Road_slam
- Road_slam是一种通过相机获得鲁棒的路面标志信息,并将得到的路面标志进行分类。
- 使用路面标志作为回环检测的依据,将路面标志以及车道线作为sub-map
- sub-map可以理解为包含路面标志或是车道线的具有辨识性的一系列map
- 使用随机森林的方法提高了sub-map匹配的准确性
- 最终结果即为比较SLAM与RTK-GPS的数据的结果
- 此方法的平均全局准确度为1.098m(4.7km测试路线)
sub_map构建大致流程
- stero camera获得弹幕图像
- 通过更新相机与地面的角度,获得IPM 的bird view(俯视图)
- 对该俯视图进行二值化,并分割流通域(此时流通域即为road Marks)
- 对流通域进行ESF feature (Ensemble of Shape Function)提取
- 对提取后特征进行分类,即可获得分类后的sub-map
- 在回环中,进行sub-map的匹配
- 若形成回环,则可通过sub-map中点云的三维坐标,使用ICP求位姿
- 对得到的位姿进行优化
图例分析
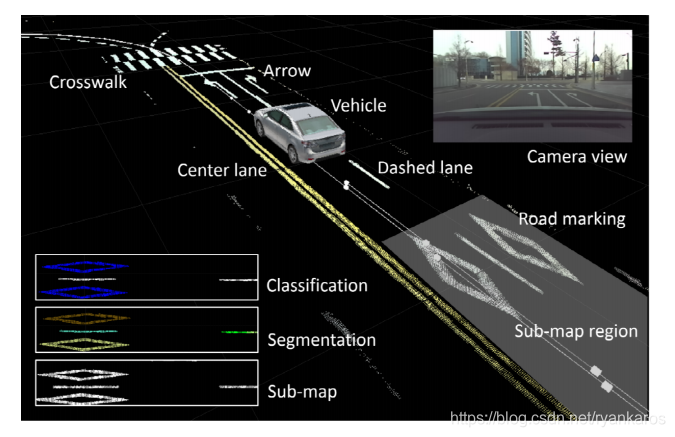
- 如图,图中对虚线,箭头,路标进行了识别,分割和分类
- 不采用实现,因为实线过多,易产生误匹配,使得结果不鲁棒
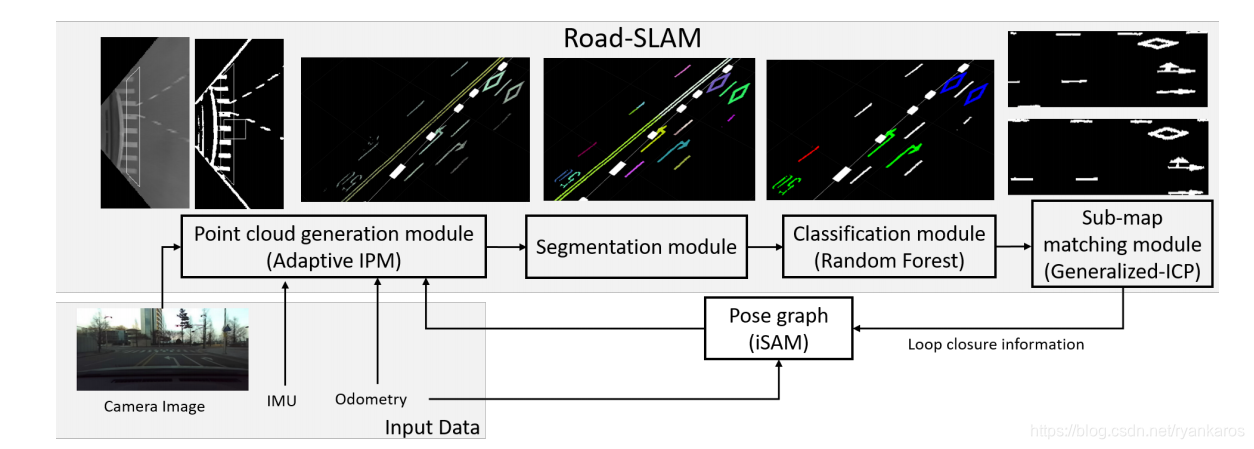
- Road_slam流程图
-
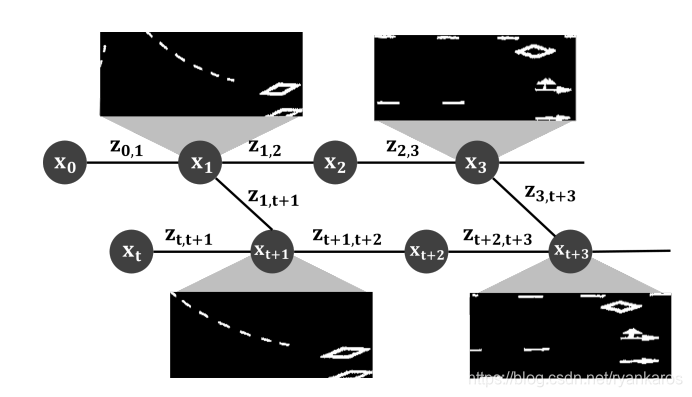
pose graph 中圆为小车的node,连线为约束(类比于g20中的vertex和edge)
-
小车位置由相机获得,constrain由imu和轮速计获得
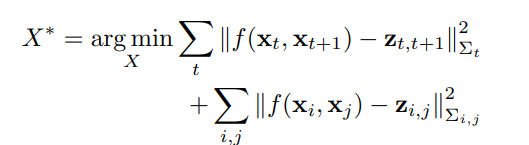
-
回环的误差方程为回环两端的匹配sub-map与各自的上一时刻的sub-map进行优化,将优化后值相加即可获得优化后位姿
-
ESF有三个参数:两个随机点间距离,三点间的面积,三点间的角度
-
通过ESF建立的特征矩阵被输入随机森林进行分类
-
随机森林结果分为六类:路面标志,数字,箭头,线,人行道和其它
-
只有informative的类别会被作为sub-map进行匹配(比如路面标志,数字,箭头,线)