简述:
通过python实现图像中圆形轮廓的检测
选择opencv中的cv2.HoughCircles函数
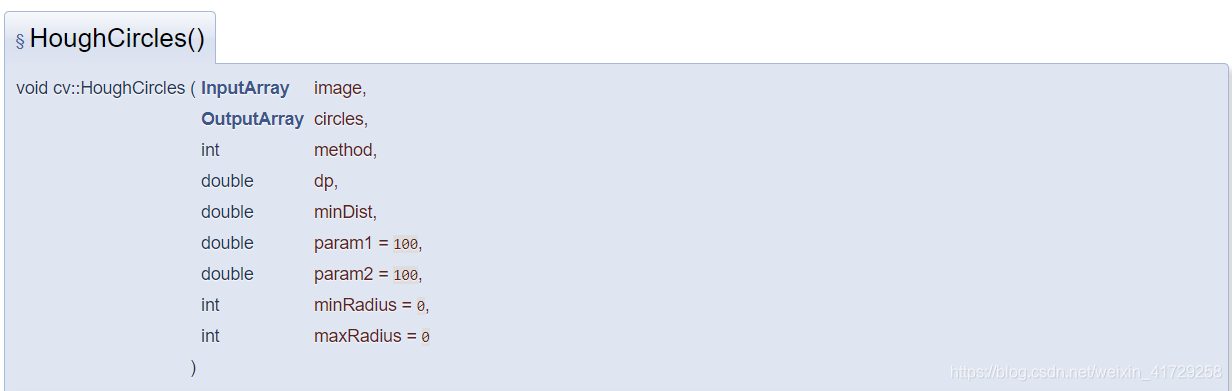
参量
image 8位单通道灰度输入图像。
circles 找到的圆的输出向量。每个向量都编码为3元素浮点向量(x,y,radius)
method 检测方法,请参见cv :: HoughModes。当前,唯一实现的方法是HOUGH_GRADIENT
dp 累加器分辨率与图像分辨率的反比。例如,如果dp = 1,则累加器具有与输入图像相同的分辨率。如果dp = 2,则累加器的宽度和高度是其一半。
minDist 检测到的圆心之间的最小距离。如果参数太小,则除了真实的圆圈外,还可能会错误地检测到多个邻居圆圈。如果太大,可能会错过一些圆圈。
param1 第一个方法特定的参数。对于CV_HOUGH_GRADIENT,它是传递给Canny边缘检测器的两个阈值中的较高阈值(较低的阈值则小两倍)。
param2 第二种方法特定的参数。在CV_HOUGH_GRADIENT的情况下,它是检测阶段圆心的累加器阈值。它越小,可以检测到的假圆圈越多。与较大的累加器值相对应的圆将首先返回。
minRadius 最小圆半径。
maxRadius 最大圆半径。
python实现如下:
"""
Linyan--5/