题目
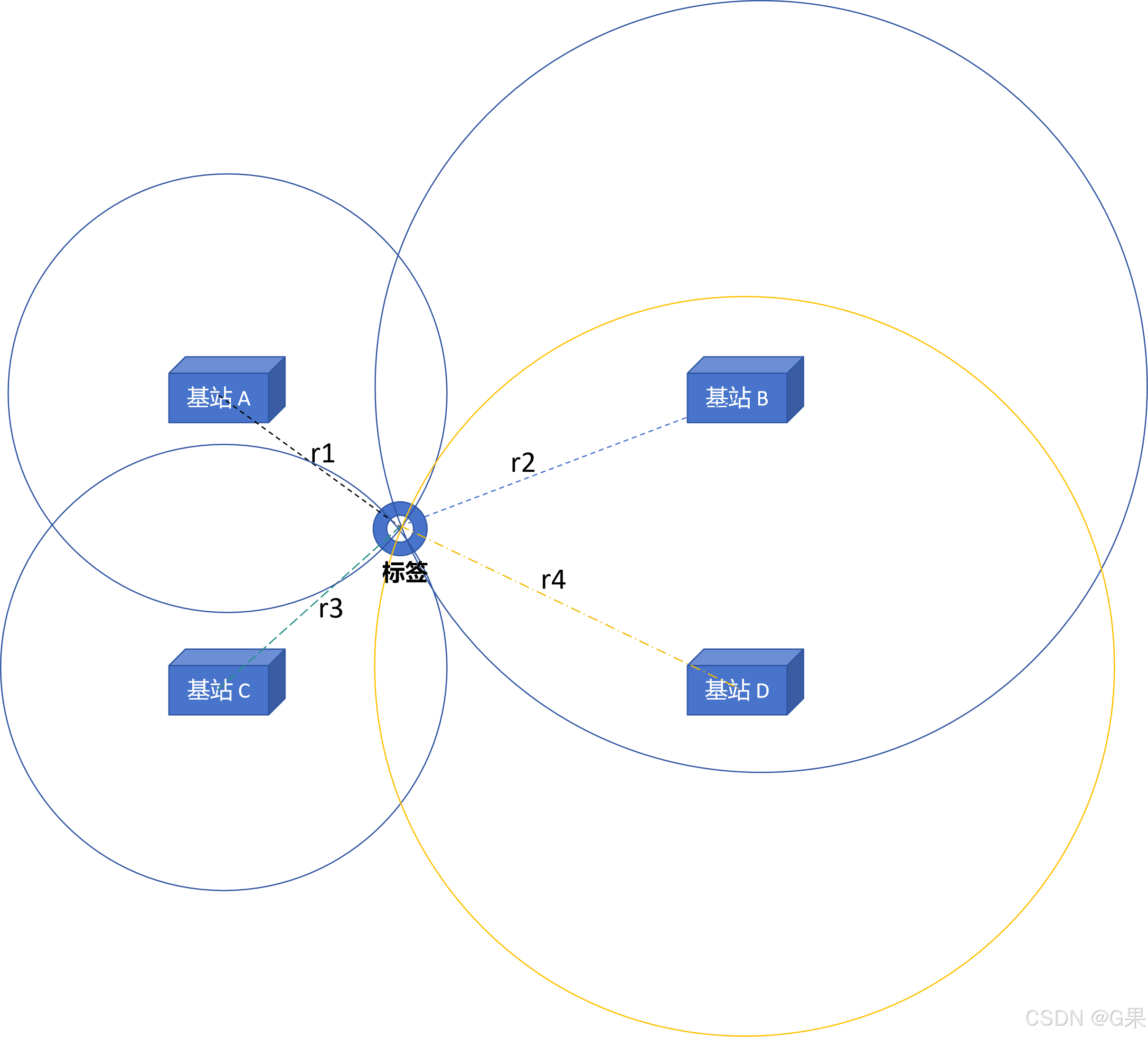
假设标签坐标为(x0,y0),基站ABCD的坐标分别为(x1,y1)(x2,y2)(x3,y3)(x4,y4),基站坐标已知,如何计算标签坐标?
三球交汇定理
三球交汇定位( Three-ball intersection positioning schematic )是一种基于几何原理的定位方法,通过已知的三个点(基站)和目标到这些点的距离来确定目标的位置。该方法在二维平面上进行,可以扩展到三维空间。题目中有4个基站,根据定理,选择三个基站进行方程计算即可。
计算过程
-
距离方程:每个基站和标签之间的距离满足以下方程
( x n − x 0 ) 2 + ( y n − y 0 ) = r n 2 ; 其中 n = 1 , 2 , 3 , 4 \begin{aligned} & \left(x_n-x_0\right)^2+\left(y_n-y_0\right)=r_n^2; 其中n=1,2,3,4 \end{aligned} (xn−x0)2+(yn−y0)=rn2;其中n=1,2,3,4 -
转换方程:展开上述方程并简化,得到以下四个方程
x 0 2 + y 0 2 − 2 x 0 x 1 − 2 y 0 y 1 + x 1 2 + y 1 2 = r 1 2 x 0 2 + y 0 2 − 2 x 0 x 2 − 2 y 0 y 2 + x 2 2 + y 2 2 = r 2 2 x 0 2 + y 0 2 − 2 x 0 x 3 − 2 y 0 y 3 + x 3 2 + y 3 2 = r 3 2 x 0 2 + y 0 2 − 2 x 0 x 4 − 2 y 0 y 4 + x 4 2 + y 4 2 = r 4 2 \begin{aligned} & x_0^2+y_0^2-2 x_0 x_1-2 y_0 y_1+x_1^2+y_1^2=r_1^2 \\ & x_0^2+y_0^2-2 x_0 x_2-2 y_0 y_2+x_2^2+y_2^2=r_2^2 \\ & x_0^2+y_0^2-2 x_0 x_3-2 y_0 y_3+x_3^2+y_3^2=r_3^2 \\ & x_0^2+y_0^2-2 x_0 x_4-2 y_0 y_4+x_4^2+y_4^2=r_4^2~~ \end{aligned} x02+y02−2x0x1−2y0y1+x12+y12=r12x02+y02−2x0x2−2y0y2+x22+y22=r22x02+y02−2x0x3−2y0y3+x32+y32=r32x02+y02−2x0x4−2y0y4+x42+y42=r42 -
作差消元法:通过减去这些方程,消除 x 0 2 + y 0 2 x_0^2+y_0^2 x02+y02 ,可以得到三个新的线性方程:
− 2 x 0 ( x 1 − x 2 ) − 2 y 0 ( y 1 − y 2 ) = r 1 2 − r 2 2 + x 2 2 + y 2 2 − x 1 2 − y 1 2 − 2 x 0 ( x 1 − x 3 ) − 2 y 0 ( y 1 − y 3 ) = r 1 2 − r 3 2 + x 3 2 + y 3 2 − x 1 2 − y 1 2 − 2 x 0 ( x 1 − x 4 ) − 2 y 0 ( y 1 − y 4 ) = r 1 2 − r 4 2 + x 4 2 + y 4 2 − x 1 2 − y 1 2 \begin{aligned} & -2 x_0\left(x_1-x_2\right)-2 y_0\left(y_1-y_2\right)=r_1^2-r_2^2+x_2^2+y_2^2-x_1^2-y_1^2 \\ & -2 x_0\left(x_1-x_3\right)-2 y_0\left(y_1-y_3\right)=r_1^2-r_3^2+x_3^2+y_3^2-x_1^2-y_1^2 \\ & -2 x_0\left(x_1-x_4\right)-2 y_0\left(y_1-y_4\right)=r_1^2-r_4^2+x_4^2+y_4^2-x_1^2-y_1^2 \end{aligned} −2x0(x1−x2)−2y0(y1−y2)=r12−r22+x22+y22−x12−y12−2x0(x1−x3)−2y0(y1−y3)=r12−r32+x32+y32−x12−y12−2x0(x1−x4)−2y0(y1−y4)=r12−r42+x42+y42−x12−y12
- 矩阵形式:提取
x
0
x_0
x0 和
y
0
y_0
y0 作为变量矩阵
[ x 1 − x 2 y 1 − y 2 x 1 − x 3 y 1 − y 3 x 1 − x 4 y 1 − y 4 ] [ x 0 y 0 ] = 1 2 [ r 1 2 − r 2 2 + x 2 2 + y 2 2 − x 1 2 − y 1 2 r 1 2 − r 3 2 + x 3 2 + y 3 2 − x 1 2 − y 1 2 r 1 2 − r 4 2 + x 4 2 + y 4 2 − x 1 2 − y 1 2 ] \left[\begin{array}{ll} x_1-x_2 & y_1-y_2 \\ x_1-x_3 & y_1-y_3 \\ x_1-x_4 & y_1-y_4 \end{array}\right]\left[\begin{array}{l} x_0 \\ y_0 \end{array}\right]=\frac{1}{2}\left[\begin{array}{l} r_1^2-r_2^2+x_2^2+y_2^2-x_1^2-y_1^2 \\ r_1^2-r_3^2+x_3^2+y_3^2-x_1^2-y_1^2 \\ r_1^2-r_4^2+x_4^2+y_4^2-x_1^2-y_1^2 \end{array}\right] x1−x2x1−x3x1−x4y1−y2y1−y3y1−y4 [x0y0]=21 r12−r22+x22+y22−x12−y12r12−r32+x32+y32−x12−y12r12−r42+x42+y42−x12−y12
代码实现
这个代码示例展示了如何通过球交汇定理计算标签的坐标。如果有四个基站数据,通常可以通过最小二乘法得到标签的坐标。
import numpy as np
def calculate_tag_position(x_coords, y_coords, distances):
# 基站坐标
x1, x2, x3, x4 = x_coords
y1, y2, y3, y4 = y_coords
r1, r2, r3, r4 = distances
# 系数矩阵
A = np.array([
[x1 - x2, y1 - y2],
[x1 - x3, y1 - y3],
[x1 - x4, y1 - y4]
])
# 常数项
B = 0.5 * np.array([
r1**2 - r2**2 + x2**2 + y2**2 - x1**2 - y1**2,
r1**2 - r3**2 + x3**2 + y3**2 - x1**2 - y1**2,
r1**2 - r4**2 + x4**2 + y4**2 - x1**2 - y1**2
])
# 解方程 Ax = B
pos, residuals, rank, s = np.linalg.lstsq(A, B, rcond=None)
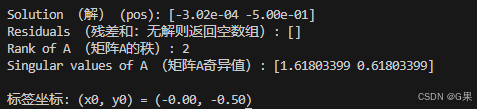
print("\nSolution (解) (pos):", pos)
print("Residuals (残差和:无解则返回空数组):", residuals)
print("Rank of A (矩阵A的秩):", rank)
print("Singular values of A (矩阵A奇异值):", s)
return pos
# 示例数据
x_coords = [0, 1, 0, 1]
y_coords = [0, 0, 1, 1]
distances = [1.0, 1.414, 1.0, 1.414]#距离
# 计算标签坐标
tag_position = calculate_tag_position(x_coords, y_coords, distances)
print(f"标签坐标: (x0, y0) = ({tag_position[0]:.2f}, {tag_position[1]:.2f})")
说明
- x_coords 和 y_coords:基站的已知坐标。
- distances:标签到每个基站的距离。
- np.linalg.lstsq:使用最小二乘法求解方程组。(显然示例数据无解,求近似解使得distance的误差最小)
- 上述代码举例是是用了4个基站的联立方程,结果用3基站的三球求解结果一样。
使用4个基站数据的结果:
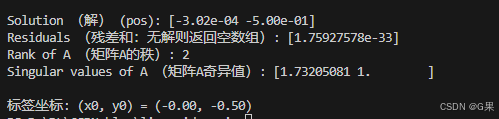
使用3个基站数据的结果(注释 矩阵A的第二行 和 矩阵B的第二行):