前言
NDT算法因其具有较强的鲁棒性而被广泛的应用,下面这些项目中的点云配准算法采用的都是NDT:
Autoware
hdl_graph_slam
hdl_localization
可见该配准方法的重要性,下面我将对这个算法进行分析.
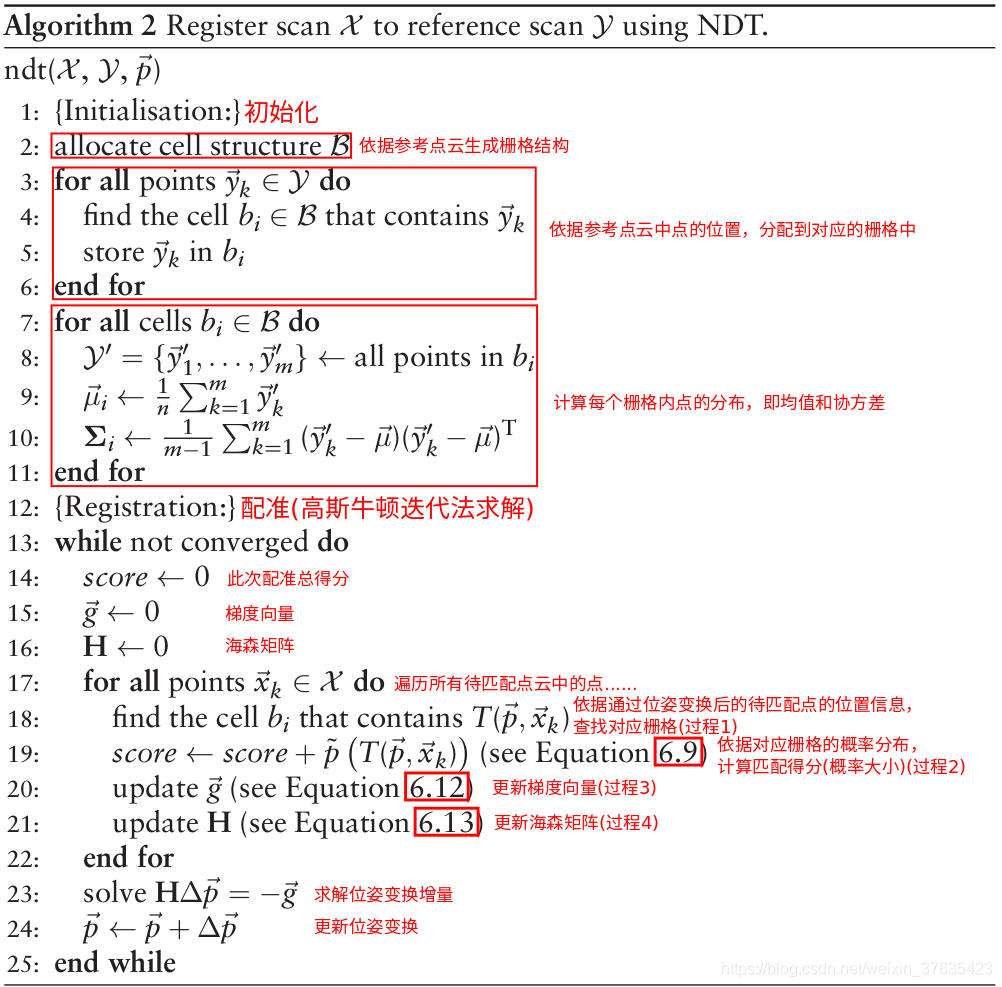
算法流程
依据上述伪码流程可以看出,该算法主要的思路就是将目标点云刻画成多个概率分布,然后通过位姿变换关系将待配准点云转换到目标点云坐标系下,计算转换后待配准点云的总概率,并将此概率的负值作为目标函数,通过高斯牛顿迭代法优化该目标函数以求获得负的最小概率值(即最大概率值).高斯牛顿迭代公式见第23行,由梯度向量、海森矩阵和待求的位姿增量组成,因此最后整个NDT算法可以简单的归为求解梯度向量、求解海森矩阵和求解位姿增量三个主要过程.下面主要分析较复杂的梯度向量和海森矩阵的求解.
目标函数(对应伪码中的 s c o r e score score)
总概率计算如下:
为了能使用高斯牛顿迭代法,需要将目标函数转换成求最小值,而我们的目标是要求取公式(6.5)的最大值,因此可通过下式进行转换,将求取公式(6.5)的最大值转换成求取公式(6.6)的最小值:
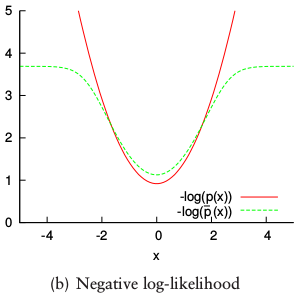
假设每个栅格内点的分布呈正态分布,按公式(6.6)对一个正态分布的PDF求取-log值会出现下图红线所示的没有最大边界问题,该问题会使得噪声对优化结果产生很大影响(如果噪声很大,-log值会非常大,导致优化算法主要的目标是去优化噪声了,结果将会被严重影响)
为了抑制噪声影响,提出了如下正态分布与均匀分布结合的概率分布模型,可以实现图中绿线所示的有边界的效果:
其中常数
c
1
,
c
2
c_{1}, c_{2}
c1,c2 可以通过要求
p
ˉ
(
x
⃗
)
\bar{p}(\vec{x})
pˉ(x) 的概率质量在一个单元格跨越的空间内等于1来确定。公式(6.7)没有简单的一阶、二阶微分.但通过观察上图发现公式(6.7)可以被下式近似:
式中的
d
1
,
d
2
,
d
3
d_{1}, d_{2}, d_{3}
d1,d2,d3 可通过令
x
=
0
,
x
=
σ
,
x
=
∞
x=0,x=\sigma, x=\infty
x=0,x=σ,x=∞建立方程求解,结果为:
该式具有简单的微分方程.基于高斯近似后的概率分布函数如下:
于是最终的目标函数由(6.6)转换成了下式:
注意:
虽然目标函数已确定,但目标函数中的协方差矩阵
Σ
\Sigma
Σ 的确定需要采取一些策略.因为目标函数中需要求取协方差矩阵的逆
Σ
−
1
\Sigma ^{-1}
Σ−1 ,如果栅格中的点是共面或共线的,协方差矩阵是奇异的,无法求取逆矩阵,因此由三维空间中三个及以下的点来求取协方差矩阵必然是奇异的.为了解决该问题,NDT算法中的PDF计算要求至少需要5个点,并且当
Σ
\Sigma
Σ 几乎为奇异值时,就对该协方差进行调整,调整的策略为: 如果
Σ
\Sigma
Σ 最大的特征值
λ
3
\lambda_{3}
λ3 比
λ
1
,
λ
2
\lambda_{1}, \lambda_{2}
λ1,λ2 大100倍时,令
λ
1
=
λ
2
=
λ
3
/
100
\lambda_{1} = \lambda_{2} = \lambda_{3}/100
λ1=λ2=λ3/100 ,然后再令
Σ
=
V
∧
′
V
\Sigma = \mathbf{V}\boldsymbol{\wedge}^{'}\mathbf{V}
Σ=V∧′V,其中
V
\mathbf{V}
V 包含了
Σ
\Sigma
Σ 的特征向量,
∧
′
\wedge^{'}
∧′ 的计算如下:
至此确定了NDT算法的目标函数.








梯度向量的求解
令
可得梯度向量:

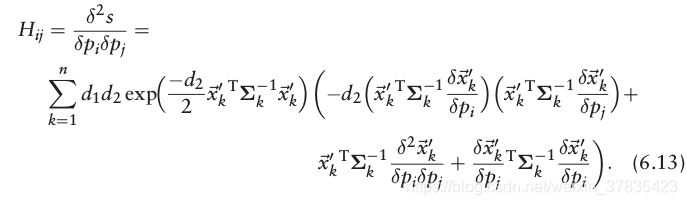
海森矩阵的求解
示例
从上面的分析可知,NDT算法主要的任务是对梯度向量和海森矩阵的求解,而从公式(6.12)和(6.13)可以看出,针对不同场景,主要的差异体现
δ
x
⃗
k
′
δ
p
i
\frac{\delta\vec{\mathbf{x}}_{k}^{'}}{\delta\mathbf{p}_{i}}
δpiδxk′和
δ
2
x
⃗
k
′
δ
p
i
δ
p
j
\frac{\delta^{2}\vec{\mathbf{x}}_{k}^{'}}{\delta\mathbf{p}_{i}\delta\mathbf{p}_{j}}
δpiδpjδ2xk′.下面以2D场景为例对这两项进行解算.
假设位姿变换参数为
p
⃗
=
(
t
x
,
t
y
,
ϕ
)
\vec{\mathbf{p}}=(t_{x},t_{y},\phi)
p=(tx,ty,ϕ),待转换的点为
x
⃗
=
(
x
1
,
x
2
)
\vec{\mathbf{x}} = (x_{1}, x_{2})
x=(x1,x2),则转换位姿变换方程如下:
则
δ
x
⃗
k
′
δ
p
i
\frac{\delta\vec{\mathbf{x}}_{k}^{'}}{\delta\mathbf{p}_{i}}
δpiδxk′结果为:
δ
2
x
⃗
k
′
δ
p
i
δ
p
j
\frac{\delta^{2}\vec{\mathbf{x}}_{k}^{'}}{\delta\mathbf{p}_{i}\delta\mathbf{p}_{j}}
δpiδpjδ2xk′的结果为:
对于3D场景的示例可查看论文,与二维场景相比,只对三维位姿的求导存在差异.



PCL实现(直接链接PCL库)
2D场景实现
3D场景实现
测试直接看官方demo吧,很简单.
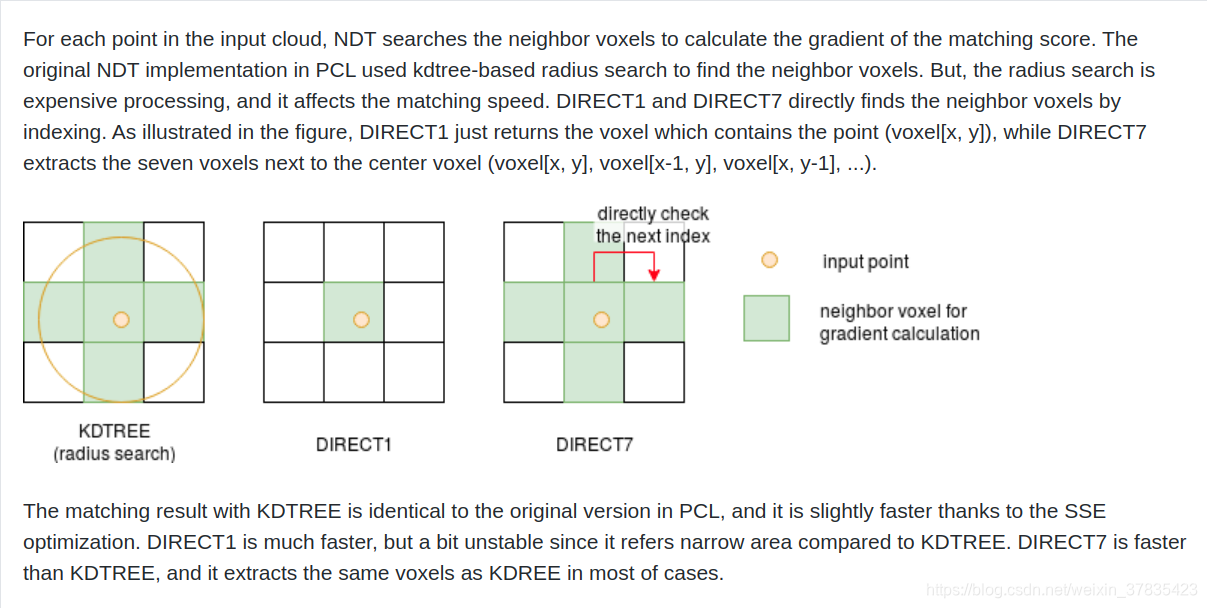
NDT改进版本
改进1: 引入cpu多线程支持OpenMP
改进2: 搜索速度提升,提升策略如下