前言
上一篇使用的是柳树车库环境,实现完整建图工作比较复杂,所以准备新建一个简单点的环境,在此基础上实现后面的自定义机器人定位与导航。
一、新建环境
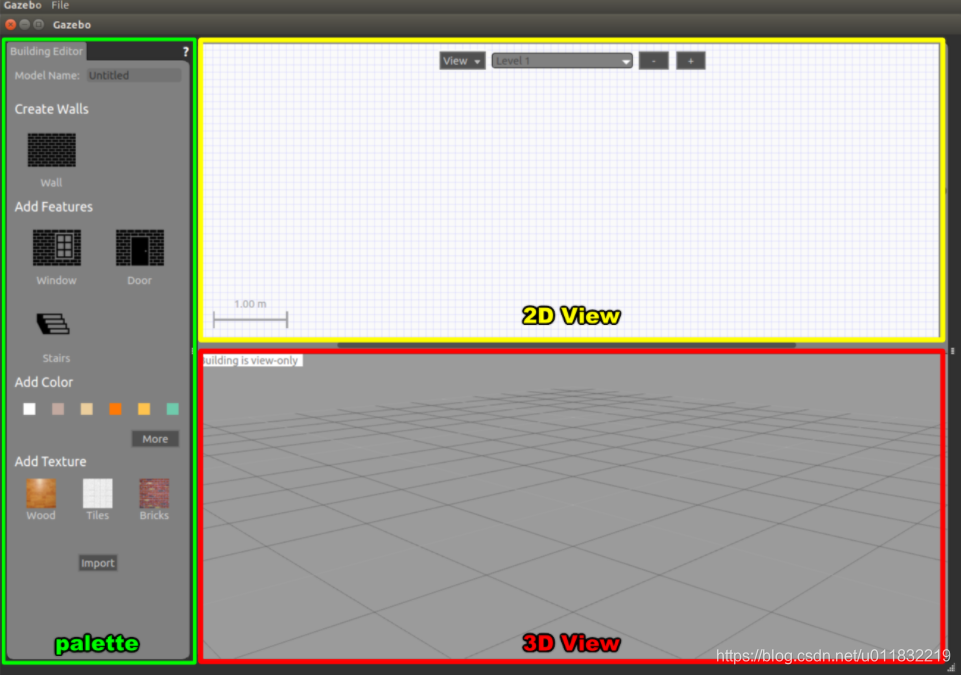
启动gazebo,按下Ctrl+B键,进入编辑器,界面如下:
编辑器由三部分组成:
(1) Palette,在这里可以选择建筑的特征和材料。
(2) 2D View,可以导入floor计划嵌入墙,窗,门和台阶。
(3) 3D View,建筑物的预览,能够设计建筑物不同部分的颜色和纹理。
下图是按照我家房子户型,进行绘制的。绘制完成,选择File-save as菜单,进行保存,效果如下: