1. 时钟
什么是时钟呢?
一个可以产生周期性信号的设备
什么是周期性信号?
1 ----- ----- -----0 ----- ----- -----
所以时钟信号就是周期性变化的信号
关于时钟我们有两个比较重要的概念需要理解:
T:时钟周期,最小重复的信号单元的时间长度,基本单位为s(秒)F:时钟频率,1s内有多少个重复的信号单元(1s振动多少次),单位Hz
---> T * F == 1s
例子:
F = 200Hz 意味着 1s 振动 200次
---> 每次振动的时间是 1 / 200 s == 5ms
2. 为什么需要时钟
时钟最主要的作用是用来同步信号用的
什么是同步呢?
就比如我们的左腿和右腿实际上就需要进行同步,两腿需要协同工作,左腿迈一步然后右腿迈一步,依次重复,人就能正常前行。对应在我们的机器上也是一样的,机器的运行是由很多器件协同工作完成的,当一个器件完成分给它的工作时,理应通知别的器件它完成了,轮到你干活了,等你干完我再继续干。类似于左腿迈完步子了,要等右腿迈完左腿再迈。比如:在A和B进行数据的收发时,A发完数据后应该等待B去接收,等B接收完了之后A再继续发,这种就是同步通信
而我们的M4中大部分时序逻辑电路需要同步,那设备之间怎么实现同步?
这就需要用到我们的时钟信号了
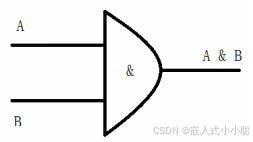
设备是怎么根据时钟信号实现同步的呢?来看电路以及时序图:
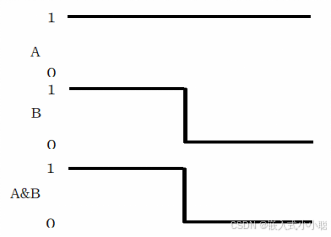
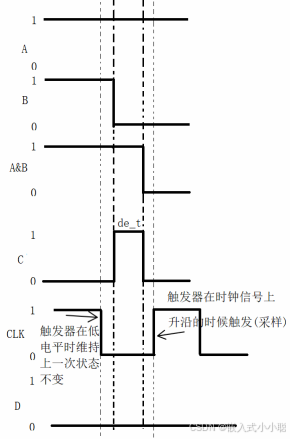
如上电路图中假设A端和B端的时序变化如下:
理论上A&B端的电平变化应该如上图所示,输出端(A&B)的电平变换应该要与B端的一致,但是实际上却是下面这样:
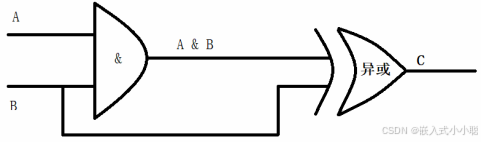
为什么会有这样的现象呢?主要是因为A和B输入到&门时,输出需要经过一段的反应时间,虽然这个时间比较短。那么在B端电平变化后,不能立马去读取输出端的电平,应该要等待一段时间后再去读取,那么应该要等待多长时间?此时间段实际上是可以获取到的,我们只需要对电路进行如下改动:
电路修改后, C端的电平的变化如下:
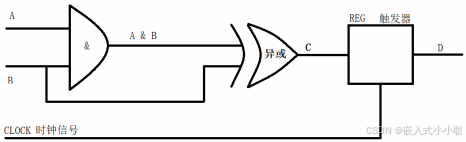
很明显,C端的高电平时期就是&门处理数据的时间(记为de_t),这段时间是不正常的,正常情况下C端应该一直是低电平(当&门处理数据没有延时的时候),我们将C端时序中凸起的地方就称之为“毛刺”。“毛刺”时期是不正常的,我们应该要略过它,略过的意思是指当B的信号发生改变时我们不应该立马去读输出值,而是应该等待一段时间,等电路(如:&门)将数据处理完毕后,再去读取输出值此时才是准确的怎么略过?此时就需要用到我们的时钟信号了
当我们在电路中加上REG后,在REG内部的触发器(假设触发器上升沿触发)的作用下,D端的电平变化如图:
通过上面的时序图可以得知,D此时输出的是一条干净的,没有“毛刺”的信号,那么通过上面这种现象我们可以总结出电路中处理“毛刺”的解决方案:
- 输入信号只能在Clock低跳变(下降沿)时改变,在Clock为高电平时保持不变
- T > 2 * de_t (周期必须大于2倍时延)


3. 时钟信号是怎么产生的呢?
在自然界中有一些物体天生就会产生摆动(振动) ---> 石英晶体
如果想利用石英晶体规则地、周期性的产生方波信号,需要一些电路来保证:
晶振电路:频率一般会比较小,如:12M、8M...
但是石英晶振难以满足现代计算机的高频需要,如:CPU它的频率会很高
那么我们就有“分频 / 倍频”电路:
分频:把输入频率变小
倍频:把输入频率变大
比如:在M4中接触的比较多的有PLL:锁相环电路
4. STM32F4xx 时钟树(时钟系统)
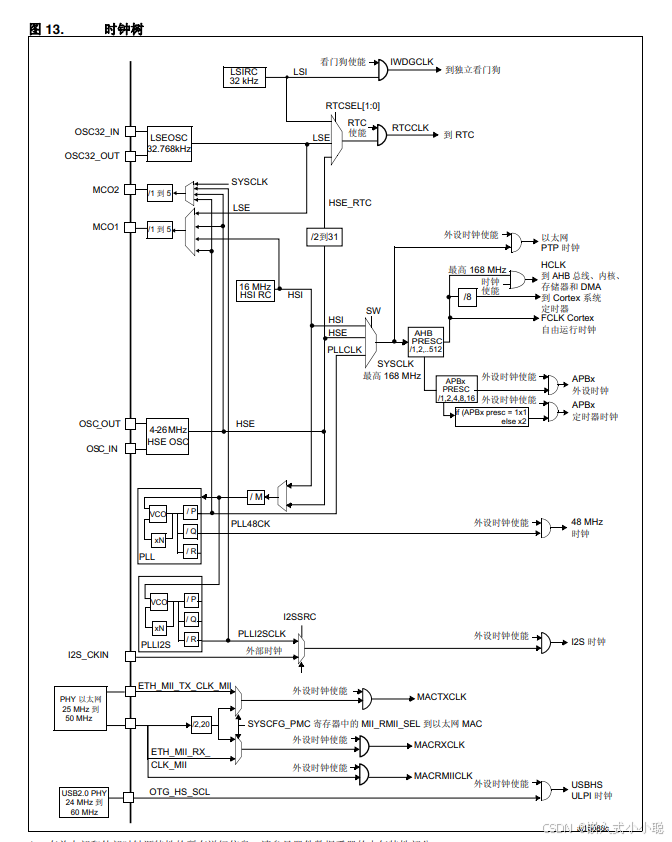
查看<STM32F4xx中文参考手册.pdf>第六章(复位和时钟控制)第二节(时钟)第107页可以得到M4的时钟树(见图<时钟树.png>)
时钟树中有几个关键名词:LSI: Low Speed Internal 内部低速时钟 (32 kHz RC振荡器)
LSE: Low Speed External 外部低速时钟 (32.768KHz)
HSI: High Speed Internal 内部高速时钟 (16 MHz RC振荡器)
HSE: High Speed External 外部高速时钟 (8MHz)
内部时钟: 由内部集成的RC震荡电路产生
外部时钟: 由晶振产生通过GEC-M4原理图可知:
HSE_VALUE = 8M(外部高速时钟8M,取决于所接晶振大小)
从HSE出发沿着线路往右边走,会来到SW选择器,选择器一共有三路输入,分别为HSE/HSI/PLLCLK(锁相环时钟),选择这三者之一作为系统时钟来使用,我们的系统时钟最高可以达到168Mhz。很明显HSE/HSI提供不了168Mhz的频率,那么则由锁相环提供
而锁相环的输入是由HSI和HSE二选一之后进行M分频后得到的。在我们M4中我们选择的是HSE,也就是8M进行M分频后输入锁相环
即 SYSCLK = PLLCLK <--- 168M
= (HSE / M) * N / P
= (8Mhz / M ) * N / P
所以PLLCLK是由M和N以及P决定,实际上这三者的值可以在代码中指定:
M ---> 代码中用PLL_M表示 ---> 8分频(根据HSE而来,目的将HSE分频为1M)
N ---> 代码中用PLL_N表示 ---> 336倍频(336M)
P ---> 代码中用PLL_P表示 ---> 2分频
选择器选择HSE / HSI / PLLCLK三者之一作为SYSCLK系统时钟后,接着就可以来到AHB总线,可以通过多个预分频器配置AHB频率、高速APB(APB2)和低速APB(APB1)频率
不同的时钟总线上挂载着不同的 外设控制器
AHB BUS = PLLCLK / (AHB Prescaler) // AHB Prescaler AHB总线的预分频
APBx BUS = AHB BUS CLK / (APBx Prescaler) // APBx Prescaler APBx总线的预分频
AHB总线时钟最大值为168M;
低速APB(APB1)最大值为42M,高速APB(APB2)最大值为84M
来到APBx总线上后,我们的定时器就挂载在APBx总线上,那我们的定时器的时钟频率是多少呢?
通过时钟树我们可以得知定时器的时钟频率分为两种:
- if (APBx presc == 1) 的意思是如果APB预分频值为1,那么定时器时钟频率等于APB的时钟频率;
- else 的意思就是如果APB预分频器值不为1,那么定时器时钟频率等于两倍的APB的时钟频率
如果APB1 CLK = 42M = AHB BUS CLK / (APB1 Prescaler)
APB1 Prescaler = 168 / 42 = 4
则位于APB1总线上的定时器时钟频率为 42M*2 = 84M
如果APB2 CLK = 84M = AHB BUS CLK / (APB2 Prescaler)
APB2 Prescaler = 168 / 84 = 2
则位于APB2总线上的定时器时钟频率为 84M*2 = 168M

5. 修改固件库时钟相关代码
因为ST公司提供固件库的时候,不知道其他公司设计的板子会采用多少频率的HSE晶振,因此只提供了最大值配置
GECM4采用的是8M HSE,所以需要修改
1)修改 HSE_VALUE 为 8M
stm32f4xx.h --> 144行
2)修改 PLL 相关
PLL_M 8 (371行)
PLL_N 336 (不需要改)
PLL_P 2 (不需要改)
system_stm32f4xx.c
上述修改需根据硬件电路的设计而来!!!
6. 定时器
timer:定时器就是用来定时的器件
通过使用计数器计算达到的时钟脉冲周期个数,当计数的时钟周期个数达到设定值并计数溢出时可以产生定时器中断,从而使内核进入中断模式
在STM32上,一般来说,定时器由三部分组成:
时基单元、输入捕获单元、输出比较单元
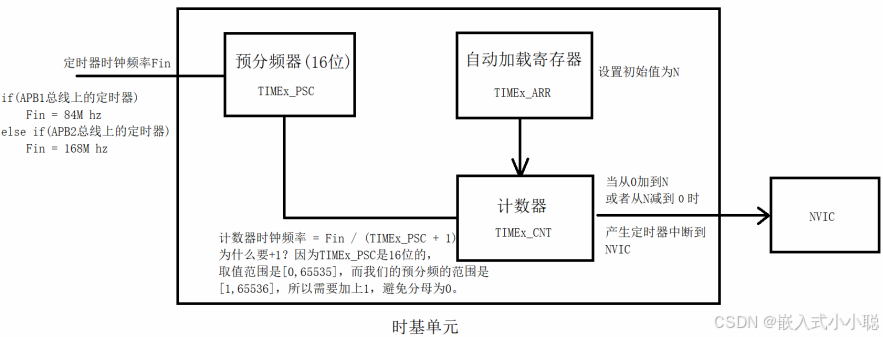
1. 时基单元:Time Bese Unit
定时器的基本单元,所有定时器都具备的单元
时基单元 = 计数器 + 重载计数值寄存器 + 定时器预分频器 组成
时基单元工作原理:
将计数器设置为一个值按照一定的时钟频率递减到0,或按照一定的时钟频率从0递增到某个值,当计数器溢出后,可以产生一个溢出事件/中断以此来达到定时的功能
组成时基单元的三个器件的作用:
1)定时器预分频器(TIMx_PSC)Prescaler
用来将定时器的总线时钟进行分频,提供一个合适的频率,给计数器去计数。分频系数介于1到65536之间,是一个16位的寄存器
2)重载计数值寄存器(TIMx_ARR)Auto Reload Register
用来设定计数值,设为N值。如果自动重装载数值为0,则计数器停止
3)计数器(TIMx_CNT) Counter
按照预分频器得到的频率,从0递增到N,或者从N递减到0,并且可以在溢出后,产生定时器中断/事件
溢出的含义为:
如果为递增计数,当计数值达到N时产生溢出
如果为递减计数,当计数值达到0时产生溢出
比如:如果为递增计数,从0开始在一定的时钟频率下开始加1,一直加,加到N时,此时完成计数,就会溢出,产生定时器中断/事件
那么我们如何知道计数器溢出产生中断时,到底花费了多少时间呢?
我们知道计数器每做一次运算(+1运算)是需要花费时间的,那么我们只需要将计数器每+1所花费的时间求出来t,那么产生中断的时间应该就为:
(N+1) * t // N+1指做了N+1次运算
// 从0递增到N或者从N递减到0是N次运算
// 此时通过重装载从N回到0或从0回到N又是一次运算
// 相当于秒钟计数从0加到59秒再加1又回到0
计数器每+1花费的时间到底是多少?首先我们要搞清楚定时器中断产生的流程:
(依据于<STM32F4xx中文参考手册>第17章<基本定时器>中图188<基本定时器框图>):
通过如上流程图可知计数器每+1所花费的时间是跟输入计数器的时钟频率有关系的
举个例子:
假设TIMEx是位于APB1总线上,那么Fin = 84M hz
为了方便计算一般情况下TIMEx_PSC设置为83
则计数器时钟频率为 Fcnt = Fin / (TIMEx_PSC + 1) = 84M hz / 84 = 1M hz = 10000000 hz
此时计数器的时钟周期Tcnt = 1 / Fcnt = 1 / 1M hz = 1us
此时即意味着计数器每过1us加1
所以产生定时器中断的时间为 Vt = (N + 1)* Tcnt = (N + 1)us
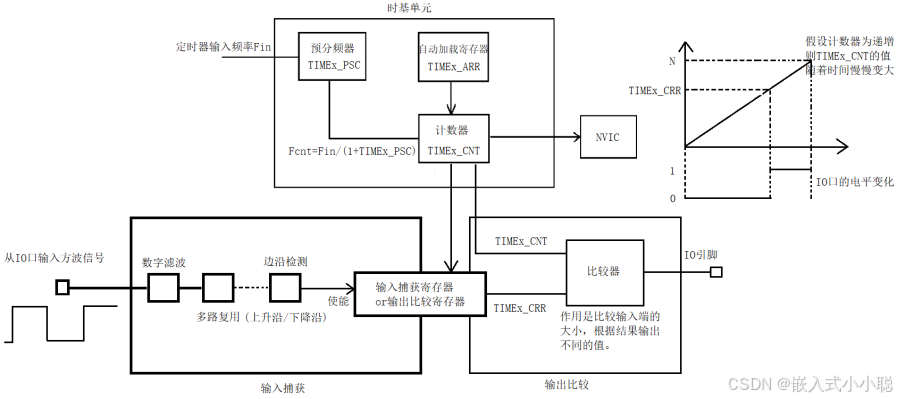
2. 输入捕获单元
可以对一个或多个输入信号进行处理
有些定时器不具备输入捕获单元
具体可以捕捉多少个输入信号需要看你的定时器有几个输入通道 Channel
有什么用呢?
比如: 可以计算输入信号的频率
输入信号经过"输入捕获阶段"(数字滤波,多路复用,预分频,去噪等等),到信号检测,当检测到需要的信号状态(上升沿变化/下降沿变化)变化时,就会把定时器时基单元中的TIMx_CNT计数器值,锁定到"输入捕获寄存器"中
这样就可以根据预先设定的定时器参数(时钟频率,N值等等),就可以计算出从开始捕获到锁定这个信号所花费的时间了 ===> t
那么进而我们就可以求出输入信号的频率 = 1/t
3. 输出比较单元
可以输出一个或多个信号
有些定时器没有输出比较单元
具体可以输出多少个信号,就需要看你的定时器有几个通道 Channel
输出比较:
定时器可以向对应的GPIO引脚(复用功能)输出一个电平状态
并且可以根据"输出比较寄存器(TIMx_CCR)"中的值,来翻转输出的电平状态
比如:
TIMx_CCR > TIMx_CNT 向GPIO引脚输出一个低电平
TIMx_CCR <= TIMx_CNT 向GPIO引脚输出一个高电平
典型应用: 输出PWM波
注意:
输入捕获和输出比较共用一个寄存器
因此同一个定时器的输入捕获和输出比较功能 ---> 不能同时使用

7. STM32F4xx 定时器概述
1)SysTick
时钟滴答定时器 ===> 系统定时器
在所有M3/M4中都会内置于NVIC中一个SysTick定时器
这个定时器被称为系统定时器,只有时基单元
并且在溢出时,会产生SysTick中断,执行中断处理函数 SysTick_Handler为什么需要这样一个定时器呢?
因为大多数操作系统,都需要一个硬件定时器来产生操作系统需要的时钟嘀嗒中断,主要用于操作系统计时,比如时间片的产生SysTick定时器作为整个系统的基本的时间单元
不跑操作系统,这个定时器有用吗?
有,延时函数就可以用SysTick来实现
SysTick被集成在NVIC中,它可以产生SysTick中断,其实就是一个简单的24bits递减定时器,它可以运行在处理器的时钟主频上,也可以是一个外部时钟(通常是芯片上的时钟源)
SysTick定时器一般可以通过图示的寄存器来操作:(参考<Cortex M3与M4权威指南.pdf>第351页)
完成配置后,每过一段设置好的时间就会产生一次SysTick中断
a. Disable SysTick(禁用SysTick) 将Control and Status控制和状态寄存器中的bit0置为0 b.选择时钟源 将Control and Status控制和状态寄存器中的bit2: 1:168M系统时钟 0:8M外部时钟 c.使能中断 将Control and Status控制和状态寄存器中的bit1: 1:SysTick中断使能 0:SysTick中断禁止 d.设定N值和计数初值 e.Enable SysTick(使能SysTick)完成配置后,每过一段设置好的时间就会产生一次SysTick中断
练习:利用SysTick实现ms级延时 需要将SysTick设置为每隔1ms产生一个中断 思路: 选择SysTick的时钟源为内核时钟:168M 计数值减1所需要的时间为:(1/168M)s 让SysTick产生中断的时间为: (N + 1) * (1/168M s) == 1ms ---> N = 167999 ------------------------------------------------------------------------ delay.h // SysTick定时器中Control and Status控制和状态寄存器 #define rSysTickCTL *((volatile unsigned long *)0xE000E010) // SysTick定时器中Reload Value重载值寄存器 #define rSysTickRELOAD *((volatile unsigned long *)0xE000E014) // SysTick定时器中Current Value寄存器 #define rSysTickCURVAL *((volatile unsigned long *)0xE000E018) ------------------------------------------------------------------------- delay.c static int delay_time; /* SysTick中断处理函数 */ void SysTick_Handler(void) { if (delay_time > 0) { delay_time--; } } /* 利用SysTick定时器实现毫秒级别的延时函数 */ void mdelay(unsigned int d) { // 1. 配置SysTick定时器 rSysTickCTL &= ~(1 << 0); // 禁止SysTick rSysTickCTL |= 1 << 2; // 选择内核时钟,168M hz rSysTickCTL |= 1 << 1; // 使能SysTick中断 rSysTickCURVAL = 0; // 当前计数值为0 rSysTickRELOAD = 168000 - 1; // N值,将你要计数的值-1赋值给N rSysTickCTL |= 1 << 0; // 使能SysTick // 2. 设置好后,此时SysTick每一毫秒产生一次中断 delay_time = d; // 3. 等 while (delay_time); rSysTickCTL &= ~(1 << 0); // 禁止SysTick,节省CPU } /* 利用SysTick定时器实现微秒级别的延时函数 */ void udelay(unsigned int d) { // 1. 配置SysTick定时器 rSysTickCTL &= ~(1 << 0); // 禁止SysTick rSysTickCTL |= 1 << 2; // 选择内核时钟,168M hz rSysTickCTL |= 1 << 1; // 使能SysTick中断 rSysTickCURVAL = 0; // 当前计数值为0 rSysTickRELOAD = 168 - 1; // N值,将你要计数的值-1赋值给N rSysTickCTL |= 1 << 0; // 使能SysTick // 2. 设置好后,此时SysTick每一毫秒产生一次中断 delay_time = d; // 3. 等 while (delay_time); rSysTickCTL &= ~(1 << 0); // 禁止SysTick,节省CPU }在STM32固件库中提供了一个配置 SysTick 定时器的函数:
uint32_t SysTick_Config(uint32_t ticks); 此函数默认采用内核时钟频率 bit2 -> 1 168M hz 使能中断 bit1 -> 1 参数ticks就是要计数的次数 = 赋值给自动加载寄存器的值 + 1 同时,在固件库中有一个全局变量 SystemCoreClock 表示系统内核时钟(168M) 如: SysTick_Config(168000); <===> SysTick_Config(SystemCoreClock / 1000); ---> 1ms产生一个中断 SysTick_Config(168); <===> SysTick_Config(SystemCoreClock / 1000000); ---> 1us产生一个中断 N * (1 / 168M)s = 1ms ===> N = 168M / 1000 配置为1ms产生一个中断: N = 内核时钟 / 1000 配置为1us产生一个中断: N = 内核时钟 / 1000000需要注意的是:
a. 固件库中 SysTick 中断处理函数已经定义了 ----> stm32f4xx_it.c 140行左右
所以如果大家想设计延时函数,请修改固件库自带的SysTick中断处理函数
方法一:找到固件库定义的SysTick_Handler函数,将函数内的代码替换成自己的
方法二:修改启动文件中,SysTick中断对应中断函数的函数名,以该函数名,重写中断处理函数
b. 最好将中断SysTick_IRQn(SysTick中断编号)的优先级配置为0
主要是为了能在其他中断中使用我们的mdelay/udelay函数
我们需要把SysTick中断优先级配置成一个比较高的优先级
原因:假设一个按键中断的优先级2,如果你的SysTick中断的优先级比2低,那么你在按键中断中调用mdelay就会死循环 ====> 死机
NVIC_SetPriority(SysTick_IRQn, 0);
delay.c static int delay_time; /* SysTick中断处理函数 */ void SysTick_Handler(void) { if (delay_time > 0) { delay_time--; } } /* 利用固件库控制SysTick定时器实现毫秒级别的延时函数 */ void mdelay(unsigned int d) { // 1. 配置SysTick定时器 // rSysTickCTL &= ~(1 << 0); // 禁止SysTick // rSysTickCTL |= 1 << 2; // 选择内核时钟,168M hz // rSysTickCTL |= 1 << 1; // 使能SysTick中断 // rSysTickCURVAL = 0; // 当前计数值为0 // rSysTickRELOAD = 168000 - 1; // N值,将你要计数的值-1赋值给N // rSysTickCTL |= 1 << 0; // 使能SysTick // SystemCoreClock 内核时钟频率 SysTick_Config(SystemCoreClock / 1000); // 让SysTick中断优先级为0(最高级) // 为了能在其他中断中,使用我们的mdelay/udelay函数 NVIC_SetPriority(SysTick_IRQn, 0); // 2. 设置好后,此时SysTick每一毫秒产生一次中断 delay_time = d; // 3. 等 while (delay_time); rSysTickCTL &= ~(1 << 0); // 禁止SysTick,节省CPU } /* 利用固件库控制SysTick定时器实现微秒级别的延时函数 */ void udelay(unsigned int d) { // 1. 配置SysTick定时器 // rSysTickCTL &= ~(1 << 0); // 禁止SysTick // rSysTickCTL |= 1 << 2; // 选择内核时钟,168M hz // rSysTickCTL |= 1 << 1; // 使能SysTick中断 // rSysTickCURVAL = 0; // 当前计数值为0 // rSysTickRELOAD = 168 - 1; // N值,将你要计数的值-1赋值给N // rSysTickCTL |= 1 << 0; // 使能SysTick // SystemCoreClock 内核时钟频率 SysTick_Config(SystemCoreClock / 1000000); // 让SysTick中断优先级为0(最高级) // 为了能在其他中断中,使用我们的mdelay/udelay函数 NVIC_SetPriority(SysTick_IRQn, 0); // 2. 设置好后,此时SysTick每一毫秒产生一次中断 delay_time = d; // 3. 等 while (delay_time); rSysTickCTL &= ~(1 << 0); // 禁止SysTick,节省CPU }2)基本定时器(TIM6,TIM7)
只有时基单元,没有输入捕获 / 输出比较单元(无输入输出引脚)
16位自动重载递增计数器 ===> 计数值上限65535,只能递增计数
用途:只用作定时器中断
3)通用定时器●TIM2 ~ TIM5
TIME3 / TIME4(16bit)、TIME2 / TIME5(32bit)计数器
计数模式可以由软件(代码)配置为:
递增(0->N),递减(N->0),先递增再递减(0->N->0)
多达4个独立的通道(可以有4个GPIO引脚复用),可以软件配置为:
输入捕获、输出比较、PWM生成、单脉冲模式输出
● TIM9~TIM14
16bits计数器,只能递增计数
2个独立的通道,可以配置为如下功能:
输入捕获、输出比较、PWM生成、单脉冲模式输出
● 用途
a) 作为基本定时器使用(只用作定时器中断) ===> 同基本定时器
b) 捕获输入信号 ===> 配置 时基单元 + 输入捕获单元
c) 输出特定信号(PWM/单脉冲) ===> 配置 时基单元 + 输出比较单元
4)高级定时器(TIM1,TIM8)16bits计数器,只能递增计数
4个独立的通道,可以配置为如下功能:
输入捕获、输出比较、PWM生成、单脉冲模式输出
● 高级
重复计数器(TIMx_RCR): Repeation Counter Register
如果使用了重复计数,则当计数器重复溢出次数达到了设定的重复计数器的值+1后,才会产生定时器溢出中断/事件
如果不用重复计数器,在每次计数器溢出时都会产生事件/中断。这个时候,和通用定时器没有区别
......
5)看门狗 Watch Dog● 为什么要看门狗?
系统 / 程序可能存在一些致命问题,会导致系统"卡死"
看门狗的作用就是当系统卡死(跑飞了)之后,会产生复位中断(Reset_Handler)
跟你按复位键效果一样
但是看门狗只不过相当于忽略了卡死的现象,它并不能帮你解决卡死的问题
● 看门狗是怎么做到的呢?
看门狗的原理其实就是个定时器,当定时器的计数溢出后,就产生溢出中断,这个中断产生后,就会去执行RESET复位中断对应的中断服务函数
● 看门狗的实现
1. 初始化配置看门狗,比如设置初始值为N
配置好之后,就会从N开始减(也可以从0加到N),当减到0时,就会CPU复位。所以在正常情况下(没有死机或者说程序没有跑飞的情况下),不能让看门狗减到0。那么为了避免在正常情况下看门狗减到0,需要“喂狗”
2. 周期性的”喂狗”(重置定时器计数值)
比如:
假如看门狗是 50ms 产生复位中断
你必须每隔 < 50ms "喂狗"一次,以避免它产生复位中断
伪代码: int main(void) { Init_Watch_Dog(50ms); // 配置50ms看门狗 ..... Wei_Dog(); // 50ms内必须喂狗让看门狗重新计时 ..... Wei_Dog(); // 50ms内必须喂狗 ..... Wei_Dog(); // 50ms内必须喂狗 }● 注意
"喂狗"不能采用定时器中断来喂狗:
因为定时器中断是无论CPU是否跑飞,都会在溢出后产生中断,用定时器喂狗,会导致看门狗失去效果
"喂狗"的正确操作是:每隔一段时间,就喂狗一次,每写一段代码,就加一行喂狗代码
8. STM32F4xx 固件库中定时器相关函数
1. 定时器时基单元(Time Base Unit)配置
a) 使能定时器时钟总线(定时器都处于APB1或APB2上) RCC_APB1PeriphClockCmd or RCC_APB2PeriphClockCmd b) 初始化定时器的时基单元 TIM_TimeBaseInit用来初始化配置定时器时基单元 void TIM_TimeBaseInit(TIM_TypeDef *TIMx, TIM_TimeBaseInitTypeDef *TIM_TimeBaseInitStruct); @TIMx:指定要初始化的定时器编号 如:TIM1,TIM2...... @TIM_TimeBaseInitStruct:指向定时器时基单元初始化信息结构体 typedef struct { uint16_t TIM_Prescaler; 指定定时器预分频值,是一个无符号的16bit的整数 定时器计数频率:TIM_CLK = Fin(定时器的输入时钟频率) / (TIM_Prescaler + 1) 计数器每 +1/-1 就需要 1/TIM_CLK s if APBx prescaler == 1 则: Fin = APBx BUS clock else Fin = APBx Bus clock * 2 TIM13 在总线APB1上,APB1 prescaler == 4 APB1 BUS clock = 168M/4 = 42M 因此,Fin = 42M*2 = 84M uint16_t TIM_CounterMode; 指定定时器计数模式(递增,递减,先递增后递减 ....) 有些定时器的模式是固定的,必须按手册来,比如:TIM9~14只能是递增计数 TIM_CounterMode_Up 递增计数 0 -> N TIM_CounterMode_Down 递减计数 N -> 0 中心对齐:计数器先从0开始计数到自动重装载值-1 ===> (N - 1), 然后从自动重装载值开始向下计数到1,之后从0开始重新计数 TIM_CounterMode_CenterAligned1 中心对齐计数方式1 只有在向下计数到1时才产生中断,向上计数不会产生中断 TIM_CounterMode_CenterAligned2 中心对齐计数方式2 只有在向上计数到N-1时才产生中断,向下计数不会产生中断 TIM_CounterMode_CenterAligned3 中心对齐计数方式3 向上计数和向下计数都会产生中断 详情请见<STM32F4xx中文参考手册.pdf>332页<14.3.2 计数器模式> uint32_t TIM_Period; 指定自动加载寄存器的值==> N值,整数,定时器周期 需要注意的是,如果计数器开始计数,比如从N开始递减计数 则每过(1/TIM_CLK)s减1,减至0后一共减了N次1,此时自动加载寄存器 (ARR)中的值(N值)会自动加载到计数器中去,将计数器中的0值变成N值(自动开始下一 次中断的计数,也就是说只要没有禁止定时器,定时器中断会一直重复不断的产生), 同时产生定时器中断,所以定时器产生中断一共计数N+1次 定时器定时时间 = (N + 1) * (1/TIM_CLK) uint16_t TIM_ClockDivision; 用于输入捕获功能 指定"输入捕获阶段"中数字滤波的采集频率分频值 TIM_CKD_DIV1 数字滤波采集频率 = 计数器频率TIM_cLK * 1 TIM_CKD_DIV2 数字滤波采集频率 = 计数器频率TIM_cLK * 2 TIM_CKD_DIV4 数字滤波采集频率 = 计数器频率TIM_cLK * 4 uint8_t TIM_RepetitionCounter; 计数器溢出重复次数,只有高级定时器TIM1和TIM8才有 计数器溢出重复次数是指只有当 "计数器" 溢出的次数 = 重复的次数时, 才会产生一个定时器的溢出中断 } TIM_TimeBaseInitTypeDef;2. 定时器中断配置(同时还需要配置NVIC)
所以定时器中断的实现步骤:当要使用定时器中断时,则需要配置由哪种方式触发定时器中断 TIM_ITConfig 用来指定触发定时器中断的方式 void TIM_ITConfig(TIM_TypeDef *TIMx, uint16_t TIM_IT, FunctionalState NewState); @TIMx:指定定时器编号,一共有十四个定时器 @TIM_IT:指定定时器中断方式 TIM_IT_Update 定时器更新中断(在计数器溢出时产生的中断) ... @NewState:使能或禁止中断 ENABLE 使能 DISABLE 禁止,就算计数器溢出也不会向NVIC报告中断a. 配置时基单元 b. 定时器中断使能 c. NVIC配置 同时写一个定时器中断处理函数就可以了 d. 使能定时器 void TIM_Cmd(TIM_TypeDef *TIMx, FunctionalState NewState) @TIMx:指定定时器编号 @NewState:是否开启定时器 Enable 开启定时器 Disable 关闭定时器3. 输出比较
不同的定时器有2~4个独立的通道,每个通道都是由于GPIO复用功能而来
因此,如果需要输出比较(输入捕获),都需要事先配置通道对应的GPIO控制(AF模式)
输出比较的实现步骤:1. 初始化GPIO控制器 需要根据原理图找到定时器的通道与引脚的对应关系 比如 PF8/TIM13_CH1 意味着PF8可以功能复用为TIM13的通道1 1.1 使能GPIO分组时钟 RCC_AHB1PeriphClockCmd(); 如:RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF, ENABLE); 1.2 初始化GPIO GPIO_Init(); --->配置GPIO引脚的功能 AF: Alternate Function 复用功能 1.3 配置GPIO复用功能 GPIO_PinAFConfig void GPIO_PinAFConfig(GPIO_TypeDef *GPIOx, uint16_t GPIO_PinSource, uint8_t GPIO_AF); @GPIOx:指定具体的GPIO分组 @GPIO_PinSource:指定具体的GPIO引脚编号 @GPIO_AF:指定具体的复用功能 比如:PF8/TIM13_CH1 GPIO_PinAFConfig(GPIOF, GPIO_PinSource8, GPIO_AF_TIM13); 2. 配置定时器时基单元 2.1 使能定时器时钟 RCC_APB1PeriphClockCmd(); or RCC_APB2PeriphClockCmd(); 2.2 初始化定时器时基单元 TIM_TimeBaseInit(); 3. 定时器输出通道配置 3.1 配置输出比较器(各个通道可以独立配置) void TIM_OC1Init(TIM_TypeDef *TIMx, TIM_OCInitTypeDef *TIM_OCInitStruct) void TIM_OC2Init(TIM_TypeDef *TIMx, TIM_OCInitTypeDef *TIM_OCInitStruct) void TIM_OC3Init(TIM_TypeDef *TIMx, TIM_OCInitTypeDef *TIM_OCInitStruct) void TIM_OC4Init(TIM_TypeDef *TIMx, TIM_OCInitTypeDef *TIM_OCInitStruct) TIM_OCxInit:x=1,2,3,4 同来配置通道1,2,3,4的输出比较器 @TIMx:指定定时器编号,如: TIM1, TIM2, ... @TIM_OCInitStruct:指向输出比较器初始化信息结构体 typedef struct { uint16_t TIM_OCMode; // 指定输出通道模式,有以下几种: TIM_OCMode_Timing: 输出比较寄存器(TIMx_CCRn)与计数器(TIIMx_CNT)的比较不会影响输出 TIM_OCMode_Active: 当TIMx_CCRn == TIIMx_CNT 输出高电平 TIM_OCMode_Inactive: 当TIMx_CCRn == TIIMx_CNT 输出低电平 TIM_OCMode_Toggle: 当TIMx_CCRn == TIIMx_CNT 输出翻转(0->1 1->0) TIM_OCMode_PWM1: 当TIIMx_CNT < TIMx_CCRn 输出有效电平(根据极性来) 当TIIMx_CNT >=TIMx_CCRn 输出无效电平 TIM_OCMode_PWM2: 当TIIMx_CNT < TIMx_CCRn 输出无效电平(根据极性来) 当TIIMx_CNT >=TIMx_CCRn 输出有效电平 uint16_t TIM_OutputState; // 指定输出信号状态(enable/disable) TIM_OutputState_Disable 不输出信号 TIM_OutputState_Enable 输出信号 uint16_t TIM_OutputNState; // 指定互补输出状态(针对高级定时器) TIM_OutputNState_Disable 不输出互补信号 TIM_OutputNState_Enable 输出互补信号 uint32_t TIM_Pulse; // 指定比较寄存器的值TIMx_CCRn,整数 uint16_t TIM_OCPolarity; // 指定输出极性:指一开始为什么电平 TIM_OCPolarity_High 高电平为有效电平 TIM_OCPolarity_Low 低电平为有效电平 uint16_t TIM_OCNPolarity; // 指定互补输出信号的极性(针对高级定时器) TIM_OCNPolarity_High TIM_OCNPolarity_Low uint16_t TIM_OCIdleState; // 指定输出引脚在idle(空闲)状态时的输出(针对高级定时器) TIM_OCIdleState_Set TIM_OCIdleState_Reset uint16_t TIM_OCNIdleState; // 指定互补输出引脚在idle(空闲)状态时的输出(针对高级定时器) TIM_OCNIdleState_Set TIM_OCNIdleState_Reset } TIM_OCInitTypeDef; 3.2 使能/禁止预装载 TIM_OC1PreloadConfig void TIM_OC1PreloadConfig(TIM_TypeDef *TIMx, uint16_t TIM_OCPreload); TIMx:指定定时器,如:TIM1, TIM2,... TIM_OCPreload: TIM_OCPreload_Enable 每次自动加载比较寄存器的值 TIM_OCPreload_Disable 不自动加载比较寄存器的值 是否使能 每次自动加载比较寄存器 4. 使能定时器 4.1 定时器ARR, N值 -> 自动装载 void TIM_ARRPreloadConfig(TIM_TypeDef *TIMx, FunctionalState NewState); TIMx:指定定时器,如:TIM1, TIM2,... NewState: ENABLE DISABLE 4.2 TIM_Cmd void TIM_Cmd(TIM_TypeDef *TIMx, FunctionalState NewState);