编码器编程基于STM32F407IG,前置基础知识是定时器输入捕获。
原理详解
编码器的种类有增量式编码器、绝对式编码器、混合式绝对式编码器。
本实验使用增量式编码器
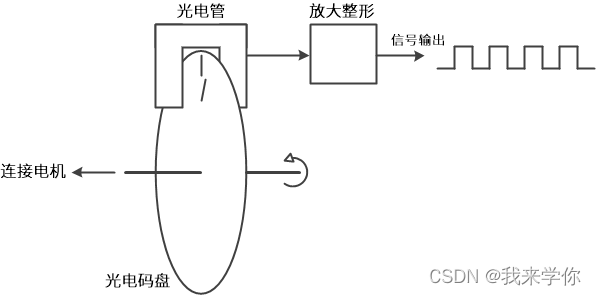
基本编码器的原理示意图如下图所示。旋转编码器内部大都由码盘、光电检测装置和信号处理电路等部分构成。码盘上刻了若干圈线槽, 线槽等距并且可透光,当码盘旋转时就会周期性的透过和遮挡来自光电检测装置的光线,这样检测装置就会周期性的生成若干电信号。 但是这些电信号通常比较微弱,需要加入一套处理电路对信号进行放大和整形,最后把信号整形为脉冲信号并向外输出。编码器基本原理图
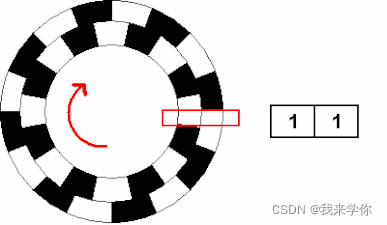
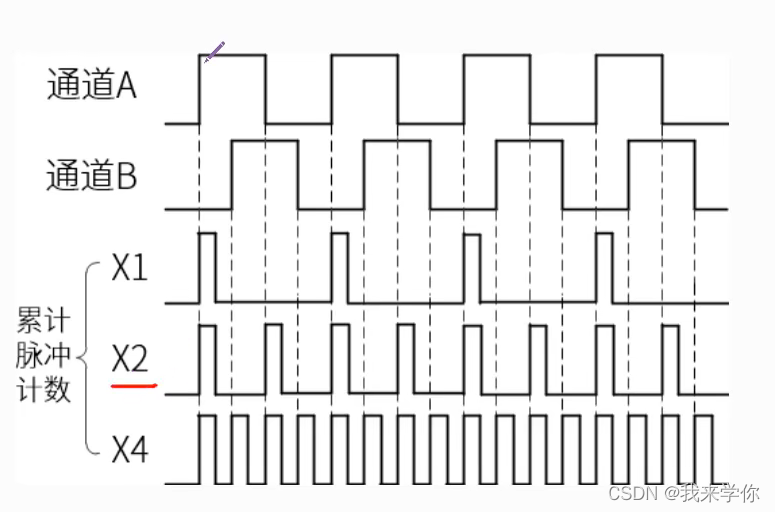
增量式编码器都有A、B两通道信号输出,这是因为增量式编码器的码盘上有两圈线槽, 两圈线槽的之间会错开一定的角度,这个角度会使得光电检测装置输出的两相信号相差 1/4 周期(90°)。
目的是根据两相信号变化的先后顺序就可以判断运动方向,记录输出的脉冲个数可以知道位移量的大小,同时通过输出信号的频率就能得到速度。
采集信号时使用四倍频技术是为了增加分辨率
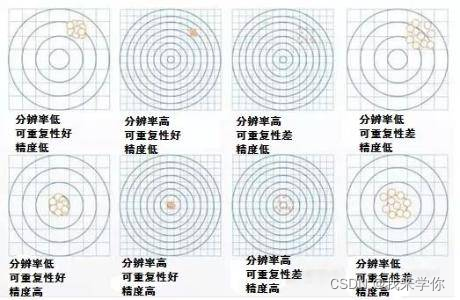
分辨率:指编码器能够分辨的最小单位。
精度是指编码器每个读数与转轴实际位置间的最大误差,通常用角度、角分或角秒来表示。
分辨率通过分频提高了四倍,精度是不改变的,所以精确率增加了。精确率是由分辨率和精度共同决定的。
代码详解
/**
* @brief 配置TIMx编码器模式
* @param 无
* @retval 无
*/
static void TIM_Encoder_Init(void)
{
TIM_Encoder_InitTypeDef Encoder_ConfigStructure;
/* 使能编码器接口时钟 */
ENCODER_TIM_CLK_ENABLE();
/* 定时器初始化设置 */
TIM_EncoderHandle.Instance = ENCODER_TIM;
//捕获预分频器的值为0时代表每捕获一个边沿便执行捕获
TIM_EncoderHandle.Init.Prescaler = 0;
//向上计数
TIM_EncoderHandle.Init.CounterMode = TIM_COUNTERMODE_UP;
//捕获一个周期总次数为最大值65535
TIM_EncoderHandle.Init.Period = 65535;
//不分频
TIM_EncoderHandle.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
TIM_EncoderHandle.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
/* 设置编码器倍频数 */
Encoder_ConfigStructure.EncoderMode = ENCODER_MODE;
/* 编码器接口通道1设置 上升沿开始*/
Encoder_ConfigStructure.IC1Polarity = TIM_ICPOLARITY_RISING;
//编码器极性设置,没有反方向就不用管
Encoder_ConfigStructure.IC1Selection = TIM_ICSELECTION_DIRECTTI;
//不分频
Encoder_ConfigStructure.IC1Prescaler = TIM_ICPSC_DIV1;
Encoder_ConfigStructure.IC1Filter = 0;
/* 编码器接口通道2设置 */
Encoder_ConfigStructure.IC2Polarity = TIM_ICPOLARITY_RISING;
Encoder_ConfigStructure.IC2Selection = TIM_ICSELECTION_DIRECTTI;
Encoder_ConfigStructure.IC2Prescaler = TIM_ICPSC_DIV1;
Encoder_ConfigStructure.IC2Filter = 0;
/* 初始化编码器接口 */
HAL_TIM_Encoder_Init(&TIM_EncoderHandle, &Encoder_ConfigStructure);
/* 清零计数器 */
__HAL_TIM_SET_COUNTER(&TIM_EncoderHandle, 0);
/* 清零中断标志位 */
__HAL_TIM_CLEAR_IT(&TIM_EncoderHandle,TIM_IT_UPDATE);
/* 使能定时器的更新事件中断 */
__HAL_TIM_ENABLE_IT(&TIM_EncoderHandle,TIM_IT_UPDATE);
/* 设置更新事件请求源为:计数器溢出 */
__HAL_TIM_URS_ENABLE(&TIM_EncoderHandle);
/* 设置中断优先级 */
HAL_NVIC_SetPriority(ENCODER_TIM_IRQn, 0, 1);
/* 使能定时器中断 */
HAL_NVIC_EnableIRQ(ENCODER_TIM_IRQn);
/* 使能编码器接口 */
HAL_TIM_Encoder_Start(&TIM_EncoderHandle, TIM_CHANNEL_ALL);
}
/**
* @brief 编码器接口引脚初始化
* @param 无
* @retval 无
*/
static void Encoder_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* 定时器通道引脚端口时钟使能 */
ENCODER_TIM_CH1_GPIO_CLK_ENABLE();
ENCODER_TIM_CH2_GPIO_CLK_ENABLE();
/**TIM3 GPIO Configuration
PC6 ------> TIM3_CH1
PC7 ------> TIM3_CH2
*/
/* 设置输入类型 */
GPIO_InitStruct.Mode = GPIO_MODE_AF_OD;
/* 设置上拉 */
GPIO_InitStruct.Pull = GPIO_PULLUP;
/* 设置引脚速率 */
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
/* 选择要控制的GPIO引脚 */
GPIO_InitStruct.Pin = ENCODER_TIM_CH1_PIN;
/* 设置复用 */
GPIO_InitStruct.Alternate = ENCODER_TIM_CH1_GPIO_AF;
/* 调用库函数,使用上面配置的GPIO_InitStructure初始化GPIO */
HAL_GPIO_Init(ENCODER_TIM_CH1_GPIO_PORT, &GPIO_InitStruct);
/* 选择要控制的GPIO引脚 */
GPIO_InitStruct.Pin = ENCODER_TIM_CH2_PIN;
/* 设置复用 */
GPIO_InitStruct.Alternate = ENCODER_TIM_CH2_GPIO_AF;
/* 调用库函数,使用上面配置的GPIO_InitStructure初始化GPIO */
HAL_GPIO_Init(ENCODER_TIM_CH2_GPIO_PORT, &GPIO_InitStruct);
}
/**
* @brief 编码器接口初始化
* @param 无
* @retval 无
*/
void Encoder_Init(void)
{
Encoder_GPIO_Init(); /* 引脚初始化 */
TIM_Encoder_Init(); /* 配置编码器接口 */
}
.h文件
#ifndef __BSP_ENCOEDER_H
#define __BSP_ENCOEDER_H
#include "stm32f4xx.h"
/* 定时器选择 */
#define ENCODER_TIM TIM3
#define ENCODER_TIM_CLK_ENABLE() __HAL_RCC_TIM3_CLK_ENABLE()
/* 定时器溢出值 */
#define ENCODER_TIM_PERIOD 65535
/* 定时器预分频值 */
#define ENCODER_TIM_PRESCALER 0
/* 定时器中断 */
#define ENCODER_TIM_IRQn TIM3_IRQn
#define ENCODER_TIM_IRQHandler TIM3_IRQHandler
/* 编码器接口引脚 */
#define ENCODER_TIM_CH1_GPIO_CLK_ENABLE() __HAL_RCC_GPIOC_CLK_ENABLE()
#define ENCODER_TIM_CH1_GPIO_PORT GPIOC
#define ENCODER_TIM_CH1_PIN GPIO_PIN_6
#define ENCODER_TIM_CH1_GPIO_AF GPIO_AF2_TIM3
#define ENCODER_TIM_CH2_GPIO_CLK_ENABLE() __HAL_RCC_GPIOC_CLK_ENABLE()
#define ENCODER_TIM_CH2_GPIO_PORT GPIOC
#define ENCODER_TIM_CH2_PIN GPIO_PIN_7
#define ENCODER_TIM_CH2_GPIO_AF GPIO_AF2_TIM3
/* 编码器接口倍频数 */
#define ENCODER_MODE TIM_ENCODERMODE_TI12
/* 编码器接口输入捕获通道相位设置 */
#define ENCODER_IC1_POLARITY TIM_ICPOLARITY_RISING
#define ENCODER_IC2_POLARITY TIM_ICPOLARITY_RISING
/* 编码器物理分辨率 */
#define ENCODER_RESOLUTION 16
/* 经过倍频之后的总分辨率 */
#if (ENCODER_MODE == TIM_ENCODERMODE_TI12)
#define ENCODER_TOTAL_RESOLUTION (ENCODER_RESOLUTION * 4) /* 4倍频后的总分辨率 */
#else
#define ENCODER_TOTAL_RESOLUTION (ENCODER_RESOLUTION * 2) /* 2倍频后的总分辨率 */
#endif
/* 减速电机减速比 */
#define REDUCTION_RATIO 30
extern __IO int16_t Encoder_Overflow_Count;
extern TIM_HandleTypeDef TIM_EncoderHandle;
void Encoder_Init(void);
#endif /* __BSP_ENCODER_H */