Arduino是一个开放源码的电子原型平台,它可以让你用简单的硬件和软件来创建各种互动的项目。Arduino的核心是一个微控制器板,它可以通过一系列的引脚来连接各种传感器、执行器、显示器等外部设备。Arduino的编程是基于C/C++语言的,你可以使用Arduino IDE(集成开发环境)来编写、编译和上传代码到Arduino板上。Arduino还有一个丰富的库和社区,你可以利用它们来扩展Arduino的功能和学习Arduino的知识。

Arduino的特点是:
1、开放源码:Arduino的硬件和软件都是开放源码的,你可以自由地修改、复制和分享它们。
2、易用:Arduino的硬件和软件都是为初学者和非专业人士设计的,你可以轻松地上手和使用它们。
3、便宜:Arduino的硬件和软件都是非常经济的,你可以用很低的成本来实现你的想法。
4、多样:Arduino有多种型号和版本,你可以根据你的需要和喜好来选择合适的Arduino板。
5、创新:Arduino可以让你用电子的方式来表达你的创意和想象,你可以用Arduino来制作各种有趣和有用的项目,如机器人、智能家居、艺术装置等。
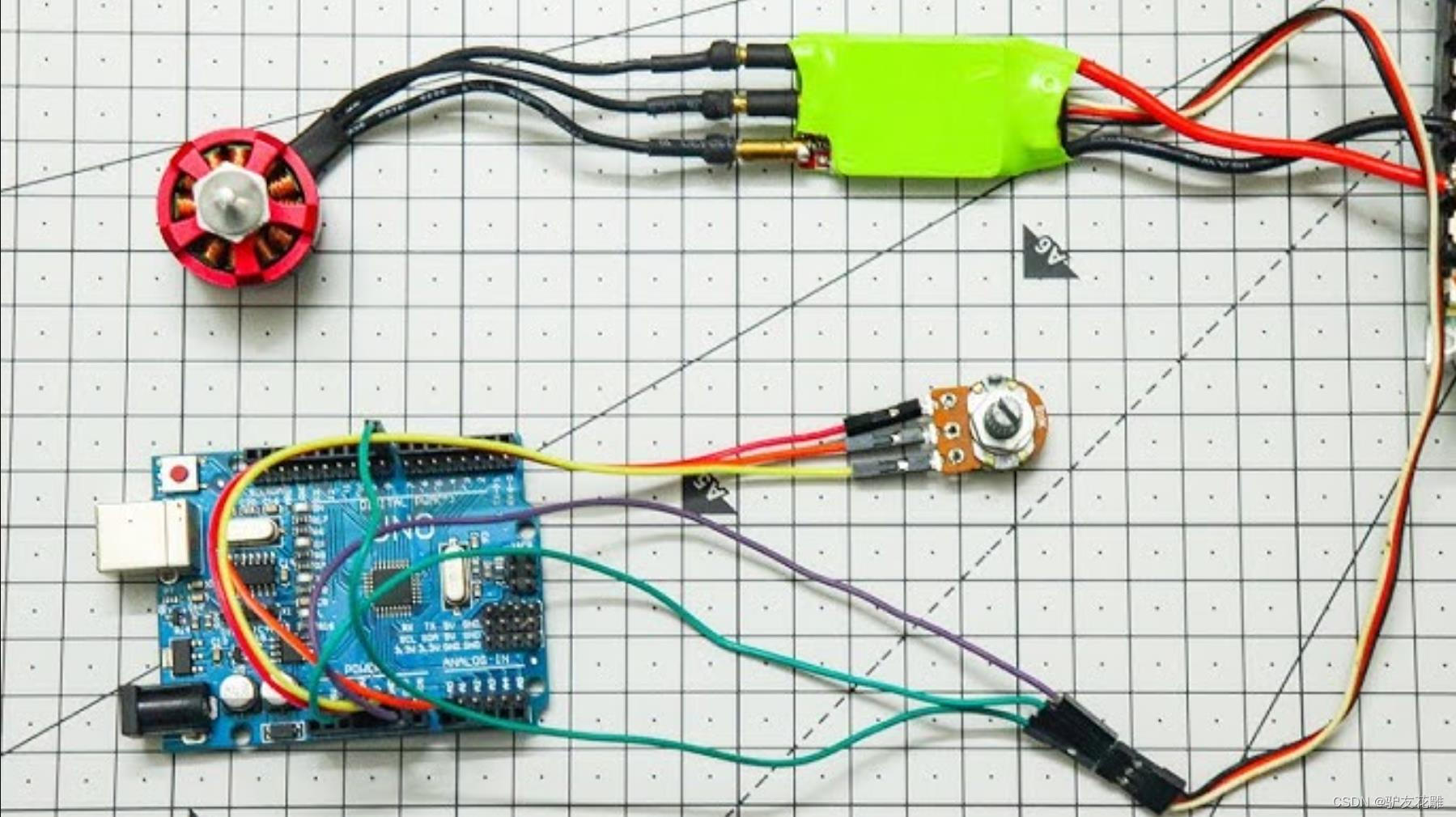
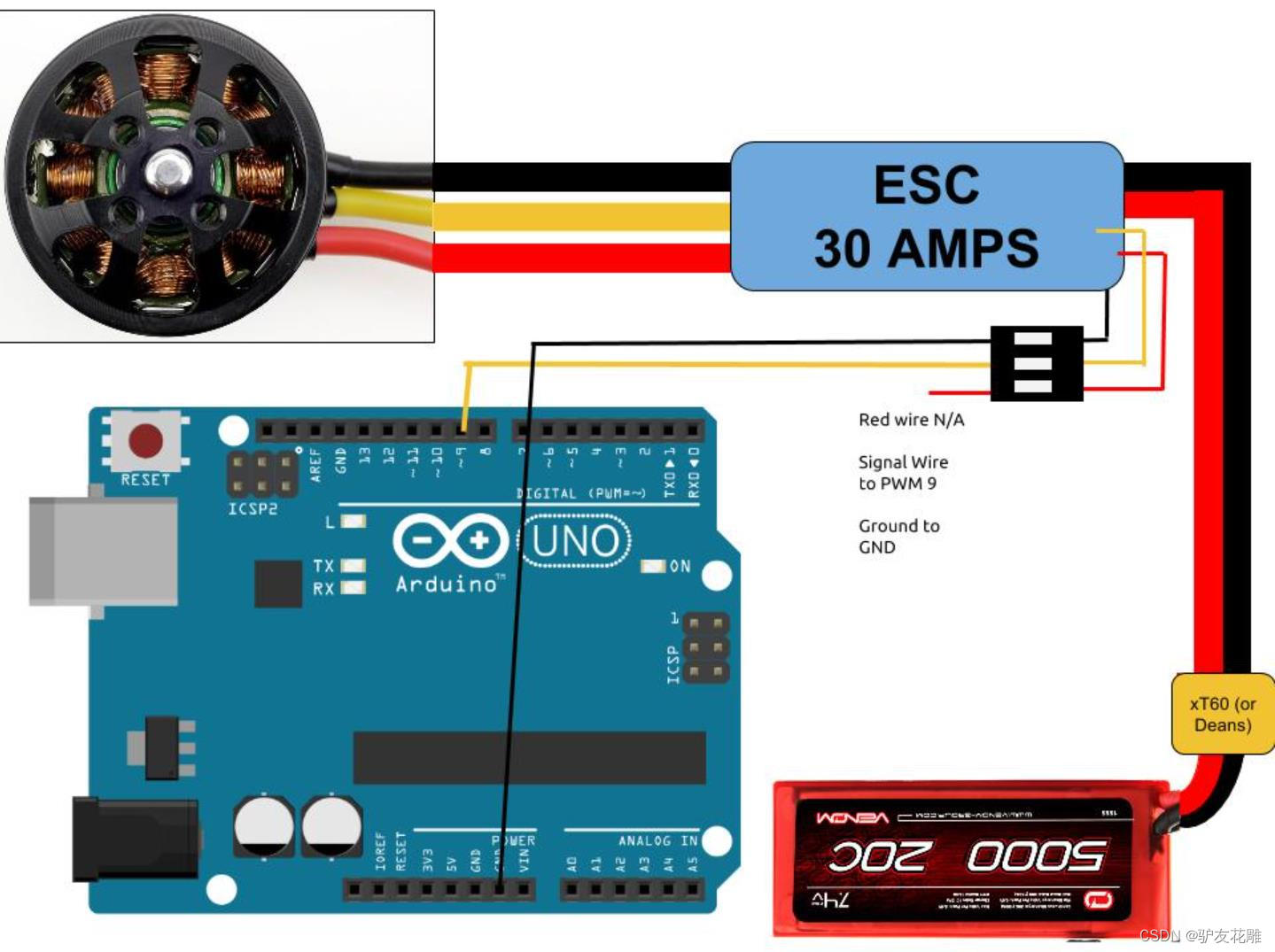
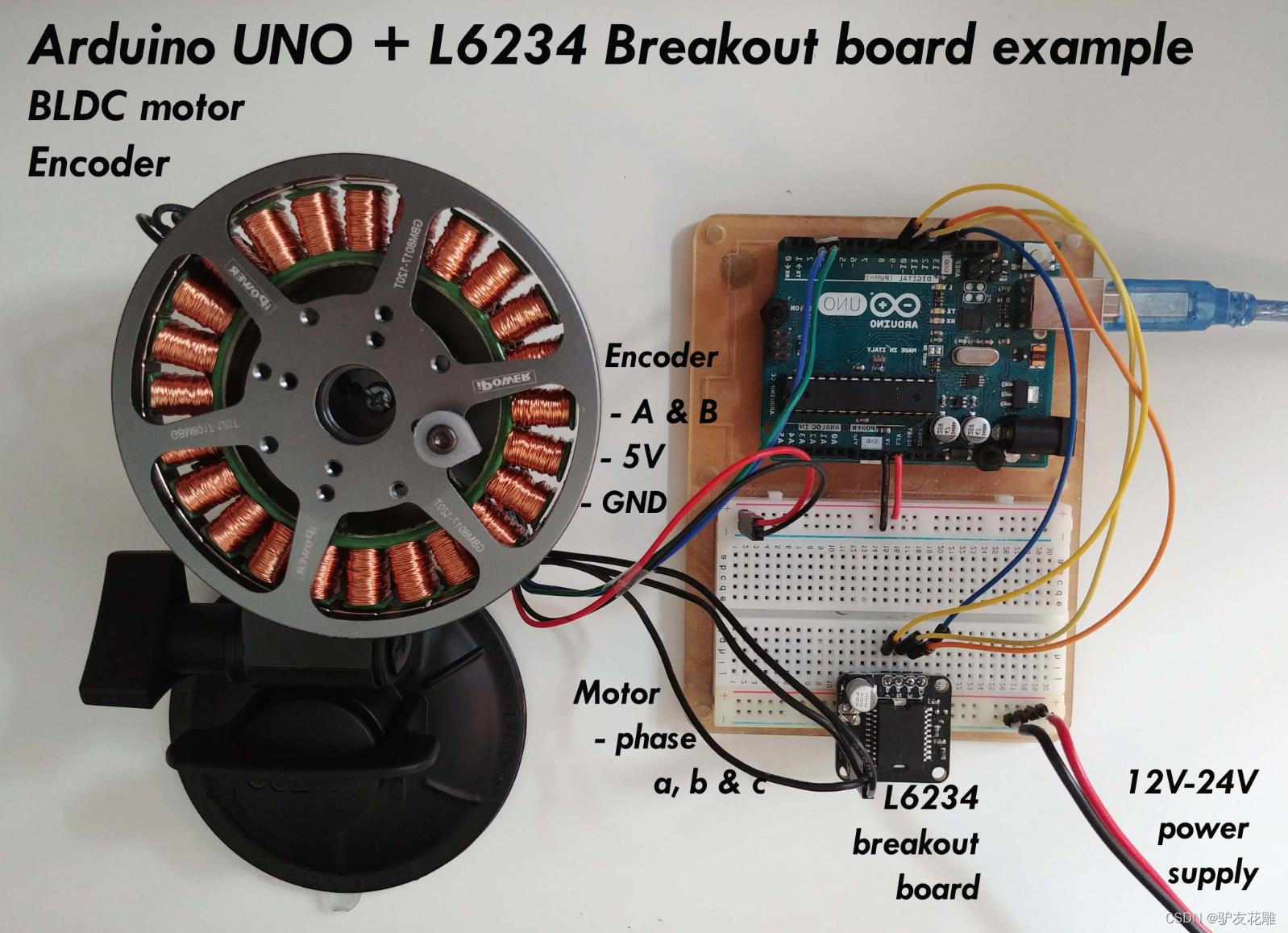
Arduino BLDC(无刷直流电机)是指使用Arduino平台来控制无刷直流电机(Brushless DC Motor)的一系列技术和应用。无刷直流电机是一种先进的电机技术,它利用电子换向来替代传统的碳刷和换向器,从而提供更高效、更可靠和更低维护成本的电机驱动解决方案。以下是对Arduino BLDC的全面详细科学解释:

1、主要特点:
无刷设计:BLDC电机没有碳刷和换向器,消除了电刷磨损和电磁干扰,提高了电机的寿命和效率。
电子换向:通过电子控制器实现换向,响应速度快,控制精度高。
高效率和高扭矩:BLDC电机具有高效率和高扭矩密度,适合需要快速响应和大扭矩的应用。
低维护:由于没有物理接触的电刷和换向器,维护需求低。
良好的控制性能:BLDC电机可以精确控制速度和位置,适合闭环控制系统。
Arduino平台兼容性:利用Arduino的灵活性和丰富的库支持,可以方便地实现对BLDC电机的控制。
2、应用场景:
机器人:在机器人技术中,BLDC电机用于精确控制机器人的关节和运动。
无人机:无人机(UAV)使用BLDC电机来实现稳定和高效的飞行。
电动车辆:电动汽车和电动自行车利用BLDC电机提供动力和扭矩。
工业自动化:在自动化设备中,BLDC电机用于精确控制机械臂和传送带。
家用电器:一些高性能家电,如洗衣机和空调,使用BLDC电机来提高能效和性能。
医疗设备:医疗设备中的电机驱动,如手术工具和诊断设备,也采用BLDC电机。
3、需要注意的事项:
控制算法:需要合适的控制算法,如FOC(Field Oriented Control),来实现BLDC电机的最佳性能。
驱动器选择:根据电机的电压和电流规格选择合适的驱动器。
编码器集成:为了实现精确的速度和位置控制,可能需要集成编码器。
软件工具:使用Arduino IDE或其他软件工具来编写和上传控制代码。
电源管理:确保电源供应稳定且符合电机的工作要求。
热管理:设计合适的散热方案,以防止电机和驱动器过热。
电磁兼容性:注意电磁兼容性设计,减少对其他设备的干扰。
安全考虑:设计时要考虑人员安全和设备安全的保护措施。
通过上述详细解释,我们可以看到Arduino BLDC电机控制系统是一种高效、灵活且应用广泛的技术解决方案。在设计和实施过程中,需要注意选择合适的控制算法、驱动器、编码器以及考虑电源管理、热管理和电磁兼容性等关键因素。
1、主要特点:
TMC2209 是一款集成了电机驱动和先进电流控制的芯片,专门针对 BLDC 电机的应用进行了优化。
该驱动模块采用了 Trinamic 公司独有的 StealthChop2 电流控制技术,可以实现超静音的电机驱动。
TMC2209 内置了丰富的保护功能,如过电流保护、过温保护、开路保护等,能够有效保护电机和驱动电路。
该驱动模块支持多种控制模式,包括电流模式、速度模式和位置模式,满足不同应用场景的需求。
体积小巧,可轻松集成到 Arduino 等微控制器平台上,非常适合嵌入式应用。

2、应用场景:
工业机器人:TMC2209 驱动模块可以为机械臂、关节驱动等提供静音、高性能的电机控制解决方案。
3D 打印机:该驱动模块可以实现打印头、挤出机等部件的精准位置和速度控制,提高打印质量。
医疗设备:TMC2209 驱动模块可用于各类医疗设备的电机驱动,如手术机器人、康复训练设备等。
智能家居:TMC2209 驱动模块可应用于智能窗帘、智能门锁等家用电机驱动领域,实现安静、精准的控制。
无人机和机器人:该驱动模块可为无人机、服务机器人的电机驱动提供静音、高响应的控制方案。
3、需要注意的事项:
电机匹配:需确保所使用的 BLDC 电机的功率、转矩等参数与 TMC2209 驱动模块的要求相匹配,以获得最佳性能。
接线与供电:TMC2209 驱动模块的电源电压、电流承载能力需与 BLDC 电机相匹配,同时接线需遵循正确的相序。
控制模式选择:根据具体应用场景,合理选择电流模式、速度模式或位置模式,并调整对应的控制参数。
散热措施:高功率 BLDC 电机在长时间运转时会产生较多热量,需采取适当的散热措施以确保系统稳定运行。
编程与调试:在 Arduino 上编程控制 TMC2209 驱动模块时,需要根据实际情况调整各项参数,如电流限制、微步细分等,以获得最佳的控制效果。
总的来说,Arduino BLDC 搭配 TMC2209 驱动模块能够为 BLDC 电机提供高性能、低噪音的控制解决方案,在工业机器人、3D 打印机、医疗设备等领域都有广泛的应用前景。在实际应用时,需要重点关注电机匹配、接线供电、控制模式选择、散热措施以及编程调试等关键因素,以发挥出这一方案的全部优势。
当使用Arduino控制BLDC电机时,结合TMC2209驱动模块,以下是几个实际运用程序参考代码案例,并附有要点解读:
1、基本的BLDC电机控制
#include <TMCStepper.h>
TMC2209Stepper driver;
void setup() {
driver.begin();
driver.toff(4);
driver.rms_current(600); // 设置电机电流
driver.microsteps(16); // 设置微步数
driver.en_pwm_mode(true); // 启用PWM模式
}
void loop() {
// 顺时针旋转
driver.shaft(1);
delay(2000);
// 反时针旋转
driver.shaft(0);
delay(2000);
// 停止
driver.shaft(2);
delay(2000);
}
要点解读:
在这个案例中,我们使用了TMCStepper库来控制TMC2209驱动模块。
在setup()函数中,我们初始化了驱动器,并设置了一些参数。
driver.begin()用于启动驱动器。
driver.toff(4)设置电机的时间限制,这里设置为4。
driver.rms_current(600)设置电机的电流,这里设置为600mA。
driver.microsteps(16)设置电机的微步数,这里设置为16。
driver.en_pwm_mode(true)启用PWM模式,以获取更好的电机性能。
在loop()函数中,我们通过调用driver.shaft()函数来控制电机的旋转方向。
driver.shaft(1)表示顺时针旋转,driver.shaft(0)表示逆时针旋转,driver.shaft(2)表示停止。
使用延迟(delay)来控制电机旋转的时间间隔。
2、使用传感器反馈的速度控制
#include <TMCStepper.h>
#include <Encoder.h>
TMC2209Stepper driver;
Encoder encoder(A0, A1);
#define TARGET_SPEED 1000 // 目标速度(脉冲/秒)
void setup() {
driver.begin();
driver.toff(4);
driver.rms_current(600); // 设置电机电流
driver.microsteps(16); // 设置微步数
driver.en_pwm_mode(true); // 启用PWM模式
}
void loop() {
int encoderTicks = encoder.read();
int currentSpeed = encoderTicks * 1000 / 2; // 计算当前速度(脉冲/秒)
int error = TARGET_SPEED - currentSpeed;
int pidOutput = error * 0.1; // PID系数
driver.shaft(pidOutput);
delay(10);
}
要点解读:
在这个案例中,我们结合了TMCStepper库和Encoder库来实现速度控制。
在setup()函数中,我们初始化了驱动器,并设置了一些参数,与案例1相同。
TARGET_SPEED表示目标速度,单位为脉冲/秒。
在loop()函数中,我们使用编码器的脉冲数来计算当前速度(currentSpeed)。
计算速度误差(error),然后通过PID控制算法计算出PID输出(pidOutput)。
调用driver.shaft()函数将PID输出作为电机的速度控制信号。
使用延迟(delay)来控制循环时间。
3、简单的 BLDC 电机控制:
#include <TMC2209Stepper.h>
// 定义 TMC2209 引脚
#define UART_RX 10
#define UART_TX 11
#define ENABLE 12
// 创建 TMC2209 对象
TMC2209Stepper driver(UART_RX, UART_TX, 0.11f, ENABLE);
void setup() {
// 初始化 TMC2209 驱动
driver.begin();
driver.toff(4);
driver.rms_current(1000); // 电流设置为 1A
driver.microsteps(16);
}
void loop() {
// 顺时针旋转
driver.shaft_dir(1);
driver.move(4000);
delay(2000);
// 逆时针旋转
driver.shaft_dir(0);
driver.move(4000);
delay(2000);
}
要点解读:
使用 TMC2209Stepper 库控制 TMC2209 驱动模块。
设置 UART 引脚、使能引脚,并创建 TMC2209Stepper 对象。
在 setup() 函数中初始化驱动,设置电流和微步模式。
在 loop() 函数中,通过设置旋转方向和移动步数控制 BLDC 电机的旋转。
4、基于编码器的 BLDC 电机闭环控制:
#include <TMC2209Stepper.h>
#include <Encoder.h>
// 定义 TMC2209 和编码器引脚
#define UART_RX 10
#define UART_TX 11
#define ENABLE 12
#define ENCODER_A 2
#define ENCODER_B 3
// 创建 TMC2209 和 Encoder 对象
TMC2209Stepper driver(UART_RX, UART_TX, 0.11f, ENABLE);
Encoder encoder(ENCODER_A, ENCODER_B);
// 控制参数
float targetSpeed = 100; // 目标转速(RPM)
float currentSpeed = 0;
float Kp = 0.1, Ki = 0.01, Kd = 0.001;
float lastError = 0;
float integral = 0;
void setup() {
// 初始化 TMC2209 驱动
driver.begin();
driver.toff(4);
driver.rms_current(1000); // 电流设置为 1A
driver.microsteps(16);
}
void loop() {
// 读取编码器速度
currentSpeed = calculateSpeed(encoder.read());
// 计算速度误差并使用 PID 算法
float error = targetSpeed - currentSpeed;
integral += error;
float speed = Kp * error + Ki * integral + Kd * (error - lastError);
lastError = error;
// 设置电机速度
driver.shaft_dir(speed >= 0 ? 1 : 0);
driver.move(abs(speed));
delay(10);
}
// 计算电机转速(RPM)
float calculateSpeed(int position) {
static long lastPosition = 0;
static unsigned long lastTime = 0;
long deltaPosition = position - lastPosition;
unsigned long deltaTime = millis() - lastTime;
lastPosition = position;
lastTime = millis();
return (float)deltaPosition / deltaTime * 60000.0 / 16.0; // 返回 RPM
}
要点解读:
使用 TMC2209Stepper 库控制 TMC2209 驱动模块,使用 Encoder 库读取电机编码器数据。
在 setup() 函数中初始化驱动,设置电流和微步模式。
在 loop() 函数中,读取编码器的位置信息,计算当前转速,并使用 PID 算法控制电机速度。
通过设置电机旋转方向和速度,实现 BLDC 电机的闭环速度控制。
5、结合霍尔传感器的 BLDC 电机六步换相控制:
#include <TMC2209Stepper.h>
// 定义 TMC2209 和霍尔传感器引脚
#define UART_RX 10
#define UART_TX 11
#define ENABLE 12
#define HALL_A 2
#define HALL_B 3
#define HALL_C 4
// 创建 TMC2209 对象
TMC2209Stepper driver(UART_RX, UART_TX, 0.11f, ENABLE);
// 霍尔传感器状态
int hallState = 0;
void setup() {
// 初始化 TMC2209 驱动
driver.begin();
driver.toff(4);
driver.rms_current(1000); // 电流设置为 1A
driver.microsteps(16);
// 配置霍尔传感器引脚
pinMode(HALL_A, INPUT_PULLUP);
pinMode(HALL_B, INPUT_PULLUP);
pinMode(HALL_C, INPUT_PULLUP);
}
void loop() {
// 读取霍尔传感器状态
int a = digitalRead(HALL_A);
int b = digitalRead(HALL_B);
int c = digitalRead(HALL_C);
hallState = (a << 2) | (b << 1) | c;
// 根据霍尔传感器状态设置电机换相
switch (hallState) {
case 0b100: driver.shaft_dir(1); driver.move(4000); break; // 正转
case 0b101: driver.shaft_dir(0); driver.move(4000); break; // 反转
case 0b001: driver.shaft_dir(1); driver.move(4000); break;
case 0b011: driver.shaft_dir(0); driver.move(4000); break;
case 0b010: driver.shaft_dir(1); driver.move(4000); break;
case 0b110: driver.shaft_dir(0); driver.move(4000); break;
}
delay(10);
}
要点解读:
使用 TMC2209Stepper 库控制 TMC2209 驱动模块,同时使用三个数字引脚读取霍尔传感器状态。
在 setup() 函数中初始化驱动,设置电流和微步模式,并配置霍尔传感器引脚。
在 loop() 函数中,读取霍尔传感器状态,根据不同状态设置电机的旋转方向和步数,实现 BLDC 电机的六步换相控制。
该方案不需要复杂的算法,只需根据霍尔传感器的状态切换电机的相位即可实现 BLDC 电机的控制。
注意,以上案例只是为了拓展思路,仅供参考。它们可能有错误、不适用或者无法编译。您的硬件平台、使用场景和Arduino版本可能影响使用方法的选择。实际编程时,您要根据自己的硬件配置、使用场景和具体需求进行调整,并多次实际测试。您还要正确连接硬件,了解所用传感器和设备的规范和特性。涉及硬件操作的代码,您要在使用前确认引脚和电平等参数的正确性和安全性。