通过FastDDS服务发现之PDP和EDP的创建这一节内容,可以了解服务发现的概念,机制和PDP/EDP中各类对象的创建,本文详细介绍Simple PDP发送数据,接收数据和处理报文的流程。
PDP发送
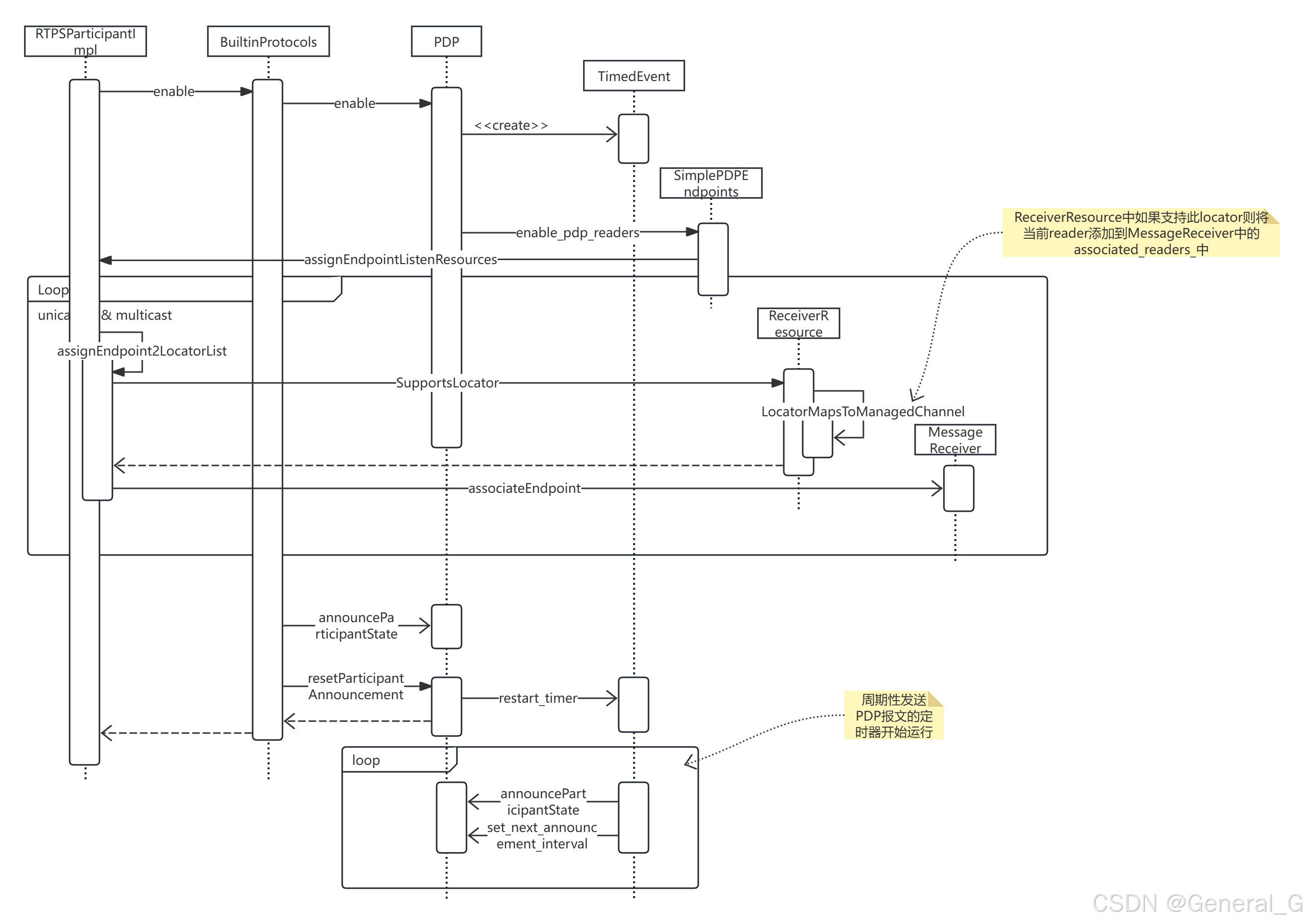
通过在RTPSParticipantImpl::enable中调用BuiltinProtocols::enable函数,开始服务发现的PDP的报文发送
void BuiltinProtocols::enable()
{
if (nullptr != mp_PDP)
{
mp_PDP->enable();
mp_PDP->announceParticipantState(true);
mp_PDP->resetParticipantAnnouncement();
}
}
在mp_PDP->enable()中主要实现分为三部分:
- 创建一个定时器,用于周期性发送PDP报文
bool PDP::enable()
{
...
resend_participant_info_event_ = new TimedEvent(mp_RTPSParticipant->getEventResource(),
[&]() -> bool
{
announceParticipantState(false);
set_next_announcement_interval();
return true;
},
0);
set_initial_announcement_interval();
...
}
通过函数set_initial_announcement_interval()设置初始发送周期为100ms,按这个周期连续发送initial_announcements_.count个报文后,周期重新设定为m_discovery.discovery_config.leaseDuration_announcementperiod,默认是3s
《TODO:抓包示例》
2. 发现自己
bool PDP::enable()
{
...
// Notify "self-discovery"
getRTPSParticipant()->on_entity_discovery(mp_RTPSParticipant->getGuid(),
get_participant_proxy_data(mp_RTPSParticipant->getGuid().guidPrefix)->m_properties);
...
}
这里调用
bool StatisticsParticipantImpl::are_statistics_writers_enabled(
uint32_t checked_enabled_writers)
{
return (enabled_writers_mask_ & checked_enabled_writers);
}
默认enabled_writers_mask_ 为0,需要实际并没有做什么操作(TODO)
3. 分配组播和单播地址:mp_PDP->enable()中继续调用builtin_endpoints_->enable_pdp_readers函数,这个函数最终调到RTPSParticipantImpl::assignEndpointListenResources:
bool RTPSParticipantImpl::assignEndpointListenResources(
Endpoint* endp)
{
//Tag the endpoint with the ReceiverResources
bool valid = true;
//UNICAST
assignEndpoint2LocatorList(endp, endp->getAttributes().unicastLocatorList);
//MULTICAST
assignEndpoint2LocatorList(endp, endp->getAttributes().multicastLocatorList);
return valid;
}
bool RTPSParticipantImpl::assignEndpoint2LocatorList(
Endpoint* endp,
LocatorList_t& list)
{
for (auto lit = list.begin(); lit != list.end(); ++lit)
{
//Iteration of all Locators within the Locator list passed down as argument
std::lock_guard<std::mutex> guard(m_receiverResourcelistMutex);
//Check among ReceiverResources whether the locator is supported or not
for (auto it = m_receiverResourcelist.begin(); it != m_receiverResourcelist.end(); ++it)
{
if (it->Receiver->SupportsLocator(*lit))
{
it->mp_receiver->associateEndpoint(endp);
}
}
return true;
}
默认单播地址为“本地ip:7410”,组播地址为“239.255.0.1:7400”,assignEndpoint2LocatorList中会通过判断locator,具体来说是判断locator中的kind和port,这一步是通过调用ReceiverResource的lambda来判断:
LocatorMapsToManagedChannel = [&transport, locator](const Locator_t& locatorToCheck) -> bool
{
return locator.kind == locatorToCheck.kind && transport.DoInputLocatorsMatch(locator, locatorToCheck);
};
如果判断结果为true, assignEndpoint2LocatorList中继续调用 MessageReceiver::associateEndpoint函数,会将PDP对象的{EntityID:vector<RTPSReader*>}添加到MessageReceiver::associated_readers_中, 收到PDP报文后的处理流程同subscriber一致,收到消息后查找对应的RTPSReader并进行下一步处理。
oid MessageReceiver::associateEndpoint(
Endpoint* to_add)
{
...
const auto reader = dynamic_cast<RTPSReader*>(to_add);
const auto entityId = reader->getGuid().entityId;
// search for set of readers by entity ID
const auto readers = associated_readers_.find(entityId);
if (readers == associated_readers_.end())
{
auto vec = std::vector<RTPSReader*>();
vec.push_back(reader);
associated_readers_.emplace(entityId, vec);
}
...
}
将 {entityid: PDPreader} 添加到associated_readers_用于接收收到其他participant的服务发现消息。这样就完成了reader对这几个地址的监听。
mp_PDP->announceParticipantState(true):完成在mp_PDP->enable()的三部分后,开始调用PDPSimple::announceParticipantState发送第一个PDP数据包,具体报文的组装发送在PDP::announceParticipantState中实现。
随后调用mp_PDP->resetParticipantAnnouncement()开启定时器,开始周期性发送。
PDP接收
PDPListener用于监听和接收PDP报文,接收流程同其他DataReader的接收流程,具体可以参考 FastDDS之UDP通信,UDP层收到PDP消息后调用PDPListener::onNewCacheChangeAdded开始处理PDP报文
void PDPListener::onNewCacheChangeAdded(
RTPSReader* reader,
const CacheChange_t* const change_in)
{
...
if (change->kind == ALIVE)
{
// 如果是自己,则直接返回,因为在创建之初就已经添加了
if (guid == parent_pdp_->getRTPSParticipant()->getGuid())
...
CDRMessage_t msg(change->serializedPayload);
temp_participant_data_.clear();
if (temp_participant_data_.readFromCDRMessage(&msg, true, parent_pdp_->getRTPSParticipant()->network_factory(),
parent_pdp_->getRTPSParticipant()->has_shm_transport(), true, change_in->vendor_id))
{
// After correctly reading it
change->instanceHandle = temp_participant_data_.m_key;
guid = temp_participant_data_.m_guid;
if (parent_pdp_->getRTPSParticipant()->is_participant_ignored(guid.guidPrefix))
{
return;
}
// Filter locators
const auto& pattr = parent_pdp_->getRTPSParticipant()->getAttributes();
fastdds::rtps::network::external_locators::filter_remote_locators(temp_participant_data_,
pattr.builtin.metatraffic_external_unicast_locators, pattr.default_external_unicast_locators,
pattr.ignore_non_matching_locators);
// Check if participant already exists (updated info)
ParticipantProxyData* pdata = nullptr;
bool already_processed = false;
for (ParticipantProxyData* it : parent_pdp_->participant_proxies_)
{
if (guid == it->m_guid)
{
pdata = it;
if (it->m_sample_identity.writer_guid() == change->writerGUID &&
it->m_sample_identity.sequence_number() == change->sequenceNumber)
{
already_processed = true;
}
break;
}
}
// Only process the DATA(p) if it is not a repeated one
if (!already_processed)
{
temp_participant_data_.m_sample_identity.writer_guid(change->writerGUID);
temp_participant_data_.m_sample_identity.sequence_number(change->sequenceNumber);
process_alive_data(pdata, temp_participant_data_, writer_guid, reader, lock);
}
}
}
...
//Remove change form history.
parent_pdp_->builtin_endpoints_->remove_from_pdp_reader_history(change);
}
主要分三种情况:
- 如果发现了自己(通过对比guid:
guid == parent_pdp_->getRTPSParticipant()->getGuid())不做任何处理直接返回,因为自身的ParticipantProxyData已经添加到participant_proxies_中了,细节请参考FastDDS服务发现之PDP和EDP的创建 - 如果是第一次发现某一个其他Participant或者该Participant的Sample没有被处理过(TODO:在什么情况下没有被处理过),PDP的数据会保存到
ParticipantProxyData的对象中,调用PDPListener::process_alive_data进行下一步处理 - 如果这个Participant已经被发现和接收处理了(通过
already_processed判断,already_processed是由guid,SampleIdentity中writer_guid和sequence_number一致才可以置为true,TODO:判断条件),也不做任何处理退出 - 上述三种情况完成处理后都会调用
remove_from_pdp_reader_history从datareader的history中删除CacheChange。
void PDPListener::process_alive_data(
ParticipantProxyData* old_data,
ParticipantProxyData& new_data,
GUID_t& writer_guid,
RTPSReader* reader,
std::unique_lock<std::recursive_mutex>& lock)
{
GUID_t participant_guid = new_data.m_guid;
if (old_data == nullptr)
{
// Create a new one when not found
old_data = parent_pdp_->createParticipantProxyData(new_data, writer_guid);
if (old_data != nullptr)
{
// Copy proxy to be passed forward before releasing PDP mutex
ParticipantProxyData old_data_copy(*old_data);
reader->getMutex().unlock();
lock.unlock();
parent_pdp_->assignRemoteEndpoints(&old_data_copy);
}
else
{
reader->getMutex().unlock();
lock.unlock();
}
}
else
{
old_data->updateData(new_data);
old_data->isAlive = true;
reader->getMutex().unlock();
EPROSIMA_LOG_INFO(RTPS_PDP_DISCOVERY, "Update participant "
<< old_data->m_guid << " at "
<< "MTTLoc: " << old_data->metatraffic_locators
<< " DefLoc:" << old_data->default_locators);
if (parent_pdp_->updateInfoMatchesEDP())
{
parent_pdp_->mp_EDP->assignRemoteEndpoints(*old_data, true);
}
// Copy proxy to be passed forward before releasing PDP mutex
ParticipantProxyData old_data_copy(*old_data);
lock.unlock();
RTPSParticipantListener* listener = parent_pdp_->getRTPSParticipant()->getListener();
if (listener != nullptr)
{
bool should_be_ignored = false;
{
std::lock_guard<std::mutex> cb_lock(parent_pdp_->callback_mtx_);
ParticipantDiscoveryInfo info(old_data_copy);
info.status = ParticipantDiscoveryInfo::CHANGED_QOS_PARTICIPANT;
listener->onParticipantDiscovery(
parent_pdp_->getRTPSParticipant()->getUserRTPSParticipant(),
std::move(info),
should_be_ignored);
}
if (should_be_ignored)
{
parent_pdp_->getRTPSParticipant()->ignore_participant(participant_guid.guidPrefix);
}
}
}
#ifdef FASTDDS_STATISTICS
//! Addition or update of a participant proxy should trigger
//! a connections update on the local participant connection list
if (nullptr != parent_pdp_->getRTPSParticipant()->get_connections_observer())
{
parent_pdp_->getRTPSParticipant()->get_connections_observer()->on_local_entity_connections_change(
parent_pdp_->getRTPSParticipant()->getGuid());
}
#endif //FASTDDS_STATISTICS
// Take again the reader lock
reader->getMutex().lock();
}
PDPListener::process_alive_data中的处理分为两种情况:parent_pdp_->participant_proxies_中没有ParticipantProxyData和接收到PDP报文相同的guid(对应if(old_data == nullptr)分支);parent_pdp_->participant_proxies_中找到ParticipantProxyData和接收到PDP报文相同的guid。
第一种情况:通过调用parent_pdp_->createParticipantProxyData创建一个ParticipantProxyData对象用来保存新发现的participant的对象信息,再调用PDPSimple::assignRemoteEndpoints,PDPSimple::assignRemoteEndpoints中调用PDPSimple::match_pdp_remote_endpoints和PDPSimple::assign_low_level_remote_endpoints。
void PDPSimple::match_pdp_remote_endpoints(
const ParticipantProxyData& pdata,
bool notify_secure_endpoints)
{
#if !HAVE_SECURITY
static_cast<void>(notify_secure_endpoints);
#endif // !HAVE_SECURITY
auto endpoints = static_cast<fastdds::rtps::SimplePDPEndpoints*>(builtin_endpoints_.get());
const NetworkFactory& network = mp_RTPSParticipant->network_factory();
bool use_multicast_locators = !mp_RTPSParticipant->getAttributes().builtin.avoid_builtin_multicast ||
pdata.metatraffic_locators.unicast.empty();
const uint32_t endp = pdata.m_availableBuiltinEndpoints;
// Default to values for non-secure endpoints
auto reliability_kind = BEST_EFFORT_RELIABILITY_QOS;
uint32_t pdp_reader_mask = DISC_BUILTIN_ENDPOINT_PARTICIPANT_DETECTOR;
uint32_t pdp_writer_mask = DISC_BUILTIN_ENDPOINT_PARTICIPANT_ANNOUNCER;
EntityId_t reader_entity_id = c_EntityId_SPDPReader;
EntityId_t writer_entity_id = c_EntityId_SPDPWriter;
RTPSReader* reader = endpoints->reader.reader_;
RTPSWriter* writer = endpoints->writer.writer_;
if (0 != (endp & pdp_writer_mask))
{
auto temp_writer_data = get_temporary_writer_proxies_pool().get();
temp_writer_data->clear();
temp_writer_data->guid().guidPrefix = pdata.m_guid.guidPrefix;
temp_writer_data->guid().entityId = writer_entity_id;
temp_writer_data->persistence_guid(pdata.get_persistence_guid());
temp_writer_data->set_persistence_entity_id(writer_entity_id);
temp_writer_data->set_remote_locators(pdata.metatraffic_locators, network, use_multicast_locators);
temp_writer_data->m_qos.m_reliability.kind = reliability_kind;
temp_writer_data->m_qos.m_durability.kind = TRANSIENT_LOCAL_DURABILITY_QOS;
{
reader->matched_writer_add(*temp_writer_data);
}
}
if (0 != (endp & pdp_reader_mask))
{
auto temp_reader_data = get_temporary_reader_proxies_pool().get();
temp_reader_data->clear();
temp_reader_data->m_expectsInlineQos = false;
temp_reader_data->guid().guidPrefix = pdata.m_guid.guidPrefix;
temp_reader_data->guid().entityId = reader_entity_id;
temp_reader_data->set_remote_locators(pdata.metatraffic_locators, network, use_multicast_locators);
temp_reader_data->m_qos.m_reliability.kind = reliability_kind;
temp_reader_data->m_qos.m_durability.kind = TRANSIENT_LOCAL_DURABILITY_QOS;
{
writer->matched_reader_add(*temp_reader_data);
}
if (BEST_EFFORT_RELIABILITY_QOS == reliability_kind)
{
endpoints->writer.writer_->unsent_changes_reset();
}
}
}
这段代码主要设置了ProxyPool<WriterProxyData>和ProxyPool<ReaderProxyData>这两个l临时对象用于存放PDP发现的Participant中的RTPSWriter和RTPSReader对象,其中guidprefix,persistence_guid,metatraffic_locators都来自PDP报文中的值,其他都是固定赋值。然后使用这两个临时对象通过调用StatelessReader::matched_writer_add/StatelessWriter::matched_reader_add更新当前PDP的RTPSReader和RTPSWriter。
bool StatelessReader::matched_writer_add(
const WriterProxyData& wdata)
{
ReaderListener* listener = nullptr;
{
std::unique_lock<RecursiveTimedMutex> guard(mp_mutex);
listener = mp_listener;
for (RemoteWriterInfo_t& writer : matched_writers_)
{
if (writer.guid == wdata.guid())
{
EPROSIMA_LOG_INFO(RTPS_READER, "Attempting to add existing writer, updating information");
if (EXCLUSIVE_OWNERSHIP_QOS == m_att.ownershipKind &&
writer.ownership_strength != wdata.m_qos.m_ownershipStrength.value)
{
mp_history->writer_update_its_ownership_strength_nts(
writer.guid, wdata.m_qos.m_ownershipStrength.value);
}
writer.ownership_strength = wdata.m_qos.m_ownershipStrength.value;
if (nullptr != listener)
{
// call the listener without the lock taken
guard.unlock();
listener->on_writer_discovery(this, WriterDiscoveryInfo::CHANGED_QOS_WRITER, wdata.guid(),
&wdata);
}
#ifdef FASTDDS_STATISTICS
// notify monitor service so that the connectionlist for this entity
// could be updated
if (nullptr != mp_RTPSParticipant->get_connections_observer() && !m_guid.is_builtin())
{
mp_RTPSParticipant->get_connections_observer()->on_local_entity_connections_change(m_guid);
}
#endif //FASTDDS_STATISTICS
return false;
}
}
bool is_same_process = RTPSDomainImpl::should_intraprocess_between(m_guid, wdata.guid());
bool is_datasharing = is_datasharing_compatible_with(wdata);
RemoteWriterInfo_t info;
info.guid = wdata.guid();
info.persistence_guid = wdata.persistence_guid();
info.has_manual_topic_liveliness = (MANUAL_BY_TOPIC_LIVELINESS_QOS == wdata.m_qos.m_liveliness.kind);
info.is_datasharing = is_datasharing;
info.ownership_strength = wdata.m_qos.m_ownershipStrength.value;
if (is_datasharing)
{
if (datasharing_listener_->add_datasharing_writer(wdata.guid(),
m_att.durabilityKind == VOLATILE,
mp_history->m_att.maximumReservedCaches))
{
EPROSIMA_LOG_INFO(RTPS_READER, "Writer Proxy " << wdata.guid() << " added to " << this->m_guid.entityId
<< " with data sharing");
}
else
{
EPROSIMA_LOG_ERROR(RTPS_READER, "Failed to add Writer Proxy " << wdata.guid()
<< " to " << this->m_guid.entityId
<< " with data sharing.");
return false;
}
}
if (matched_writers_.emplace_back(info) == nullptr)
{
EPROSIMA_LOG_WARNING(RTPS_READER, "No space to add writer " << wdata.guid() << " to reader " << m_guid);
if (is_datasharing)
{
datasharing_listener_->remove_datasharing_writer(wdata.guid());
}
return false;
}
EPROSIMA_LOG_INFO(RTPS_READER, "Writer " << wdata.guid() << " added to reader " << m_guid);
add_persistence_guid(info.guid, info.persistence_guid);
m_acceptMessagesFromUnkownWriters = false;
// Intraprocess manages durability itself
if (is_datasharing && !is_same_process && m_att.durabilityKind != VOLATILE)
{
// simulate a notification to force reading of transient changes
// this has to be done after the writer is added to the matched_writers or the processing may fail
datasharing_listener_->notify(false);
}
}
if (liveliness_lease_duration_ < c_TimeInfinite)
{
auto wlp = mp_RTPSParticipant->wlp();
if ( wlp != nullptr)
{
wlp->sub_liveliness_manager_->add_writer(
wdata.guid(),
liveliness_kind_,
liveliness_lease_duration_);
}
else
{
EPROSIMA_LOG_ERROR(RTPS_LIVELINESS, "Finite liveliness lease duration but WLP not enabled");
}
}
if (nullptr != listener)
{
listener->on_writer_discovery(this, WriterDiscoveryInfo::DISCOVERED_WRITER, wdata.guid(), &wdata);
}
#ifdef FASTDDS_STATISTICS
// notify monitor service so that the connectionlist for this entity
// could be updated
if (nullptr != mp_RTPSParticipant->get_connections_observer() && !m_guid.is_builtin())
{
mp_RTPSParticipant->get_connections_observer()->on_local_entity_connections_change(m_guid);
}
#endif //FASTDDS_STATISTICS
return true;
}
StatelessReader::matched_writer_add的核心就是如果已经存在于matched_writers_中则更新qos等数据,如果不存在则构造一个RemoteWriterInfo_t对象,用于保存PDP发现的participant中的writer的信息,并将其添加到当前服务发现的端点StatelessReader的matched_writers_中。
bool StatelessWriter::matched_reader_add(
const ReaderProxyData& data)
{
using fastdds::rtps::network::external_locators::filter_remote_locators;
std::unique_lock<RecursiveTimedMutex> guard(mp_mutex);
std::unique_lock<LocatorSelectorSender> locator_selector_guard(locator_selector_);
assert(data.guid() != c_Guid_Unknown);
if (for_matched_readers(matched_local_readers_, matched_datasharing_readers_, matched_remote_readers_,
[this, &data](ReaderLocator& reader)
{
if (reader.remote_guid() == data.guid())
{
EPROSIMA_LOG_WARNING(RTPS_WRITER, "Attempting to add existing reader, updating information.");
if (reader.update(data.remote_locators().unicast,
data.remote_locators().multicast,
data.m_expectsInlineQos))
{
filter_remote_locators(*reader.general_locator_selector_entry(),
m_att.external_unicast_locators, m_att.ignore_non_matching_locators);
update_reader_info(true);
}
return true;
}
return false;
}
))
{
if (nullptr != mp_listener)
{
// call the listener without locks taken
locator_selector_guard.unlock();
guard.unlock();
mp_listener->on_reader_discovery(this, ReaderDiscoveryInfo::CHANGED_QOS_READER, data.guid(), &data);
}
#ifdef FASTDDS_STATISTICS
// notify monitor service so that the connectionlist for this entity
// could be updated
if (nullptr != mp_RTPSParticipant->get_connections_observer() && !m_guid.is_builtin())
{
mp_RTPSParticipant->get_connections_observer()->on_local_entity_connections_change(m_guid);
}
#endif //FASTDDS_STATISTICS
return false;
}
// Get a locator from the inactive pool (or create a new one if necessary and allowed)
std::unique_ptr<ReaderLocator> new_reader;
if (matched_readers_pool_.empty())
{
size_t max_readers = matched_readers_pool_.max_size();
if (getMatchedReadersSize() + matched_readers_pool_.size() < max_readers)
{
const RemoteLocatorsAllocationAttributes& loc_alloc =
mp_RTPSParticipant->getRTPSParticipantAttributes().allocation.locators;
new_reader.reset(new ReaderLocator(
this,
loc_alloc.max_unicast_locators,
loc_alloc.max_multicast_locators));
}
else
{
EPROSIMA_LOG_WARNING(RTPS_WRITER, "Couldn't add matched reader due to resource limits");
return false;
}
}
else
{
new_reader = std::move(matched_readers_pool_.back());
matched_readers_pool_.pop_back();
}
// Add info of new datareader.
new_reader->start(data.guid(),
data.remote_locators().unicast,
data.remote_locators().multicast,
data.m_expectsInlineQos,
is_datasharing_compatible_with(data));
filter_remote_locators(*new_reader->general_locator_selector_entry(),
m_att.external_unicast_locators, m_att.ignore_non_matching_locators);
locator_selector_.locator_selector.add_entry(new_reader->general_locator_selector_entry());
if (new_reader->is_local_reader())
{
matched_local_readers_.push_back(std::move(new_reader));
EPROSIMA_LOG_INFO(RTPS_WRITER, "Adding reader " << data.guid() << " to " << this->m_guid.entityId
<< " as local reader");
}
else if (new_reader->is_datasharing_reader())
{
matched_datasharing_readers_.push_back(std::move(new_reader));
EPROSIMA_LOG_INFO(RTPS_WRITER, "Adding reader " << data.guid() << " to " << this->m_guid.entityId
<< " as data sharing");
}
else
{
matched_remote_readers_.push_back(std::move(new_reader));
EPROSIMA_LOG_INFO(RTPS_WRITER, "Adding reader " << data.guid() << " to " << this->m_guid.entityId
<< " as remote reader");
}
update_reader_info(true);
if (nullptr != mp_listener)
{
// call the listener without locks taken
locator_selector_guard.unlock();
guard.unlock();
mp_listener->on_reader_discovery(this, ReaderDiscoveryInfo::DISCOVERED_READER, data.guid(), &data);
}
#ifdef FASTDDS_STATISTICS
// notify monitor service so that the connectionlist for this entity
// could be updated
if (nullptr != mp_RTPSParticipant->get_connections_observer() && !m_guid.is_builtin())
{
mp_RTPSParticipant->get_connections_observer()->on_local_entity_connections_change(m_guid);
}
#endif //FASTDDS_STATISTICS
return true;
}
StatelessWriter::matched_reader_add的更新类似,先构造一个ReaderLocator对象,ReaderLocator中保存了unicast和multicast的Locator_t用于发送向这些Locator_t发送PDP报文,还有其他需要的信息,将ReaderLocator对象保存在本地(分别对应matched_local_readers_,matched_datasharing_readers_, matched_remote_readers_),接着通过调用StatelessWriter::update_reader_info更新LocatorSelectorSender信息,并调用RTPSParticipantImpl::createSenderResources创建Sender Resource。sender resource的创建可以参考这里:TODO)
void StatelessWriter::update_reader_info(
bool create_sender_resources)
{
...
update_cached_info_nts(locator_selector_);
if (addGuid)
{
compute_selected_guids(locator_selector_);
}
if (create_sender_resources)
{
RTPSParticipantImpl* part = mp_RTPSParticipant;
locator_selector_.locator_selector.for_each([part](const Locator_t& loc)
{
part->createSenderResources(loc);
});
}
}
以上完成了通过PDP报文更新PDP数据的过程了。
EDP更新
PDPSimple::assign_low_level_remote_endpoints主要用于EDP对象的更新,实现如下:
void PDPSimple::assign_low_level_remote_endpoints(
const ParticipantProxyData& pdata,
bool notify_secure_endpoints)
{
if (mp_EDP != nullptr)
{
mp_EDP->assignRemoteEndpoints(pdata, notify_secure_endpoints);
}
...
}
这里主要关注通过调用EDPSimple::assignRemoteEndpoints实现对EDP对象的更新:
void EDPSimple::assignRemoteEndpoints(
const ParticipantProxyData& pdata,
bool assign_secure_endpoints)
{
EPROSIMA_LOG_INFO(RTPS_EDP, "New DPD received, adding remote endpoints to our SimpleEDP endpoints");
const NetworkFactory& network = mp_RTPSParticipant->network_factory();
uint32_t endp = pdata.m_availableBuiltinEndpoints;
uint32_t auxendp;
bool use_multicast_locators = !mp_PDP->getRTPSParticipant()->getAttributes().builtin.avoid_builtin_multicast ||
pdata.metatraffic_locators.unicast.empty();
auto temp_reader_proxy_data = get_temporary_reader_proxies_pool().get();
temp_reader_proxy_data->clear();
temp_reader_proxy_data->m_expectsInlineQos = false;
temp_reader_proxy_data->guid().guidPrefix = pdata.m_guid.guidPrefix;
temp_reader_proxy_data->set_remote_locators(pdata.metatraffic_locators, network, use_multicast_locators);
temp_reader_proxy_data->m_qos.m_durability.kind = TRANSIENT_LOCAL_DURABILITY_QOS;
temp_reader_proxy_data->m_qos.m_reliability.kind = RELIABLE_RELIABILITY_QOS;
auto temp_writer_proxy_data = get_temporary_writer_proxies_pool().get();
temp_writer_proxy_data->clear();
temp_writer_proxy_data->guid().guidPrefix = pdata.m_guid.guidPrefix;
temp_writer_proxy_data->persistence_guid(pdata.get_persistence_guid());
temp_writer_proxy_data->set_remote_locators(pdata.metatraffic_locators, network, use_multicast_locators);
temp_writer_proxy_data->m_qos.m_durability.kind = TRANSIENT_LOCAL_DURABILITY_QOS;
temp_writer_proxy_data->m_qos.m_reliability.kind = RELIABLE_RELIABILITY_QOS;
auxendp = endp;
auxendp &= DISC_BUILTIN_ENDPOINT_PUBLICATION_ANNOUNCER;
if (auxendp != 0 && publications_reader_.first != nullptr) //Exist Pub Writer and i have pub reader
{
EPROSIMA_LOG_INFO(RTPS_EDP, "Adding SEDP Pub Writer to my Pub Reader");
temp_writer_proxy_data->guid().entityId = c_EntityId_SEDPPubWriter;
temp_writer_proxy_data->set_persistence_entity_id(c_EntityId_SEDPPubWriter);
publications_reader_.first->matched_writer_add(*temp_writer_proxy_data);
}
auxendp = endp;
auxendp &= DISC_BUILTIN_ENDPOINT_PUBLICATION_DETECTOR;
if (auxendp != 0 && publications_writer_.first != nullptr) //Exist Pub Detector
{
EPROSIMA_LOG_INFO(RTPS_EDP, "Adding SEDP Pub Reader to my Pub Writer");
temp_reader_proxy_data->guid().entityId = c_EntityId_SEDPPubReader;
publications_writer_.first->matched_reader_add(*temp_reader_proxy_data);
}
auxendp = endp;
auxendp &= DISC_BUILTIN_ENDPOINT_SUBSCRIPTION_ANNOUNCER;
if (auxendp != 0 && subscriptions_reader_.first != nullptr) //Exist Pub Announcer
{
EPROSIMA_LOG_INFO(RTPS_EDP, "Adding SEDP Sub Writer to my Sub Reader");
temp_writer_proxy_data->guid().entityId = c_EntityId_SEDPSubWriter;
temp_writer_proxy_data->set_persistence_entity_id(c_EntityId_SEDPSubWriter);
subscriptions_reader_.first->matched_writer_add(*temp_writer_proxy_data);
}
auxendp = endp;
auxendp &= DISC_BUILTIN_ENDPOINT_SUBSCRIPTION_DETECTOR;
if (auxendp != 0 && subscriptions_writer_.first != nullptr) //Exist Pub Announcer
{
EPROSIMA_LOG_INFO(RTPS_EDP, "Adding SEDP Sub Reader to my Sub Writer");
temp_reader_proxy_data->guid().entityId = c_EntityId_SEDPSubReader;
subscriptions_writer_.first->matched_reader_add(*temp_reader_proxy_data);
}
#if HAVE_SECURITY
auxendp = endp;
auxendp &= DISC_BUILTIN_ENDPOINT_PUBLICATION_SECURE_ANNOUNCER;
if (auxendp != 0 && publications_secure_reader_.first != nullptr && assign_secure_endpoints)
{
temp_writer_proxy_data->guid().entityId = sedp_builtin_publications_secure_writer;
temp_writer_proxy_data->set_persistence_entity_id(sedp_builtin_publications_secure_writer);
if (!mp_RTPSParticipant->security_manager().discovered_builtin_writer(
publications_secure_reader_.first->getGuid(), pdata.m_guid, *temp_writer_proxy_data,
publications_secure_reader_.first->getAttributes().security_attributes()))
{
EPROSIMA_LOG_ERROR(RTPS_EDP, "Security manager returns an error for writer " <<
publications_secure_reader_.first->getGuid());
}
}
auxendp = endp;
auxendp &= DISC_BUILTIN_ENDPOINT_PUBLICATION_SECURE_DETECTOR;
if (auxendp != 0 && publications_secure_writer_.first != nullptr && assign_secure_endpoints)
{
temp_reader_proxy_data->guid().entityId = sedp_builtin_publications_secure_reader;
if (!mp_RTPSParticipant->security_manager().discovered_builtin_reader(
publications_secure_writer_.first->getGuid(), pdata.m_guid, *temp_reader_proxy_data,
publications_secure_writer_.first->getAttributes().security_attributes()))
{
EPROSIMA_LOG_ERROR(RTPS_EDP, "Security manager returns an error for writer " <<
publications_secure_writer_.first->getGuid());
}
}
auxendp = endp;
auxendp &= DISC_BUILTIN_ENDPOINT_SUBSCRIPTION_SECURE_ANNOUNCER;
if (auxendp != 0 && subscriptions_secure_reader_.first != nullptr && assign_secure_endpoints)
{
temp_writer_proxy_data->guid().entityId = sedp_builtin_subscriptions_secure_writer;
temp_writer_proxy_data->set_persistence_entity_id(sedp_builtin_subscriptions_secure_writer);
if (!mp_RTPSParticipant->security_manager().discovered_builtin_writer(
subscriptions_secure_reader_.first->getGuid(), pdata.m_guid, *temp_writer_proxy_data,
subscriptions_secure_reader_.first->getAttributes().security_attributes()))
{
EPROSIMA_LOG_ERROR(RTPS_EDP, "Security manager returns an error for writer " <<
subscriptions_secure_reader_.first->getGuid());
}
}
auxendp = endp;
auxendp &= DISC_BUILTIN_ENDPOINT_SUBSCRIPTION_SECURE_DETECTOR;
if (auxendp != 0 && subscriptions_secure_writer_.first != nullptr && assign_secure_endpoints)
{
EPROSIMA_LOG_INFO(RTPS_EDP, "Adding SEDP Sub Reader to my Sub Writer");
temp_reader_proxy_data->guid().entityId = sedp_builtin_subscriptions_secure_reader;
if (!mp_RTPSParticipant->security_manager().discovered_builtin_reader(
subscriptions_secure_writer_.first->getGuid(), pdata.m_guid, *temp_reader_proxy_data,
subscriptions_secure_writer_.first->getAttributes().security_attributes()))
{
EPROSIMA_LOG_ERROR(RTPS_EDP, "Security manager returns an error for writer " <<
subscriptions_secure_writer_.first->getGuid());
}
}
#else
static_cast<void>(assign_secure_endpoints);
#endif // if HAVE_SECURITY
}
这段代码中通过设置ProxyPool<ReaderProxyData>和ProxyPool<WriterProxyData>两个临时对象,用于更新EDP的两对Endpoints端点,其中ProxyPool<WriterProxyData>用于更新publications_reader_和subscriptions_reader_,ProxyPool<ReaderProxyData>用于更新publications_writer_和subscriptions_writer_。这里只更新对端的guid(guidPrefix为对端的guidPrefix,entityid为默认值c_EntityId_SEDPPubReader和c_EntityId_SEDPSubWriter),和metatraffic_locators(单播地址,默认对端ip:7410),durability qos为TRANSIENT_LOCAL_DURABILITY_QOS,reliability qos为RELIABLE_RELIABILITY_QOS。
bool StatefulReader::matched_writer_add(
const WriterProxyData& wdata)
{
assert(wdata.guid() != c_Guid_Unknown);
ReaderListener* listener = nullptr;
{
std::unique_lock<RecursiveTimedMutex> guard(mp_mutex);
if (!is_alive_)
{
return false;
}
listener = mp_listener;
bool is_same_process = RTPSDomainImpl::should_intraprocess_between(m_guid, wdata.guid());
bool is_datasharing = is_datasharing_compatible_with(wdata);
for (WriterProxy* it : matched_writers_)
{
if (it->guid() == wdata.guid())
{
EPROSIMA_LOG_INFO(RTPS_READER, "Attempting to add existing writer, updating information");
// If Ownership strength changes then update all history instances.
if (EXCLUSIVE_OWNERSHIP_QOS == m_att.ownershipKind &&
it->ownership_strength() != wdata.m_qos.m_ownershipStrength.value)
{
mp_history->writer_update_its_ownership_strength_nts(
it->guid(), wdata.m_qos.m_ownershipStrength.value);
}
it->update(wdata);
if (!is_same_process)
{
for (const Locator_t& locator : it->remote_locators_shrinked())
{
getRTPSParticipant()->createSenderResources(locator);
}
}
if (nullptr != listener)
{
// call the listener without the lock taken
guard.unlock();
listener->on_writer_discovery(this, WriterDiscoveryInfo::CHANGED_QOS_WRITER, wdata.guid(), &wdata);
}
#ifdef FASTDDS_STATISTICS
// notify monitor service so that the connectionlist for this entity
// could be updated
if (nullptr != mp_RTPSParticipant->get_connections_observer() && !m_guid.is_builtin())
{
mp_RTPSParticipant->get_connections_observer()->on_local_entity_connections_change(m_guid);
}
#endif //FASTDDS_STATISTICS
return false;
}
}
// Get a writer proxy from the inactive pool (or create a new one if necessary and allowed)
WriterProxy* wp = nullptr;
if (matched_writers_pool_.empty())
{
size_t max_readers = matched_writers_pool_.max_size();
if (getMatchedWritersSize() + matched_writers_pool_.size() < max_readers)
{
const RTPSParticipantAttributes& part_att = mp_RTPSParticipant->getRTPSParticipantAttributes();
wp = new WriterProxy(this, part_att.allocation.locators, proxy_changes_config_);
}
else
{
EPROSIMA_LOG_WARNING(RTPS_READER, "Maximum number of reader proxies (" << max_readers << \
") reached for writer " << m_guid);
return false;
}
}
else
{
wp = matched_writers_pool_.back();
matched_writers_pool_.pop_back();
}
SequenceNumber_t initial_sequence;
add_persistence_guid(wdata.guid(), wdata.persistence_guid());
initial_sequence = get_last_notified(wdata.guid());
wp->start(wdata, initial_sequence, is_datasharing);
if (!is_same_process)
{
for (const Locator_t& locator : wp->remote_locators_shrinked())
{
getRTPSParticipant()->createSenderResources(locator);
}
}
if (is_datasharing)
{
if (datasharing_listener_->add_datasharing_writer(wdata.guid(),
m_att.durabilityKind == VOLATILE,
mp_history->m_att.maximumReservedCaches))
{
matched_writers_.push_back(wp);
EPROSIMA_LOG_INFO(RTPS_READER, "Writer Proxy " << wdata.guid() << " added to " << this->m_guid.entityId
<< " with data sharing");
}
else
{
EPROSIMA_LOG_ERROR(RTPS_READER, "Failed to add Writer Proxy " << wdata.guid()
<< " to " << this->m_guid.entityId
<< " with data sharing.");
{
// Release reader's lock to avoid deadlock when waiting for event (requiring mutex) to finish
guard.unlock();
assert(!guard.owns_lock());
wp->stop();
guard.lock();
}
matched_writers_pool_.push_back(wp);
return false;
}
// Intraprocess manages durability itself
if (VOLATILE == m_att.durabilityKind)
{
std::shared_ptr<ReaderPool> pool = datasharing_listener_->get_pool_for_writer(wp->guid());
SequenceNumber_t last_seq = pool->get_last_read_sequence_number();
if (SequenceNumber_t::unknown() != last_seq)
{
SequenceNumberSet_t sns(last_seq + 1);
send_acknack(wp, sns, wp, false);
wp->lost_changes_update(last_seq + 1);
}
}
else
{
// simulate a notification to force reading of transient changes
datasharing_listener_->notify(false);
}
}
else
{
matched_writers_.push_back(wp);
EPROSIMA_LOG_INFO(RTPS_READER, "Writer Proxy " << wp->guid() << " added to " << m_guid.entityId);
}
}
if (liveliness_lease_duration_ < c_TimeInfinite)
{
auto wlp = this->mp_RTPSParticipant->wlp();
if ( wlp != nullptr)
{
wlp->sub_liveliness_manager_->add_writer(
wdata.guid(),
liveliness_kind_,
liveliness_lease_duration_);
}
else
{
EPROSIMA_LOG_ERROR(RTPS_LIVELINESS,
"Finite liveliness lease duration but WLP not enabled, cannot add writer");
}
}
if (nullptr != listener)
{
listener->on_writer_discovery(this, WriterDiscoveryInfo::DISCOVERED_WRITER, wdata.guid(), &wdata);
}
#ifdef FASTDDS_STATISTICS
// notify monitor service so that the connectionlist for this entity
// could be updated
if (nullptr != mp_RTPSParticipant->get_connections_observer() && !m_guid.is_builtin())
{
mp_RTPSParticipant->get_connections_observer()->on_local_entity_connections_change(m_guid);
}
#endif //FASTDDS_STATISTICS
return true;
}
如果在StatefulReader::matched_writers_中没有查找到PDP发现的guid则创建一个新的WriterProxy对象保存EDP阶段需要的数据(EDP是reliable模式,在WriterProxy的构造中会创建heartbeat和acknack的定时器,还保存其他信息的用途TODO),让后将这个WriterProxy对象添加到StatefulReader::matched_writers_中。
{
//Create Events
ResourceEvent& event_manager = reader_->getEventResource();
auto heartbeat_lambda = [this]() -> bool
{
perform_heartbeat_response();
return false;
};
auto acknack_lambda = [this]() -> bool
{
return perform_initial_ack_nack();
};
heartbeat_response_ = new TimedEvent(event_manager, heartbeat_lambda, 0);
initial_acknack_ = new TimedEvent(event_manager, acknack_lambda, 0);
clear();
EPROSIMA_LOG_INFO(RTPS_READER, "Writer Proxy created in reader: " << reader_->getGuid().entityId);
}
接着创建发送资源sender resource。
bool StatefulWriter::matched_reader_add(
const ReaderProxyData& rdata)
{
using fastdds::rtps::network::external_locators::filter_remote_locators;
if (rdata.guid() == c_Guid_Unknown)
{
EPROSIMA_LOG_ERROR(RTPS_WRITER, "Reliable Writer need GUID_t of matched readers");
return false;
}
std::unique_lock<RecursiveTimedMutex> guard(mp_mutex);
std::unique_lock<LocatorSelectorSender> guard_locator_selector_general(locator_selector_general_);
std::unique_lock<LocatorSelectorSender> guard_locator_selector_async(locator_selector_async_);
// Check if it is already matched.
if (for_matched_readers(matched_local_readers_, matched_datasharing_readers_, matched_remote_readers_,
[this, &rdata](ReaderProxy* reader)
{
if (reader->guid() == rdata.guid())
{
EPROSIMA_LOG_INFO(RTPS_WRITER, "Attempting to add existing reader, updating information.");
if (reader->update(rdata))
{
filter_remote_locators(*reader->general_locator_selector_entry(),
m_att.external_unicast_locators, m_att.ignore_non_matching_locators);
filter_remote_locators(*reader->async_locator_selector_entry(),
m_att.external_unicast_locators, m_att.ignore_non_matching_locators);
update_reader_info(locator_selector_general_, true);
update_reader_info(locator_selector_async_, true);
}
return true;
}
return false;
}))
{
if (nullptr != mp_listener)
{
// call the listener without locks taken
guard_locator_selector_async.unlock();
guard_locator_selector_general.unlock();
guard.unlock();
mp_listener->on_reader_discovery(this, ReaderDiscoveryInfo::CHANGED_QOS_READER, rdata.guid(), &rdata);
}
#ifdef FASTDDS_STATISTICS
// notify monitor service so that the connectionlist for this entity
// could be updated
if (nullptr != mp_RTPSParticipant->get_connections_observer() && !m_guid.is_builtin())
{
mp_RTPSParticipant->get_connections_observer()->on_local_entity_connections_change(m_guid);
}
#endif //FASTDDS_STATISTICS
return false;
}
// Get a reader proxy from the inactive pool (or create a new one if necessary and allowed)
ReaderProxy* rp = nullptr;
if (matched_readers_pool_.empty())
{
size_t max_readers = matched_readers_pool_.max_size();
if (getMatchedReadersSize() + matched_readers_pool_.size() < max_readers)
{
const RTPSParticipantAttributes& part_att = mp_RTPSParticipant->getRTPSParticipantAttributes();
rp = new ReaderProxy(m_times, part_att.allocation.locators, this);
}
else
{
EPROSIMA_LOG_WARNING(RTPS_WRITER, "Maximum number of reader proxies (" << max_readers <<
") reached for writer " << m_guid);
return false;
}
}
else
{
rp = matched_readers_pool_.back();
matched_readers_pool_.pop_back();
}
// Add info of new datareader.
rp->start(rdata, is_datasharing_compatible_with(rdata));
filter_remote_locators(*rp->general_locator_selector_entry(),
m_att.external_unicast_locators, m_att.ignore_non_matching_locators);
filter_remote_locators(*rp->async_locator_selector_entry(),
m_att.external_unicast_locators, m_att.ignore_non_matching_locators);
locator_selector_general_.locator_selector.add_entry(rp->general_locator_selector_entry());
locator_selector_async_.locator_selector.add_entry(rp->async_locator_selector_entry());
if (rp->is_local_reader())
{
matched_local_readers_.push_back(rp);
EPROSIMA_LOG_INFO(RTPS_WRITER, "Adding reader " << rdata.guid() << " to " << this->m_guid.entityId
<< " as local reader");
}
else
{
if (rp->is_datasharing_reader())
{
matched_datasharing_readers_.push_back(rp);
EPROSIMA_LOG_INFO(RTPS_WRITER, "Adding reader " << rdata.guid() << " to " << this->m_guid.entityId
<< " as data sharing");
}
else
{
matched_remote_readers_.push_back(rp);
EPROSIMA_LOG_INFO(RTPS_WRITER, "Adding reader " << rdata.guid() << " to " << this->m_guid.entityId
<< " as remote reader");
}
}
update_reader_info(locator_selector_general_, true);
update_reader_info(locator_selector_async_, true);
if (rp->is_datasharing_reader())
{
if (nullptr != mp_listener)
{
// call the listener without locks taken
guard_locator_selector_async.unlock();
guard_locator_selector_general.unlock();
guard.unlock();
mp_listener->on_reader_discovery(this, ReaderDiscoveryInfo::DISCOVERED_READER, rdata.guid(), &rdata);
}
#ifdef FASTDDS_STATISTICS
// notify monitor service so that the connectionlist for this entity
// could be updated
if (nullptr != mp_RTPSParticipant->get_connections_observer() && !m_guid.is_builtin())
{
mp_RTPSParticipant->get_connections_observer()->on_local_entity_connections_change(m_guid);
}
#endif //FASTDDS_STATISTICS
return true;
}
bool is_reliable = rp->is_reliable();
if (is_reliable)
{
SequenceNumber_t min_seq = get_seq_num_min();
SequenceNumber_t last_seq = get_seq_num_max();
RTPSMessageGroup group(mp_RTPSParticipant, this, rp->message_sender());
// History not empty
if (min_seq != SequenceNumber_t::unknown())
{
(void)last_seq;
assert(last_seq != SequenceNumber_t::unknown());
assert(min_seq <= last_seq);
try
{
// Late-joiner
if (TRANSIENT_LOCAL <= rp->durability_kind() &&
TRANSIENT_LOCAL <= m_att.durabilityKind)
{
for (History::iterator cit = mp_history->changesBegin(); cit != mp_history->changesEnd(); ++cit)
{
// Holes are managed when deliver_sample(), sending GAP messages.
if (rp->rtps_is_relevant(*cit))
{
ChangeForReader_t changeForReader(*cit);
// If it is local, maintain in UNSENT status and add to flow controller.
if (rp->is_local_reader())
{
flow_controller_->add_old_sample(this, *cit);
}
// In other case, set as UNACKNOWLEDGED and expects the reader request them.
else
{
changeForReader.setStatus(UNACKNOWLEDGED);
}
rp->add_change(changeForReader, true, false);
}
}
}
else
{
if (rp->is_local_reader())
{
intraprocess_gap(rp, min_seq, mp_history->next_sequence_number());
}
else
{
// Send a GAP of the whole history.
group.add_gap(min_seq, SequenceNumberSet_t(mp_history->next_sequence_number()), rp->guid());
}
}
// Always activate heartbeat period. We need a confirmation of the reader.
// The state has to be updated.
periodic_hb_event_->restart_timer(std::chrono::steady_clock::now() + std::chrono::hours(24));
}
catch (const RTPSMessageGroup::timeout&)
{
EPROSIMA_LOG_ERROR(RTPS_WRITER, "Max blocking time reached");
}
}
if (rp->is_local_reader())
{
intraprocess_heartbeat(rp);
}
else
{
send_heartbeat_nts_(1u, group, disable_positive_acks_);
group.flush_and_reset();
}
}
else
{
// Acknowledged all for best-effort reader.
rp->acked_changes_set(mp_history->next_sequence_number());
}
EPROSIMA_LOG_INFO(RTPS_WRITER, "Reader Proxy " << rp->guid() << " added to " << this->m_guid.entityId << " with "
<< rdata.remote_locators().unicast.size() << "(u)-"
<< rdata.remote_locators().multicast.size() <<
"(m) locators");
if (nullptr != mp_listener)
{
// call the listener without locks taken
guard_locator_selector_async.unlock();
guard_locator_selector_general.unlock();
guard.unlock();
mp_listener->on_reader_discovery(this, ReaderDiscoveryInfo::DISCOVERED_READER, rdata.guid(), &rdata);
}
#ifdef FASTDDS_STATISTICS
// notify monitor service so that the connectionlist for this entity
// could be updated
if (nullptr != mp_RTPSParticipant->get_connections_observer() && !m_guid.is_builtin())
{
mp_RTPSParticipant->get_connections_observer()->on_local_entity_connections_change(m_guid);
}
#endif //FASTDDS_STATISTICS
return true;
}
RTPSWriter中更新reader的逻辑类似,PDP的发现如果在StatefulWriter的匹配的reader集合中没有找到则新创建一个ReaderProxy对象.
EntityID
服务发现的EntityID是标准固定,回调函数中通过固定EntityID来调用不同的监听对象。这些固定的Entity ID定义在EntityId_t.hpp中,主要有以下:
const EntityId_t c_EntityId_Unknown = ENTITYID_UNKNOWN;
const EntityId_t c_EntityId_SPDPReader = ENTITYID_SPDP_BUILTIN_RTPSParticipant_READER;
const EntityId_t c_EntityId_SPDPWriter = ENTITYID_SPDP_BUILTIN_RTPSParticipant_WRITER;
const EntityId_t c_EntityId_SEDPPubWriter = ENTITYID_SEDP_BUILTIN_PUBLICATIONS_WRITER;
const EntityId_t c_EntityId_SEDPPubReader = ENTITYID_SEDP_BUILTIN_PUBLICATIONS_READER;
const EntityId_t c_EntityId_SEDPSubWriter = ENTITYID_SEDP_BUILTIN_SUBSCRIPTIONS_WRITER;
const EntityId_t c_EntityId_SEDPSubReader = ENTITYID_SEDP_BUILTIN_SUBSCRIPTIONS_READER;
const EntityId_t c_EntityId_RTPSParticipant = ENTITYID_RTPSParticipant;
const EntityId_t c_EntityId_WriterLiveliness = ENTITYID_P2P_BUILTIN_RTPSParticipant_MESSAGE_WRITER;
const EntityId_t c_EntityId_ReaderLiveliness = ENTITYID_P2P_BUILTIN_RTPSParticipant_MESSAGE_READER;
const EntityId_t participant_stateless_message_writer_entity_id = ENTITYID_P2P_BUILTIN_PARTICIPANT_STATELESS_WRITER;
const EntityId_t participant_stateless_message_reader_entity_id = ENTITYID_P2P_BUILTIN_PARTICIPANT_STATELESS_READER;
const EntityId_t c_EntityId_TypeLookup_request_writer = ENTITYID_TL_SVC_REQ_WRITER;
const EntityId_t c_EntityId_TypeLookup_request_reader = ENTITYID_TL_SVC_REQ_READER;
const EntityId_t c_EntityId_TypeLookup_reply_writer = ENTITYID_TL_SVC_REPLY_WRITER;
const EntityId_t c_EntityId_TypeLookup_reply_reader = ENTITYID_TL_SVC_REPLY_READER;