前言
互联网时代,技术的进步,文化的传播,自由的表达,让每一个个体都有了闪光的机会。形形色色的极客,各种 DIY,关注技术时尚,展示自己创意,也是新时代的赏心乐事。
工业机器人,高自由度的机械手臂,明晃晃的高科技啊。拥有一台灵活控制的机械手,应该是极客们的幸福事情。
现在机会来了,Dobot 团队开发了一款桌面型机械手,可以摆在书桌上,小巧玲珑,控制简单灵活。能做什么,就等你开发了。
开箱
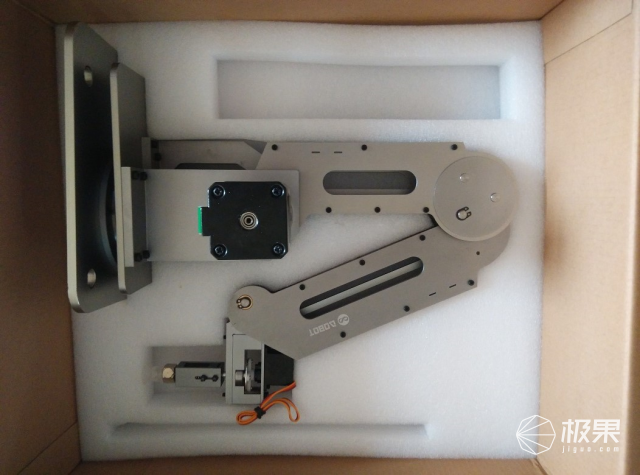
不多说,拆箱!看看全家福吧。

不得不提是包装格外有创意,让人想起来千层饼。看到上图那厚厚的一摞泡沫塑料了吗?看看拆箱时的情景吧。
给未出壳的机械手来个特写吧!机械手金属表面的处理很有质感。
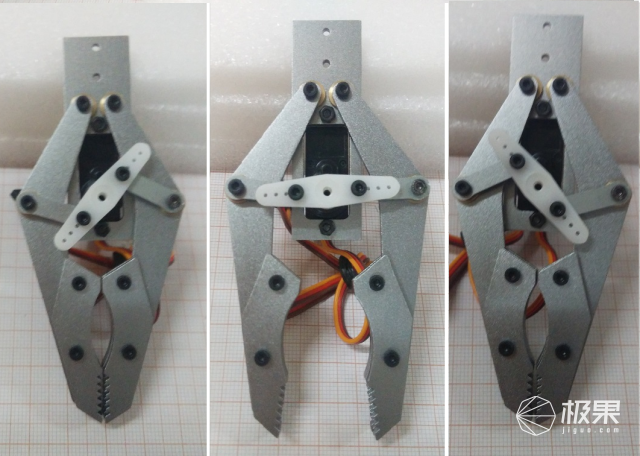
抓手设计的很巧妙,抓紧状态->电机旋转->松开状态->电机旋转->抓紧状态,这期间电机不需要反向旋转。
很用心的设计,连接线上用标签扎线,既可以提示,又可以扎线。

装配
Dobot 配件有机械臂主体、电源线、控制器、USB 线、爪子和激光头等配件,机械臂由三个电机控制。
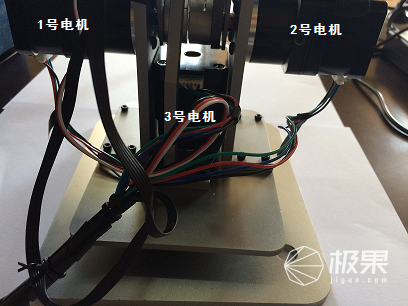
控制器的每个接线都有标签,其中1号电机接 Stepper_R 电机,2号电机接 Stepper_L 电机,3号电机接 Stepper_rot 电机。
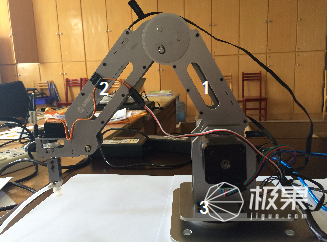
Dobot 主体有三个臂可以运动,分别为图2-2中的1、2、3表示。其中1号臂由1号电机控制,2号臂由2号电机控制,3号臂由3号电机控制。
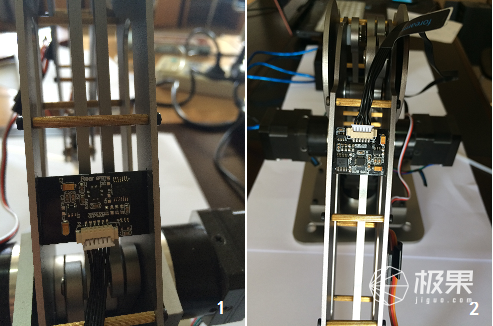
为了获得当前机械臂的姿态,需要安装传感器,1号臂安装标签为 rear arm 的传感器,2号臂安装标签为 Forearm 的传感器(注意:由于2号臂较窄,需要拆卸2号臂才可以装入)
控制器有两个接口,分别为 USB 接口和电源接口,插入电源和 USB 接口,则带有气泵功能的机械手臂安装完成。插好 Dobot 机械手上的电机、传感器连接控制器,然后通过 USB 与电脑相连。
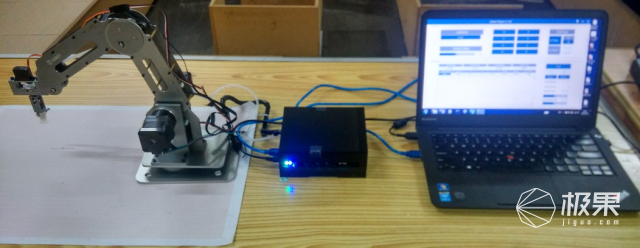
使用
装配完成,接下来可以通电操作啦。没上电之前,机械手软软的,先让机械手摆放一个Pose,打开电源开关。控制器立刻接管机械手的