开新坑了开新坑了~(这应该是个长期坑,现在的想法是把学过的或者有点难度的算法都做一个可视化)
正如标题所说的那样,现在我打算来做一个算法的可视化,除了帮助自己更好的理解算法之外,也帮助其它小伙伴们更好的理解。
那么话不多说,进入今天的主角,A*寻路算法。
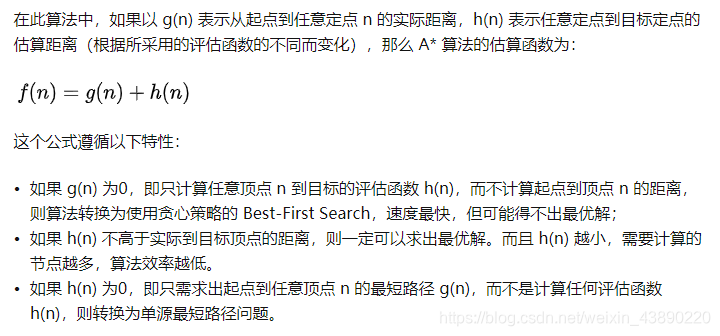
A*寻路算法的核心原理说起来十分简单:
每一次都选择综合代价最小的格子,以此实现一定方向的遍历
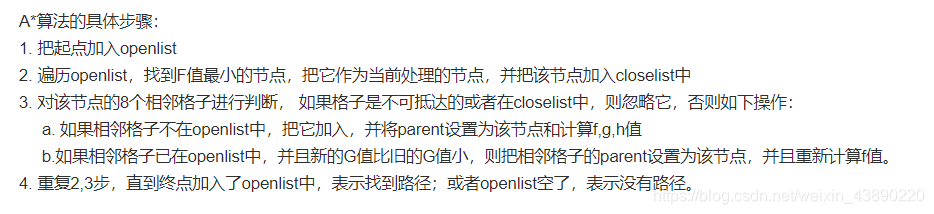
算法的具体实现思路也很简单:
整个代码部分是我自己编写的,就一个脚本,注释十分详细,但同时也有很多问题(结构有点冗余,而且有个重载操作符的问题还没解决)
现在有想法是把它做成逐帧的,按一个键一跳的那种,看看之后优化一下
其他细节:
脚本导入之后自己建几个物体赋值一下就好了
计算距离使用的是街区距离(之后会开放自选)
你可能需要自己开启是否启用斜向遍历
地图大小和障碍物的比例自定义
斜向和横向移动花费自定义
注意一下自己控制别越界了(目标和起始点的最大值为地图最大值-1)
有一个Coord类和自己循环判空的问题还没有解决,目前是使用函数替代了操作符重载
C#脚本
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public class QuadGenerate : MonoBehaviour
{
public GameObject MyQuadPrefab;//瓦片的预制体
public GameObject MyMapHolder;//瓦片挂载的父节点
public GameObject RoadHolder;//路径挂载点
public int MapSizeX;//地图大小自己指定
public int MapSizeZ;
public int TargetX;//目标地砖
public int TargetZ;//目标地砖
public int StartX;//起始地点X
public int StartZ;//起始地点Z
public float LineCost = 1;//横向移动花费
public float ObliqueCost = 2;//斜向移动花费
public bool isOblique;//是否斜向行走
[Range(0, 1)] public float obsPercent;//障碍物比例
private List<Coord> MyMaps;//记录所有地砖
private bool[,] mapObstacles;//判断任意一个坐标上是否有障碍物
private float QuadLength;//瓦片长度
private Coord TargetQuad;//目标地砖
private Coord StartQuad;//起始地砖
void Awake()
{
MyMaps = new List<Coord>();//列表必须初始化
Vector3 QuadScale = MyQuadPrefab.transform.localScale;
QuadLength = QuadScale.x;
TargetQuad = new Coord(TargetX, TargetZ);
StartQuad = new Coord(StartX, StartZ);
mapObstacles = new bool[(int)MapSizeX, (int)MapSizeZ];//创建障碍物的二维矩阵
}
// Start is called before the first frame update
void Start()
{
//首先先生成一张地图
Vector3 StartPos = new Vector3(-MapSizeX / 2, 0, -MapSizeZ / 2);//计算起始位置
for(int i = 0; i < MapSizeX; i++)
{
for(int j = 0; j < MapSizeZ; j++)
{
Vector3 SetPos = new Vector3(i * QuadLength, 0, j * QuadLength);//偏置位置
GameObject Quad = Instantiate(MyQuadPrefab, StartPos + SetPos, Quaternion.Euler(90, 0, 0));
Quad.transform.SetParent(MyMapHolder.transform);
Coord coord = new Coord(i, j);
if (Random.Range(0f,1f) < obsPercent && !coord.Equal(StartQuad) && !coord.Equal(TargetQuad))//使用概率构建障碍物,需要人为添加f来选择返回浮点数的重载
{
coord.setIsObs(true);//表明这个点是障碍物
mapObstacles[i, j] = true;
}
if (coord.Equal(StartQuad) || coord.Equal(TargetQuad) || coord.getIsObs())//对目标做相应处理
{
MeshRenderer meshRenderer = Quad.GetComponent<MeshRenderer>();
Material material = meshRenderer.material;
if (coord.Equal(StartQuad))
{
material.color = new Color(0, 0, 255);
}
else if(coord.Equal(TargetQuad))
{
material.color = new Color(255, 0, 0);
}
else
{
material.color = new Color(0, 255, 0);
}
meshRenderer.material = material;
}
MyMaps.Add(coord);
}
}
List<Coord> closeList = new List<Coord>();
if (isOblique)//允许斜向
{
closeList = FindRoadAStarisOblique();//斜向遍历
}
else
{
closeList = FindRoadAStar();
}
//先试着让整条路线出来,通过parent访问
Coord CurNode = closeList[closeList.Count - 1];
int count = 0;
if(CurNode!=null)
{
CurNode = CurNode.parent;
}
while (CurNode!=null && CurNode.parent != null)
{
Debug.Log("生成路径中:" + count + "当前瓦片的X和Y为:" + CurNode.x + " " + CurNode.z);
Vector3 SetPos = new Vector3(CurNode.x * QuadLength, 0.1f, CurNode.z * QuadLength);//偏置位置
GameObject Quad = Instantiate(MyQuadPrefab, StartPos + SetPos, Quaternion.Euler(90, 0, 0));
Quad.transform.SetParent(RoadHolder.transform);
MeshRenderer meshRenderer = Quad.GetComponent<MeshRenderer>();
Material material = meshRenderer.material;
material.color = new Color(0, 0, 0);
meshRenderer.material = material;
CurNode = CurNode.parent;
count++;
}
}
// Update is called once per frame
void Update()
{
}
List<Coord> FindRoadAStar()//移动方式为上下左右,我想让它每按下一个按键调用一次,即前进一步 公式为f = g(移动花费) + h(预计花费)
{
List<Coord> openList = new List<Coord>();//A*使用的开放列表
List<Coord> closeList = new List<Coord>();//A*使用的封闭列表
List<Coord> dir = new List<Coord>() { new Coord(0, 1), new Coord(1, 0), new Coord(-1, 0), new Coord(0, -1) };
StartQuad.setCost(CalcuCost(StartQuad));
openList.Add(StartQuad);
while (openList.Count != 0)
{
Coord supCoord = findFmin(openList); //找到当前花费值最小的那个
closeList.Add(supCoord);
if (supCoord.Equal(TargetQuad))//到达终点则跳出
{
Debug.Log("找到了终点");
break;
}
for (int i = 0; i < dir.Count; i++)
{
int newx = supCoord.x + dir[i].x;
int newz = supCoord.z + dir[i].z;
if (newx >= 0 && newz >= 0 && newx < MapSizeX && newz < MapSizeZ)
{
if (!mapObstacles[newx, newz] && !InList(new Coord(newx, newz), closeList))
{
//设置新瓦片并加入openList中
openList.Add(new Coord(newx, newz, false, CalcuCost(new Coord(newx, newz)), supCoord));
}
}
}
Debug.Log("一直在循环");
}
return closeList;
}
List<Coord> FindRoadAStarisOblique()//开启斜向遍历并且启动花费
{
List<Coord> openList = new List<Coord>();//A*使用的开放列表
List<Coord> closeList = new List<Coord>();//A*使用的封闭列表
List<Coord> dir1 = new List<Coord>() { new Coord(0, 1), new Coord(1, 0), new Coord(-1, 0), new Coord(0, -1) };//上下左右
List<Coord> dir2 = new List<Coord>() { new Coord(1, 1), new Coord(-1, -1), new Coord(1, -1), new Coord(-1, 1) };//斜向移动
StartQuad.setCost(CalcuCost(StartQuad));
openList.Add(StartQuad);
while(openList.Count!=0)
{
Coord supCoord = findFmin(openList);
closeList.Add(supCoord);
if (supCoord.Equal(TargetQuad))//到达终点则跳出
{
Debug.Log("找到了终点");
break;
}
for (int i=0;i<dir1.Count;i++)//先遍历横向
{
int newx = supCoord.x + dir1[i].x;
int newz = supCoord.z + dir1[i].z;
Coord nextCoord = new Coord(newx, newz);//预计算减小开销
if (newx >= 0 && newz >= 0 && newx < MapSizeX && newz < MapSizeZ)
{
if (!mapObstacles[newx, newz] && !InList(nextCoord, closeList))
{
//设置新瓦片并加入openList中
if (!InList(nextCoord, openList))//如果不在开放列表里面
{
//直接计算加入即可
float Gcost = supCoord.Gcost + LineCost;//横向移动Gcost花费为1
openList.Add(new Coord(newx, newz, false, CalcuCost(nextCoord), supCoord, Gcost));
}
else
{
float Gcost = supCoord.Gcost + LineCost;//计算新的Cost花费和原本的比较
checkGcost(nextCoord, Gcost,openList,supCoord);//检查是不是比以前的要小,是的话则更改父节点
}
}
}
}
for (int i = 0; i < dir2.Count; i++)//再遍历斜向
{
int newx = supCoord.x + dir2[i].x;
int newz = supCoord.z + dir2[i].z;
Coord nextCoord = new Coord(newx, newz);//预计算减小开销
if (newx >= 0 && newz >= 0 && newx < MapSizeX && newz < MapSizeZ)
{
if (!mapObstacles[newx, newz] && !InList(nextCoord, closeList))
{
//设置新瓦片并加入openList中
if (!InList(nextCoord, openList))//如果不在开放列表里面
{
//直接计算加入即可
float Gcost = supCoord.Gcost + ObliqueCost;//斜向移动Gcost花费为2
openList.Add(new Coord(newx, newz, false, CalcuCost(nextCoord), supCoord, Gcost));
}
else
{
float Gcost = supCoord.Gcost + ObliqueCost;//计算新的Cost花费和原本的比较
checkGcost(nextCoord, Gcost, openList, supCoord);//检查是不是比以前的要小,是的话则更改父节点
}
}
}
}
}
return closeList;
}
void checkGcost(Coord nextCoord,float Gcost,List<Coord> List,Coord parentCoord)
{
for (int i = 0; i < List.Count; i++)
{
if (nextCoord.Equal(List[i]))
{
if(Gcost<List[i].Gcost)
{
List[i].setGCost(Gcost);//SetGCost自带重新计算
List[i].setParent(parentCoord);
}
}
}
}
Coord findFmin(List<Coord> openList)//遍历好还是排序好?我选择排序
{
openList.Sort((x, y) => { return x.RealCost.CompareTo(y.RealCost); });
Coord ans = openList[0];
openList.RemoveAt(0);//删掉第一个元素
return ans;
}
int CalcuCost(Coord myQuad)
{
return Mathf.Abs(TargetX - myQuad.x) + Mathf.Abs(TargetZ - myQuad.z);
}
bool InList(Coord myQuad,List<Coord> List)//判断在不在列表里面
{
for(int i=0;i< List.Count;i++)
{
if(myQuad.Equal(List[i]))
{
return true;
}
}
return false;
}
}
public class Coord//这里如果是结构体则不能循环套用,因为C#的结构体是值类型而不是引用类型
{
public Coord(int _x, int _z,bool _isObs = false,float _cost = 0f,Coord _parent=null,float _Gcost = 0)
{
this.x = _x;
this.z = _z;
this.isObs = _isObs;
this.cost = _cost;
this.parent = _parent;
//以下字段在启用斜向的时候才有用
this.Gcost = _Gcost;
this.RealCost = this.cost + this.Gcost;
}
//public static bool operator ==(Coord _c1,Coord _c2)//求助:这里绕不开这个判空了,只能换种方式
//{
// return (_c1.x == _c2.x) && (_c1.z == _c2.z);
//}
//public static bool operator !=(Coord _c1, Coord _c2)//别忘了强制重载
//{
// return !(_c1 == _c2);
//}
public bool Equal(Coord _c)
{
return (this.x == _c.x) && (this.z == _c.z);
}
public void setIsObs(bool _isObs)
{
this.isObs = _isObs;
}
public bool getIsObs()
{
return this.isObs;
}
public void setCost(float _cost)
{
this.cost = _cost;
}
public void setParent(Coord _Parent)
{
this.parent = _Parent;
}
public void reCalRealCost()
{
this.RealCost = this.cost + this.Gcost;
}
public void setGCost(float _gcost)
{
this.Gcost = _gcost;
reCalRealCost();//重新计算RealCost
}
public int x;
public int z;
public bool isObs;//用一个值来记录是不是障碍物,会比较轻松省力
public float cost;//动态记录Hcost值
public Coord parent;
//以下字段在打开斜向之后才有用
public float Gcost;//动态记录Gcost的值
public float RealCost;//真实值
}
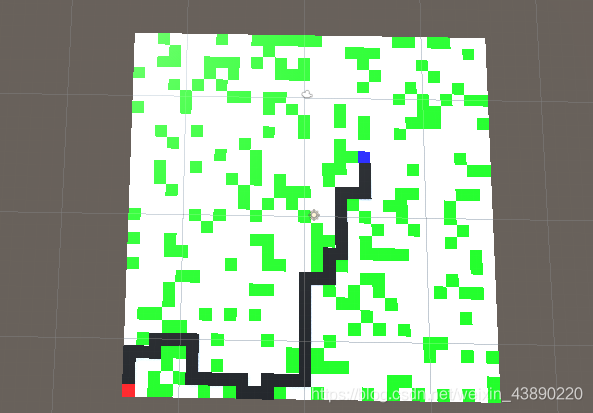
效果展示:(只允许横向移动)
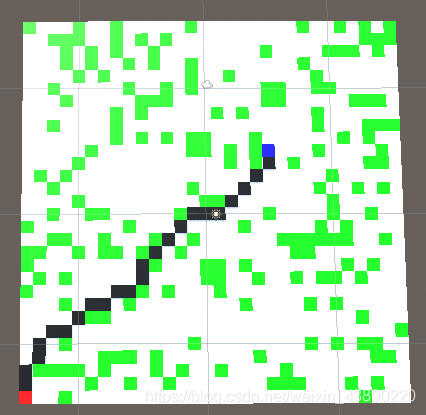
开启斜向移动