目录
1 引言
目前,随着科学技术的发展和电能需求量的日益增长,电力系统规模越来越庞大,超高压远距离输电、大容量发电机组、各种新型控制装置得到了广泛的应用,这对于合理利用能源,充分挖掘现有的输电潜力和保护环境都有重要意义。另一方面,随着国民经济的高速发展,以城市为中心的区域性用电增长越来越快,大电网负荷中心的用电容量越来越大,长距离重负荷输电的情况日益普遍,电力系统在人们的生活和工作中担任重要角色,电力系统的稳定运行直接影响着人们的日常生活。从技术和安全上考虑直接进行电力试验可能性很小,因此迫切要求运用电力仿真来解决这些问题。
电力系统仿真是将电力系统的模型化、数学化来模拟实际的电力系统的运行,可以帮助人们通过计算机手段分析实际电力系统的各种运行情况,从而有效的了解电力系统概况。本文根据电力系统的特点,利用MATLAB的动态仿真软件Simulink搭建了无穷大电源的系统仿真模型,得到了在该系统主供电线路电源端发生三相短路接地故障并由故障器自动跳闸隔离故障的仿真结果,并分析了这一暂态过程。通过仿真结果说明MATLAB电力系统工具箱是分析电力系统的有效工具。
此次仿真实验在MATLAB/Simulink平台上搭建10机39节点系统配电网的仿真模型,并对搭建仿真模型进行潮流计算。阐述其原理及功能,并结合仿真实验求解出现故障时的功角电压稳定的问题,进一步分析系统的暂态稳定性来验证其功能。
2 案例仿真
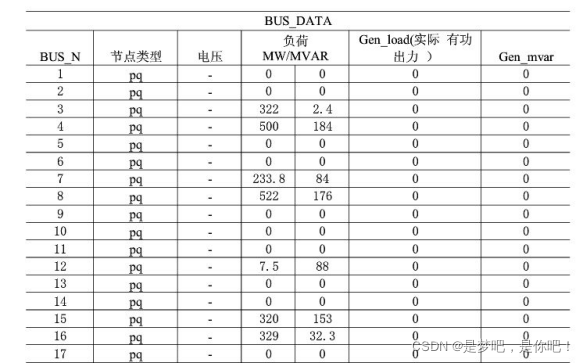
2.1 负荷参数
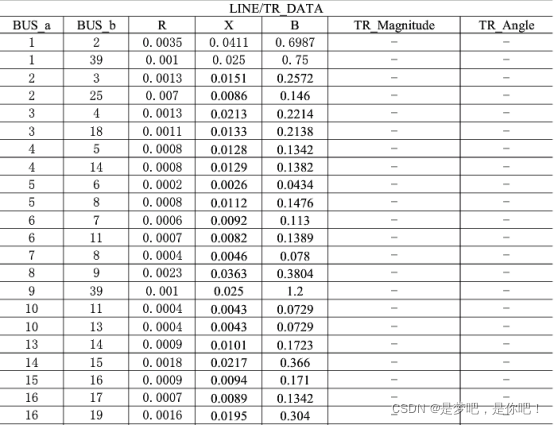
2.2 线路、变压器参数
2.3 发电机参数
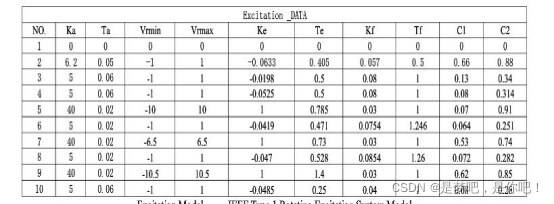
2.4 励磁参数

3 10机39节点的仿真
3.1 建立Simulink模型
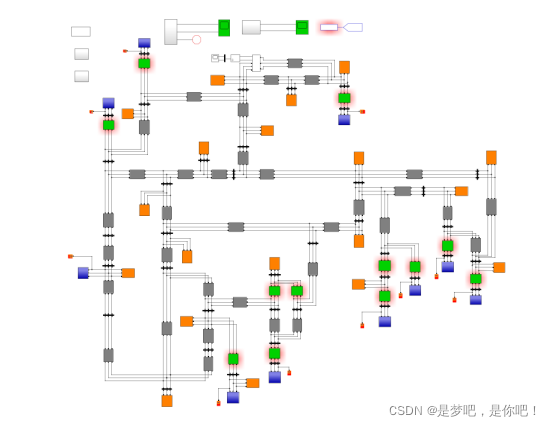
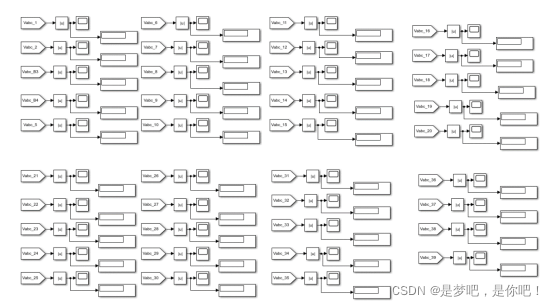
如图1所示,十机39节点系统共有10台发电机,39个节点,共46条支路,其中5条为联络开关支路、1个电源作为平衡节点。从拓扑图中可以看出,0至17节点作为干线,由干线分别从1、2、5节点引出分支。并根据网上找的资料参考进行各元件(发电机、变压器、线路和负荷)的参数设置,以便运行该模型。
图1 10机39节点模型图
图2 子模块图1
图3 子模块图2

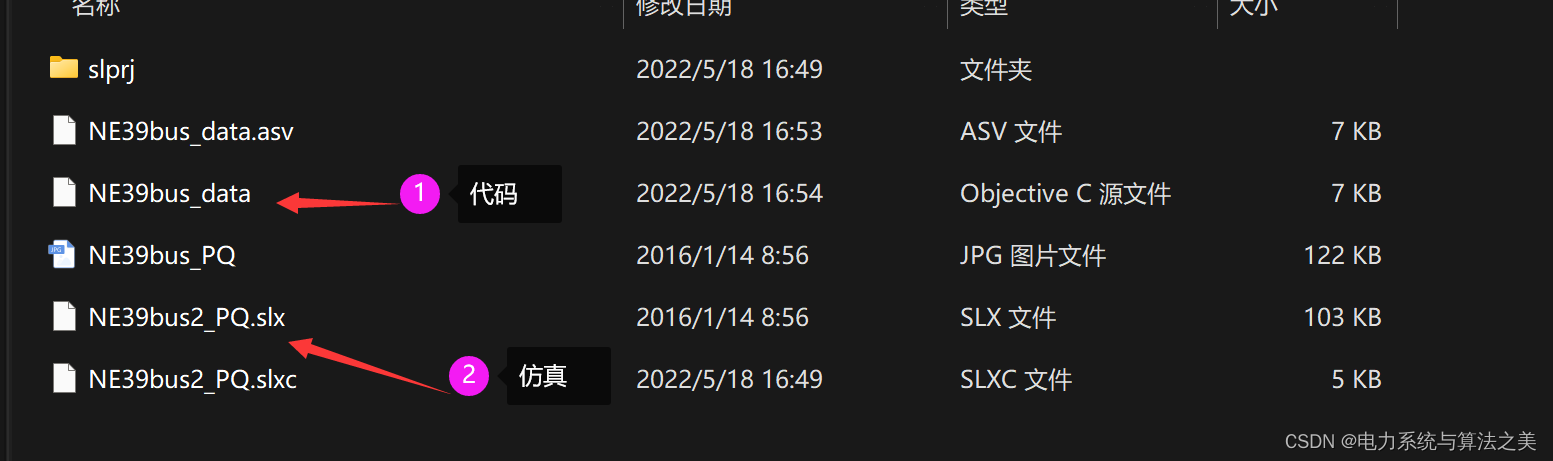
3.2 MATLAB程序实现
部分代码:
p0=[1000 520.81 650 632 508 650 560 540 830 250]'./1000;%Active Power Generation of PV units
Pn(1:10,1)=mac_con(:,3)/1000; % Nominal Power
%% Power System Stabilizer Format (MB)
% Applied power system stabilizer is MBPSS with simplified settings
% Note: All machines use MBPSS with same configuration
% 1: Global gain (G)
% 2: Frequency of low frequency band (FL) Hz
% 3: Gain of low frequency band (KL)
% 4: Frequency of intermediate frequency band (FI) Hz
% 5: Gain of intermediate frequency band (KI)
% 6: Frequency of high frequency band (FH) Hz
% 7: Gain of high frequency band (KH)
% 1 2 3 4 5 6 7
MB=[1 0.2 30 1.25 40 12 160];
%% Excitation System format (AVR_Data)
% All machines use IEEE type 1 synchronous machine voltage regulator combined to an exciter
% 1. Low pass filter time constant (Tr) sec
% 2. Regulator gain (Ka)
% 3. regulator time constant (Ta) sec
% 4. Lead-lag compensator time constant (Tb) sec
% 5. Lead-lag compensator time constant (Tc) sec
% 6. Terminal voltage (pu)
% 7. Lower limit for regulator output (Emin)
% 8. Upper limit for regulator output (Emax)
% 1 2 3 4 5 6 7 8
AVR_Data=[...
0.01 200 0.015 10 1 1.03 -5 5
0.01 200 0.015 10 1 1.03 -5 5
0.01 200 0.015 10 1 1.03 -5 5
0.01 200 0.015 10 1 1.03 -5 5
0.01 200 0.015 10 1 1.03 -5 5
0.01 200 0.015 10 1 1.03 -5 5
0.01 200 0.015 10 1 1.03 -5 5
0.01 200 0.015 10 1 1.03 -5 5
0.01 200 0.015 10 1 1.03 -5 5
0.01 200 0.015 10 1 1.03 -5 5];
C0=829.7e-9;
L0=3.220e-3;
R0=1;
Ns=120*60/(2); %Nominal speed of synchronous machines
s=10;
% PSSModel=1;%1:No pSS //1:MB
%% Bus data (Bus)
% 1. Bus number
% 2. Nominal phase-phase voltage
% 1 2
Bus = [ ...
1 345
2 345
3 345
4 345
5 345
6 345
7 345
8 345
9 345
10 345
11 345
12 230
13 345
14 345
15 345
16 345
17 345
18 345
19 345
20 345
21 345
22 345
23 345
24 345
25 345
26 345
27 345
28 345
29 345
30 22
31 22
32 22
33 22
34 22
35 22
36 22
37 22
38 22
39 345];
zbase=(line(:,8).^2)./line(:,7);
line(:,3)=line(:,3).*zbase;
line(:,4)=line(:,4).*zbase/(120*pi);
line(:,5)=line(:,5)./zbase/(120*pi);
PSSMODEL=1;
3.3 运行结果
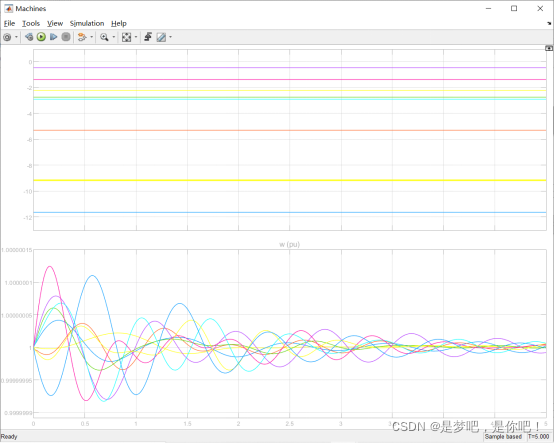
根据所建立的Simulink仿真模型和程序,进行运行,所得结果如图4所示。
图4 Machines示波图
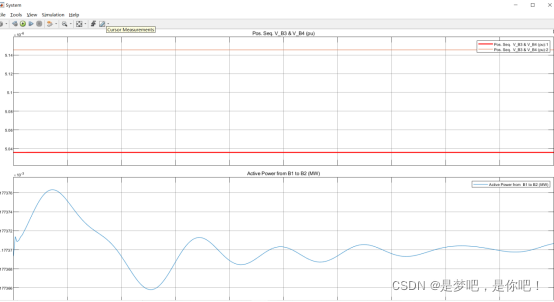
图5 System示波图
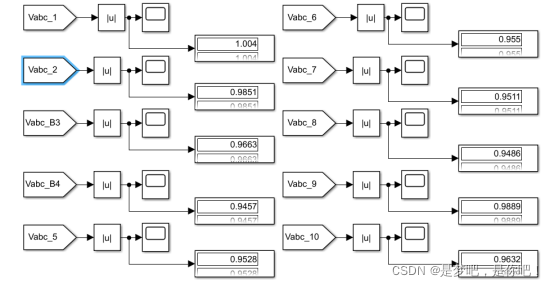
图6 1-10节点电压
图7 11-20节点电压
图8 21-30节点电压
图9 31-39节点电压
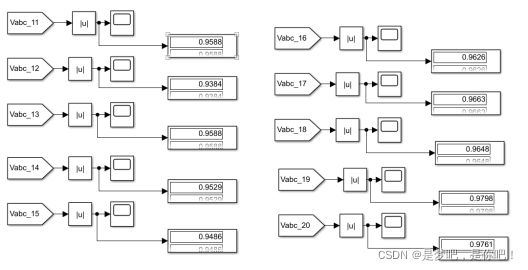

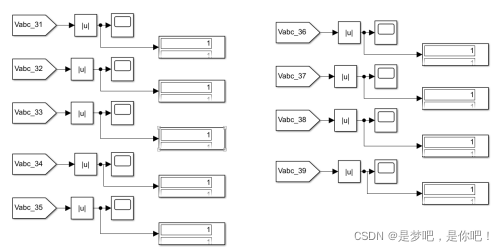
3.4 结果分析
由以上图中所得结果可以看出, 图3和图4所示波形图由一开始的波动逐渐趋于稳定,表明该系统是一个稳定的系统;图5至图8所示的39个节点的电值,都在0.93-1.1范围内波动,而且只有少数几个节点电压小于0.95,说明节点电压值处于正常电压水平。无故障情况下,该电力系统能够保持稳定行,当出现故障时,距离距离故障点越远母线越不容易受到干扰,距离故障点近,母线越不稳定,故障时间越短,各机组之间的功角差值越小,系统就越稳定。
Matlab版本:
Matlab版本:MATLAB2022b
4 总结
用Simulink构建10机39节点系统模型,并了解了相关的操作步骤。将Simulink教学和以上咱们学习的专业内容相结合,Simulink提供了各种仿真工具,尤其是它不断扩展的、内容丰富的模块率,为系统的仿真提供了极大便利。在Simulink平台上拖曳和连接典型模块就可以绘制仿真对象的模型框图,并对模型进行仿真分析。