目录
关键词
嵌入式、C语言、autosar、OS、BSW、UDS、diagnostic
平台说明
| 项目 | Value |
|---|---|
| OS | autosar OS |
| autosar厂商 | vector |
| 芯片厂商 | TI |
| 编程语言 | C,C++ |
| 编译器 | HighTec (GCC) |
| autosar版本 | 4.3.1 |
| 参考文档 | TechnicalReference_Dcm.pdf AUTOSAR_SRS_DiagnosticLogAndTrace.pdf AUTOSAR_SWS_DiagnosticCommunicationManager.pdf AUTOSAR_SWS_DiagnosticEventManager.pdf AUTOSAR_SWS_FunctionInhibitionManager.pdf- 【14229-1.2.3】,【15765-1.2.3.4】. 【11898】 《MICROSAR Classic DCM》 |
>>>>>>>>>>>>>>>>>>>>>>>>>回到总目录<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<

| 缩写 | 描述 |
|---|---|
| DEM | Diagnostic Event Manager |
| DET | Development Error Tracer |
| DDM | Diagnostic Data Modifier |
| DCM | Diagnostic Communication Manager |
| LSB | least significant byte |
| MSB | most significant byte |
| DID | Data dentifier |
| DSD | Diagostic Service Dispatcher (submodule of the DCM module) |
| DSL | Diagostic Session Layer (submodule of the DCM module) |
| DSP | Diagostic Service Processing (submodule of the DCM module) |
| ResData | response Data |
| ReqData | request Data |
| HIS | Hersteller Initiative Software |
| RCR-RP | response pending |
背景
1.基于vector 工具 的boot 跳转的通用流程及其实现。2.如何实现在在APP还是boot 中对 10 02 的response。
一、Process Jump to Bootloader
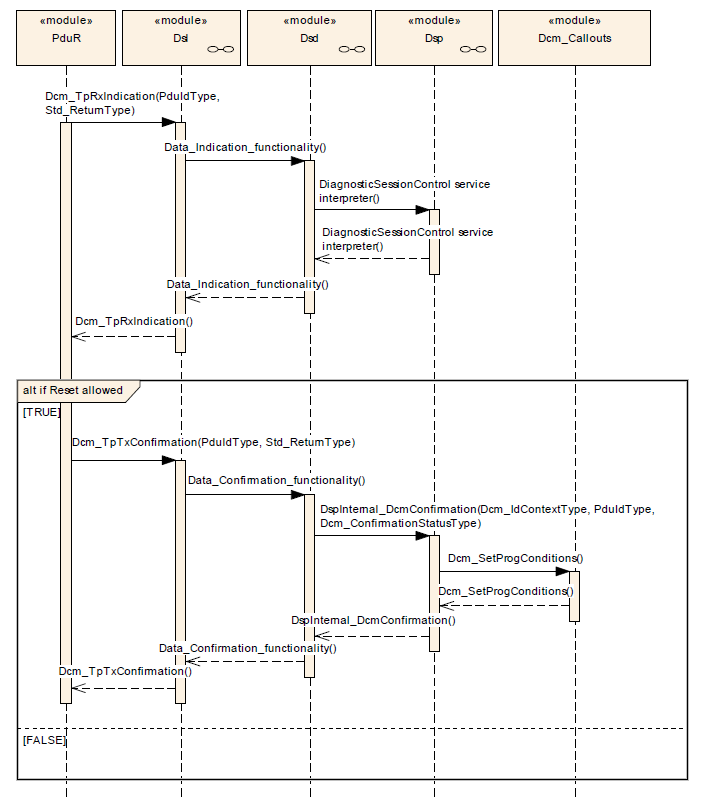
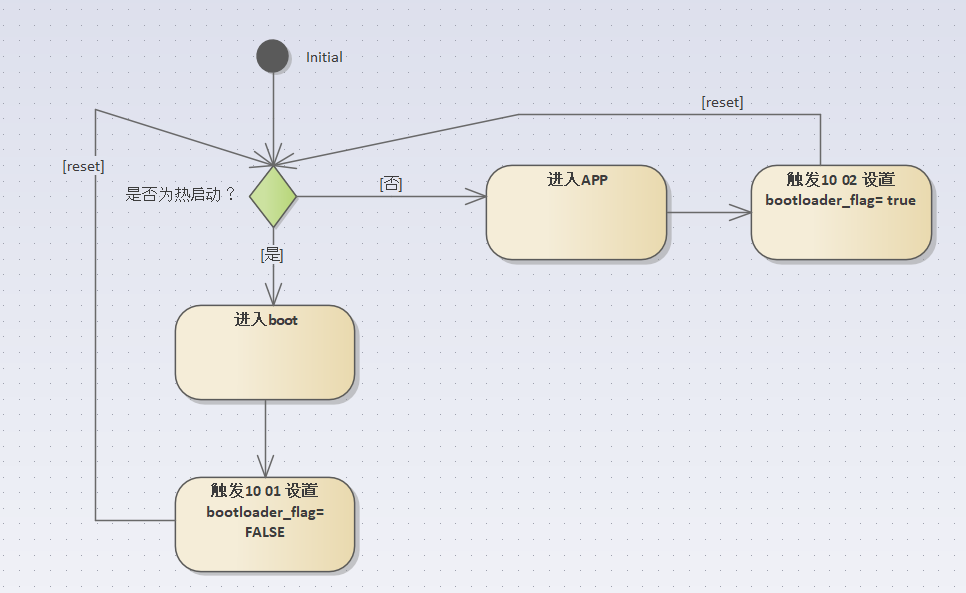
在autosar 标准文档中我们可以看到跳转到boot的流程图如下:
一般情况下需要先进入external session(10 03),并且在external session 下进行 解锁(27 01 and 27 02),再通过 10 02 进入 program session 触发上图流程。
二、相关函数和配置
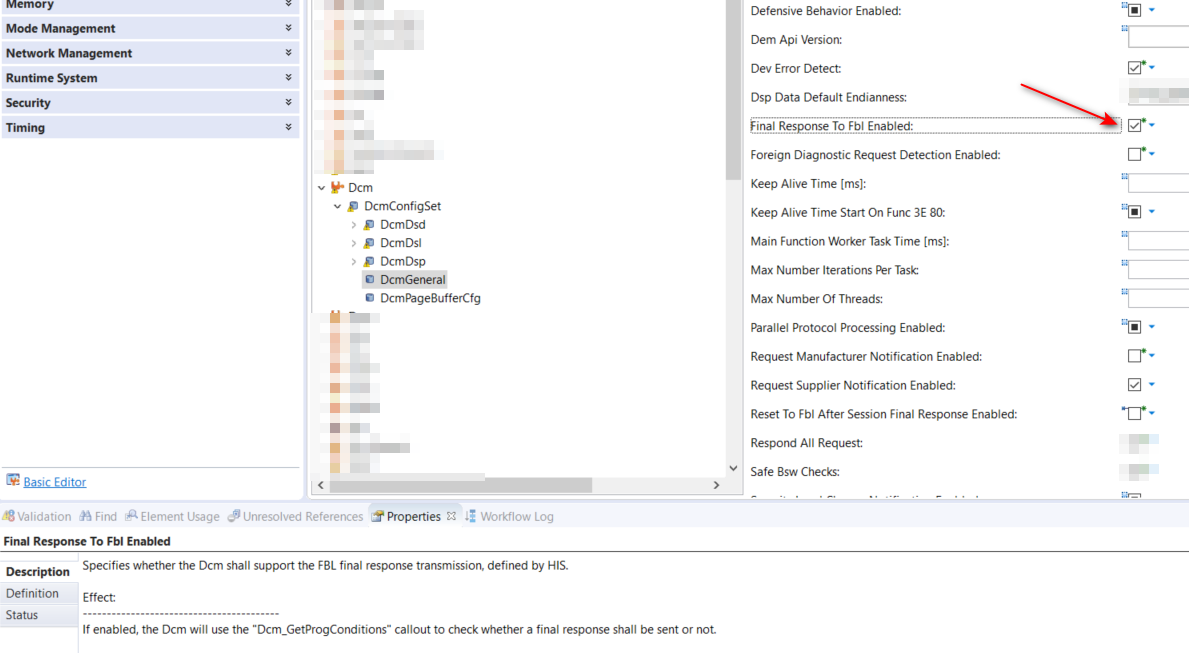
2.1 Dcm_GetProgConditions()
该函数用于在ECU启动的时候获取配置信息(例如被置位的 bootloader_flag),并根据冷启动或热启动判定结果判定是否对10 服务进行响应。
使用此函数需要配置DcmFinalResponseToFblEnabled = true.
2.2 Dcm_SetProgConditions()
此函数在触发10 02 后被调用,主要实现在跳转到boot 前的信息的存储(如置位 bootloader_flag),硬件配置(如关闭watchdog 检测)等,最后调用软复位 函数对ECU进行复位。
三、如何实现在APP 还是BOOT 中对10 02服务响应
两种情况:1.在请求 10 02 后 ,先在APP 中 对 10 02 进行 positive response,然后进行ecu复位,复位后进入boot。2.在请求 10 02 后 ,先在APP 中进行ecu复位,诊断响应0x78 pending,复位后进入boot,再在boot中 对 10 02 进行 positive response。
3.1 配置
要实现此功能需要进行两处配置
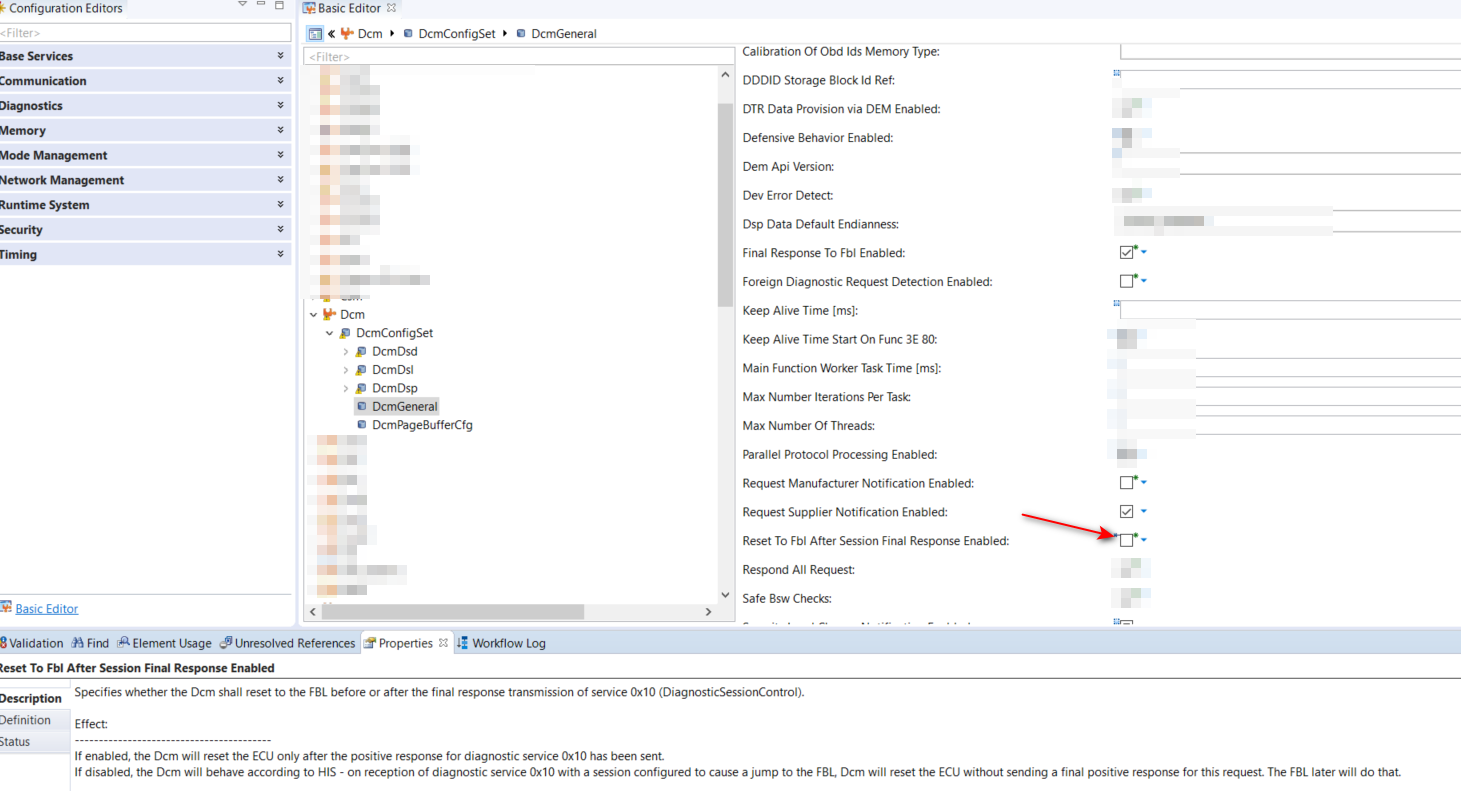
1.DcmResetToFblAfterSessionFinalResponseEnabled
该配置决定了是否在APP 中响应10 服务。如果设置为false,则为在BOOT 中响应。
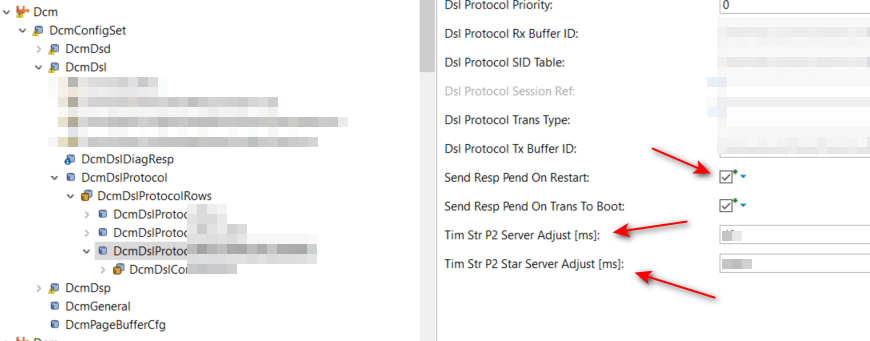
2.DcmSendRespPendOnRestart
该配置决定了是否在ECU复位前发送0x78 即RCR-RP 。同时需要合理设置P2 和P2* 时间。
3.2 code
1.Dcm_SetProgConditions()
Std_ReturnType Dcm_SetProgConditions(Dcm_ProgConditionsPtrType progConditions)
{
Std_ReturnType retVal = DCM_E_NOT_OK;
Psc_t_Status s_RetVal_Psc = PSC_NOT_OK;
if(NULL_PTR != progConditions)
{
if( (progConditions->ReprogrammingRequest == TRUE) &&
(progConditions->Sid == 0x10) &&
(progConditions->ResponseRequired == FALSE) &&
(progConditions->SubFuncId == 0x02) )
{
bootloader_flag = TRUE;/*设置标志位用于在复位后判定是该进入app还是boot*/
close_watchdog() /*关闭喂狗*/
Mcu_PerformReset()/*复位,4.0.3之前调用这个函数,新版本会在10 或者 11复位 触发Rte_Switch_DcmEcuReset_DcmEcuReset进行复位*/
retVal = DCM_E_OK;
}
if (progConditions->ReprogrammingRequest == FALSE)
{
retVal = DCM_E_OK;
}
}
else
{
/* NOK returned */
}
return retVal;
}
2.Dcm_GetProgConditions()
Dcm_EcuStartModeType Dcm_GetProgConditions(Dcm_ProgConditionsPtrType progConditions)
{
Dcm_EcuStartModeType retVal = DCM_COLD_START;
if(NULL_PTR != progConditions)
{
/* Check if there was a programming request */
if(bootloader_flag == TRUE) /*热启动,从APP跳转而来*/
{
progConditions->TesterSourceAddr = DIAG_ID;/*DcmDslProtocolRxTesterSourceAddr 配置的值*/
progConditions->Sid = 0x10;
progConditions->SubFuncId = 0x02;
progConditions->ResponseRequired = TRUE;/*TRUE 才能响应*/
progConditions->ApplUpdated = FALSE;
bootloader_flag == FALSE;/*清除标志位*/
retVal = DCM_WARM_START;
}
}
if(retVal == DCM_COLD_START)
{
/* The ECU starts normally */
progConditions->TesterSourceAddr = DIAG_ID;/*DcmDslProtocolRxTesterSourceAddr*/
progConditions->ProtocolId = 0;
progConditions->Sid = 0x10;
progConditions->SubFuncId = 0x02;
progConditions->ReprogrammingRequest = FALSE;
progConditions->ResponseRequired = FALSE;
progConditions->ApplUpdated = FALSE;
}
return retVal;
}
四、报文

五、小结
>>>>>>>>>>>>>>>>>>>>>>>>>回到总目录<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<