参考链接
LOAM 论文
LOAM 算法论文核心关键点总结
LOAM 异常点剔除机制代码解析
系列内容
LOAM详解(二)激光里程计
LOAM详解(三)激光建图
LOAM详解(四)补充
特征点提取模块
一、对获得的点云数据进行预处理
- 将ROS类型的雷达数据转化为PCL类型的点云(获得的点云中的每个点的位姿都是相对于当前雷达的);
- 对点云进行处理,分别是去除无效点和近点;
- 异常点剔除:
论文中还考虑了在匹配时会出问题的两种情况。一种避免选择周围点已经被选择的点,或局部平面上与激光束大致平行的点,下图的a。另一种避免位于遮挡区域边界上的点,例如下图b,因为连接表面被另外一个对象遮挡,激光运动过程中旋转了视角,有可能就看不到A了。
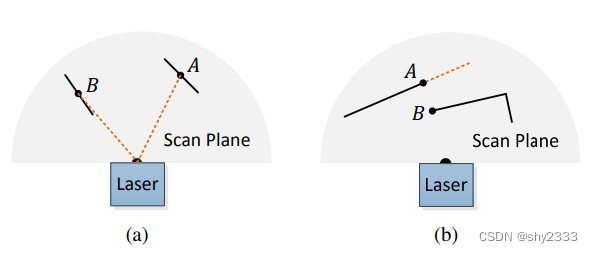
- 剔除遮挡点:计算当前点与同线束下一点的距离差,当距离差大于0.3时,剔除较远点及该点另一边相邻的5个点。
- 剔除平行点:当与前一点、后一点的距离差大于当前点自身距离的0.02倍时,认为平行点,直接剔除当前点。(没看懂)
二、计算每个点的角度,用于时间插值来去畸变
- 计算起始点和终止点的角度(起始点的角度也代表,起始点对应列的所有角度,终止点同理);
s t a r t O r i ∈ [ − π , π ] → − s t a r t O r i ∈ [ − π , π ] startOri\in[-\pi,\pi]\to-startOri\in[-\pi,\pi] startOri∈[−π,π]→−startOri∈[−π,π]
e n d O r i ∈ [ π , 3 π ] endOri\in[\pi,3\pi] endOri∈[π,3π]
∴ e n d O r i − s t a r t O r i ∈ [ 0 , 4 π ] \therefore{endOri-startOri}\in[0,4\pi] ∴endOri−startOri∈[0,4π]
∵ e n d O r i − s t a r t O r i ∈ [ π , 3 π ] \because{endOri-startOri}\in[\pi,3\pi] ∵endOri−startOri∈[π,3π]即我们只允许激光雷达终止角相比于起始角多转半圈或者少转半圈,所以要进行上图代码中的处理
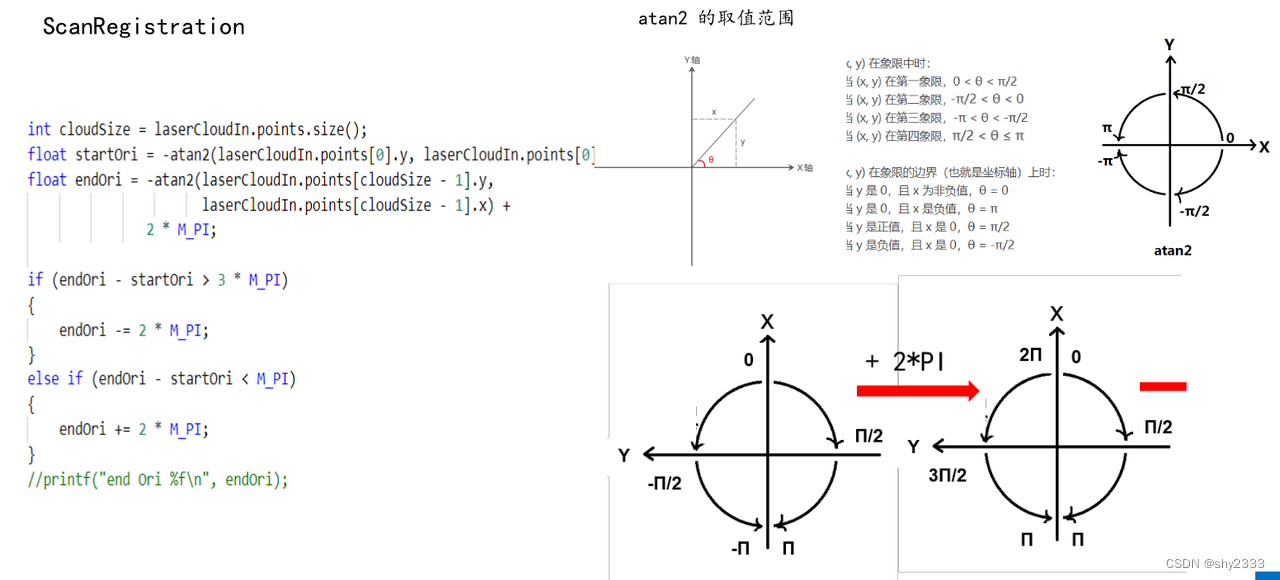
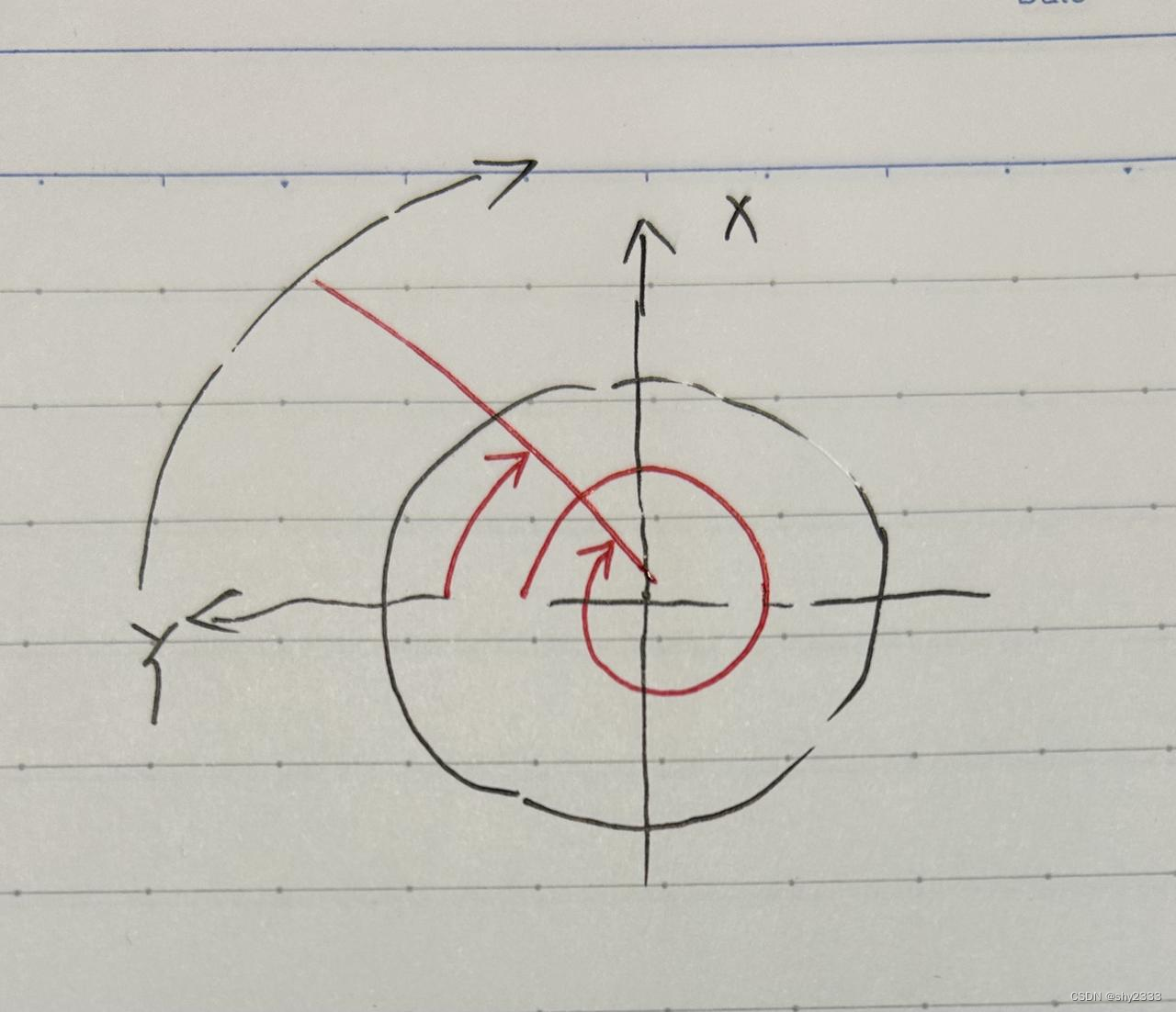
- 加上负号的原因是其顺时针旋转,而坐标系是上逆时针取正,顺时针取负
- 在KITTI数据集中Y方向朝左X方向朝前,如上图右下图所示。
因为在去除畸变后点云会出现如右下图所示的断层,而这个断层发生在起始点也就是Y轴方向,所以将Y朝左(认为前方物体相比于两侧更重要)
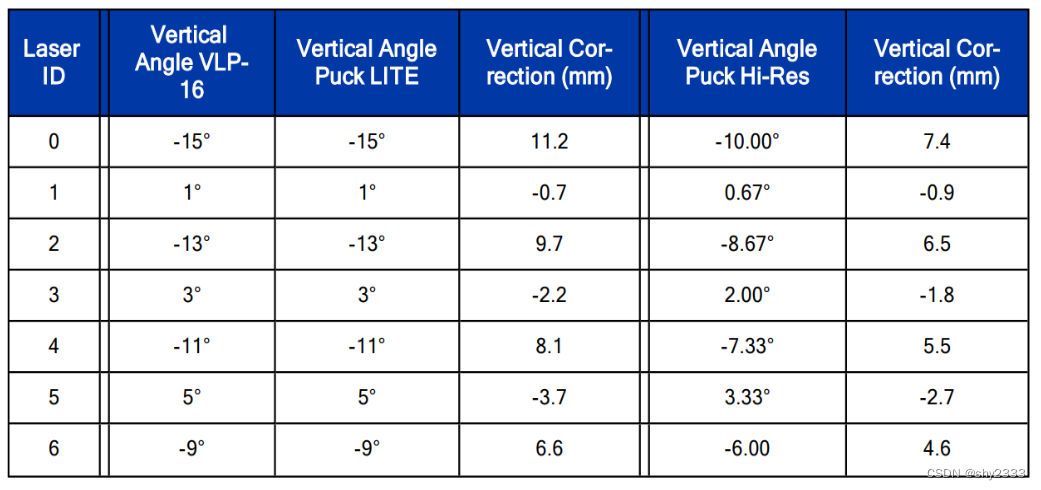
- 通过计算每个点垂直方向角度将其归算到对应线上
- 计算其他点的角度
前半圈:按理说前半圈的角度和起始角的角度差在[0,π]以内,超过了就要对角度+π或-π处理,显然这会改变角度大小,而不改变角度的大小的方法是+2π和-2π,所以将角度差向左右两边各扩大π/2,即控制在[-π/2,3π/2]以内。
后半圈:当按照前半圈的方式调整后发现角度差大于π,则认为进入后半圈,将角度+2π处理后于终止角进行比较。
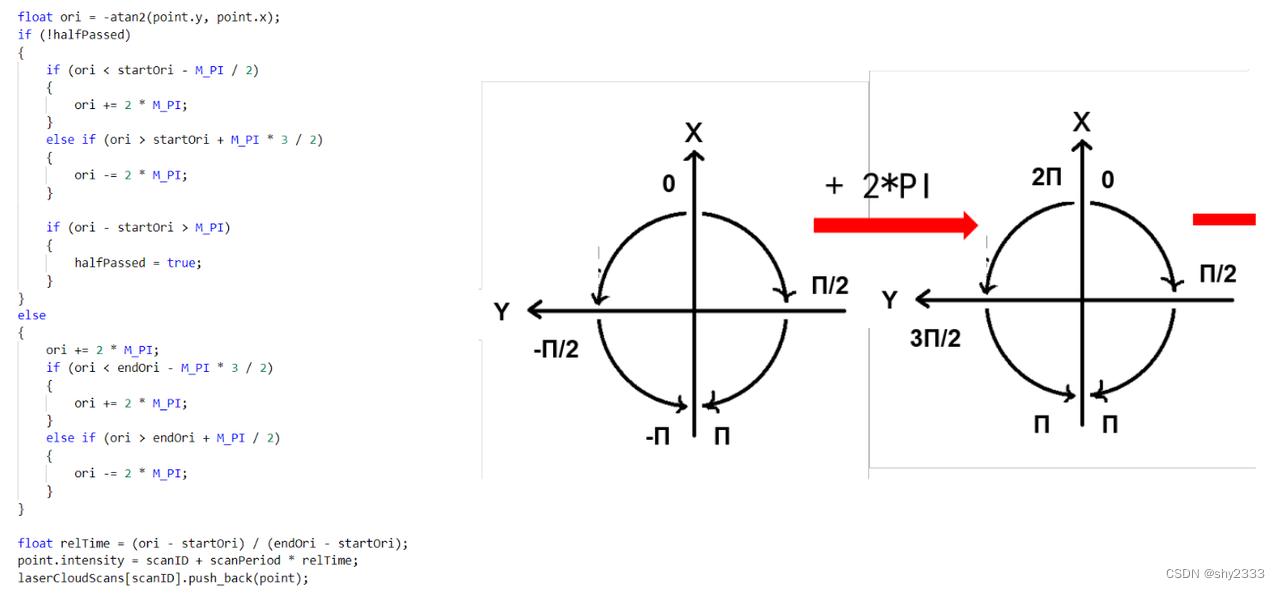
- 注意:loam的强度值存的是scanID+其在一圈中的时间占比
- 这里有一个是否过半的判断,因为终止角我们可以通过+2π来计算其角度,但其他角我们无法这样操作。
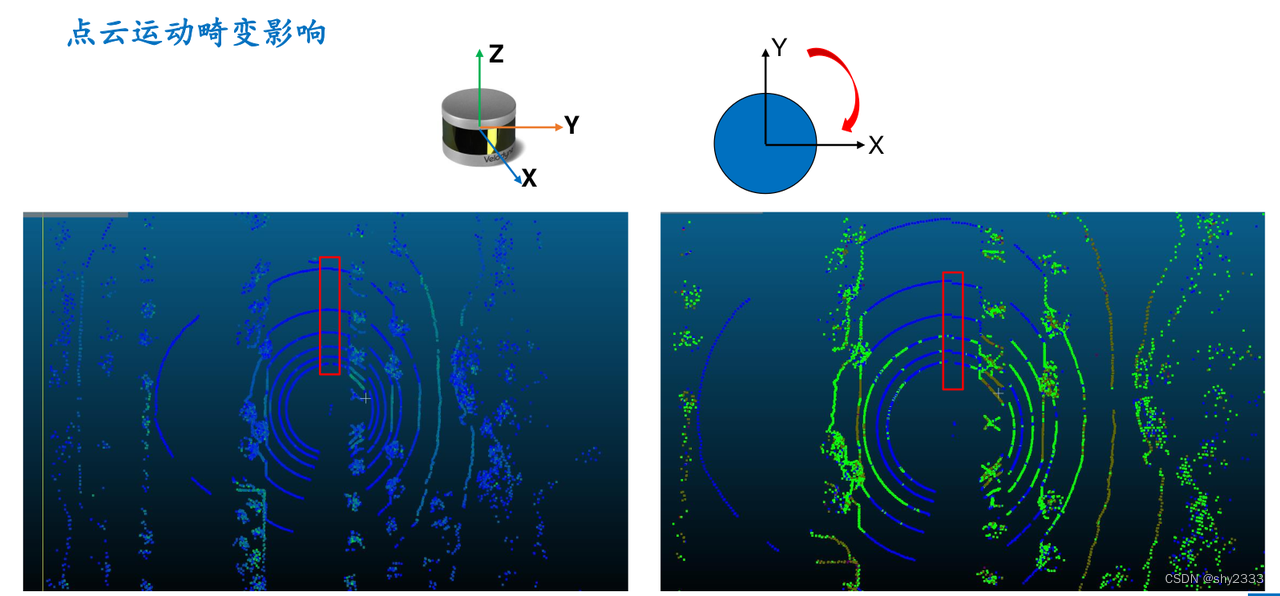
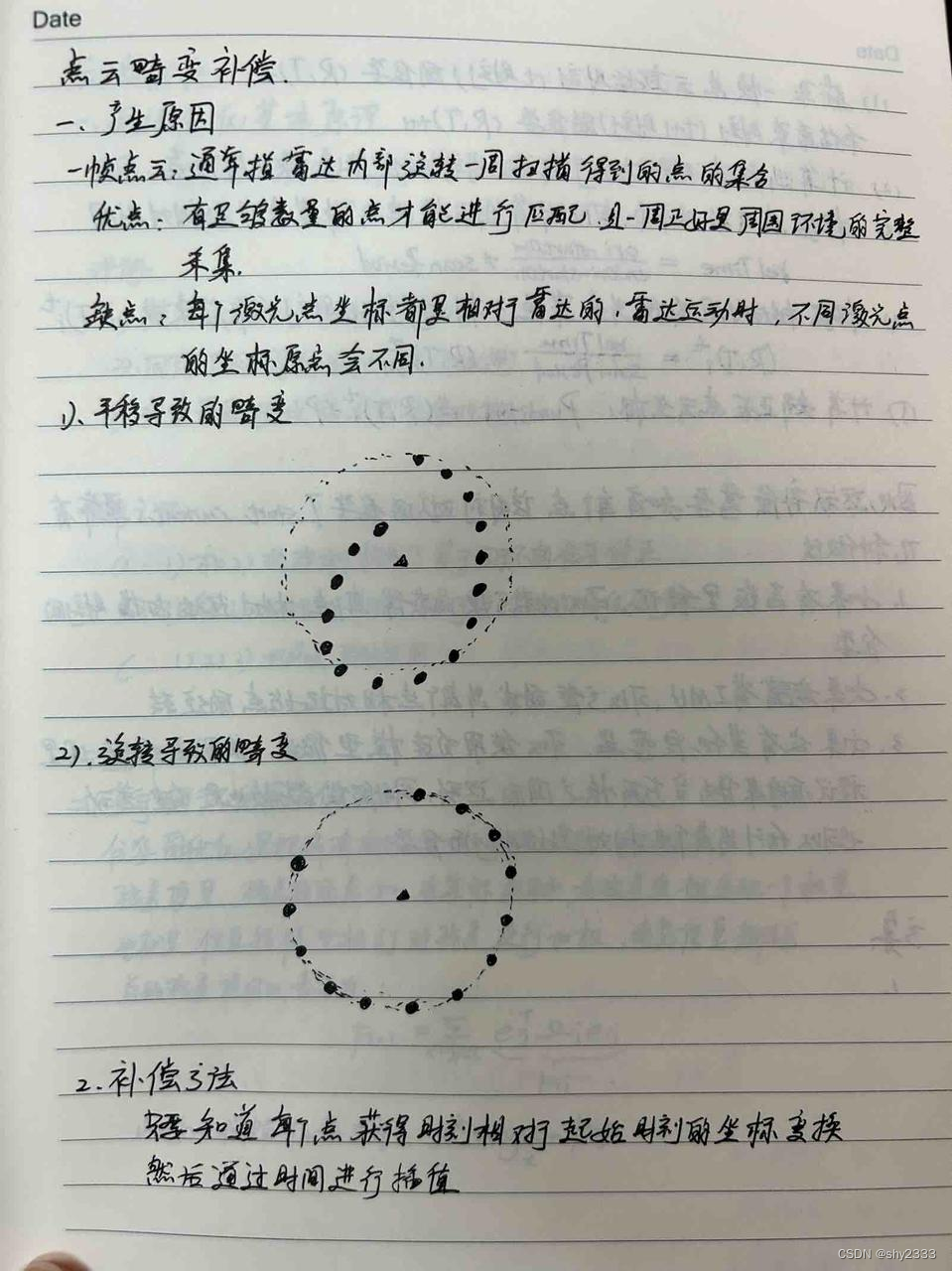
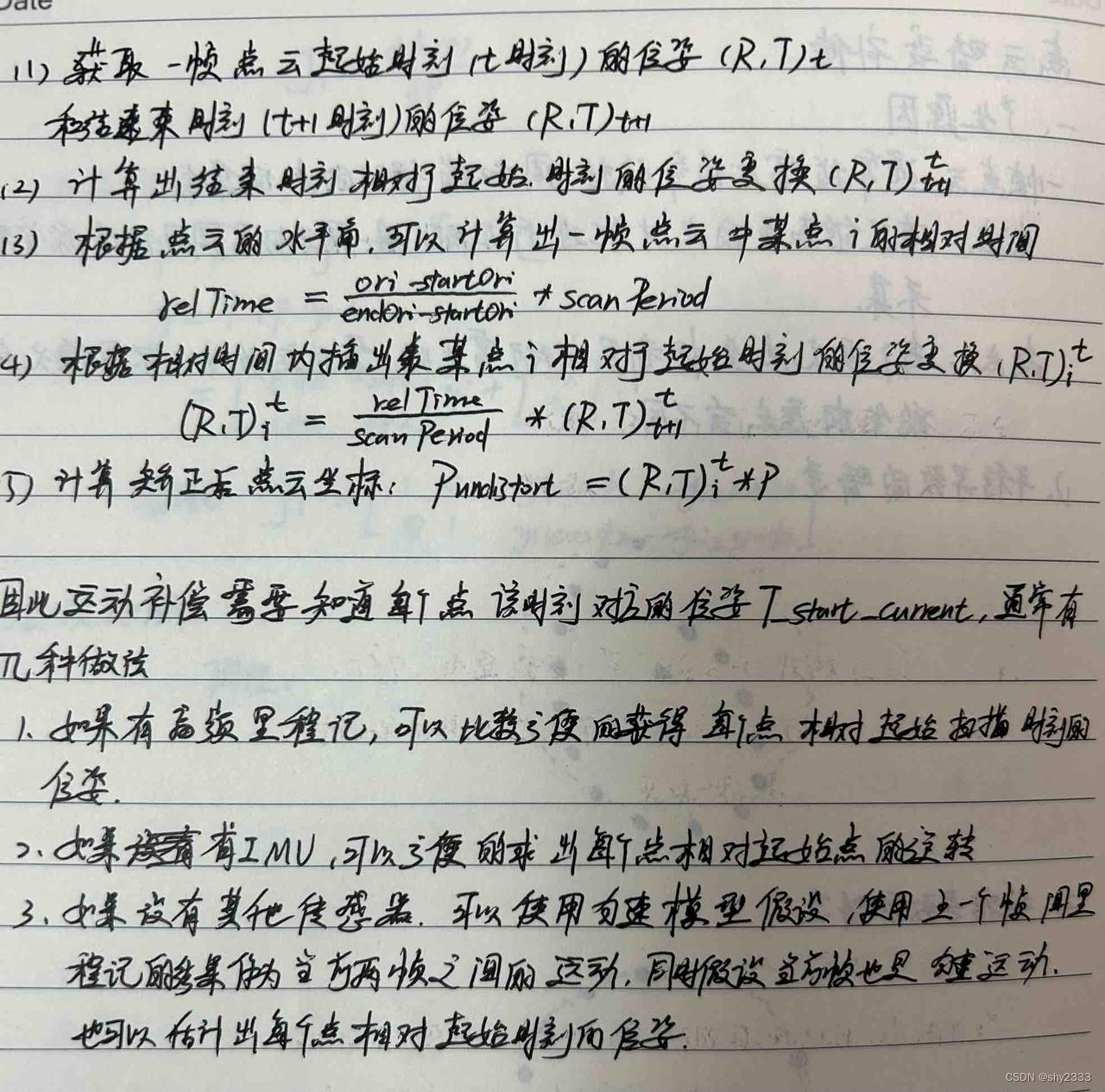
补:点云去畸变
我们知道激光雷达的⼀帧数据是过去⼀段时间⽽⾮某个时刻的数据,因此在这⼀帧时间内的激光雷达或者其载体通常会发⽣运动,因此,这⼀帧数据的原点都不⼀致,会导致⼀些问题,即运动畸变。
三、计算每个点的曲率
-
论文中计算曲率的方法
曲率 = (当前点到其附近点的距离差 / 当前点的值)的总和再求平均 = 平均的距离差
-
代码中的方法

- 去除前5个和后5个点
- 取当前点的左右两边各5个点计算曲率
计算x5的曲率
//有 x0,x1,x2,x3,x4,x5,x6,x7,x8,x9,x10
//diffX = (x0+x1+x2+x3+x4+x6+x7+x8+x9+x10)-(10*x5)
//同理得diffY,diffZ
//曲率cloudCurvature = diffX * diffX + diffY * diffY + diffZ * diffZ
- 改进思路
点云随着扫描的范围增大,远处的点会很稀疏,这时再找附近的10个点能否还可以表示其局部特征呢?
四、提取角点和平面点
根据c(曲率)值进行排序,然后选择曲率大的为角点,曲率小的为平面点。
论文中为了在环境中均匀分布特征点,将扫描分为四个相同的子区域,如果是360度,也就是80度一个区域,每个子区域最多提取2个角点,4个面点。仅当点的曲率大于或小于阈值且所选点的数量不超过最大值,才将该点选为特征点。
选择特征点时需要满足条件:
- 特征点数量满足子区域最大值,每个子区域的特征点数目是一定的。
- 特征点周围点不能再次被选择,本来每个子区域的特征点数量就比较少了,进一步防止特征点集中分布。
- 特征点非平行激光束的平面点,非被遮挡的平面点,非离群点。这些都是不可靠的点云数据,不能在连续两帧点云数据中得到,不能作为特征点。
代码中的方案
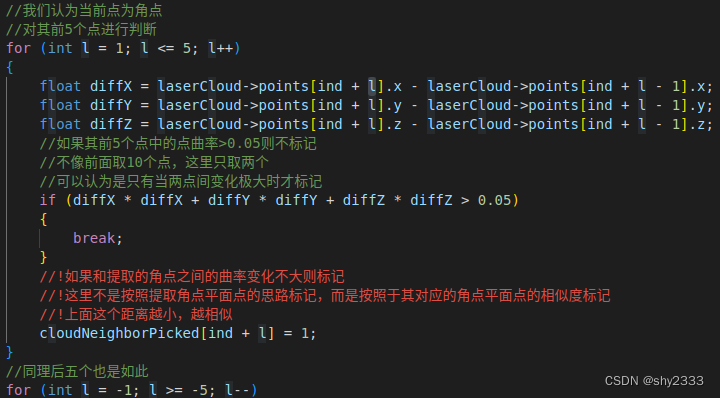
- 将每条线分割成6段
- 每段提取最多2个最角点和20个次角点(包含两个最角点)
获取一个角点将其标记,并计算该角点和其前后五个点相邻两点间的相似度(距离),如果足够相似,则标记不再作为角点。
- 每段提取最多四个平面点,并且对提取的平面点进行滤波