理解
通过体素网格实现降采样,可以减少点数量的同时,保证点云的形状特征,可以提高配准、曲面重建、形状识别等算法的速度,并保证准确性。
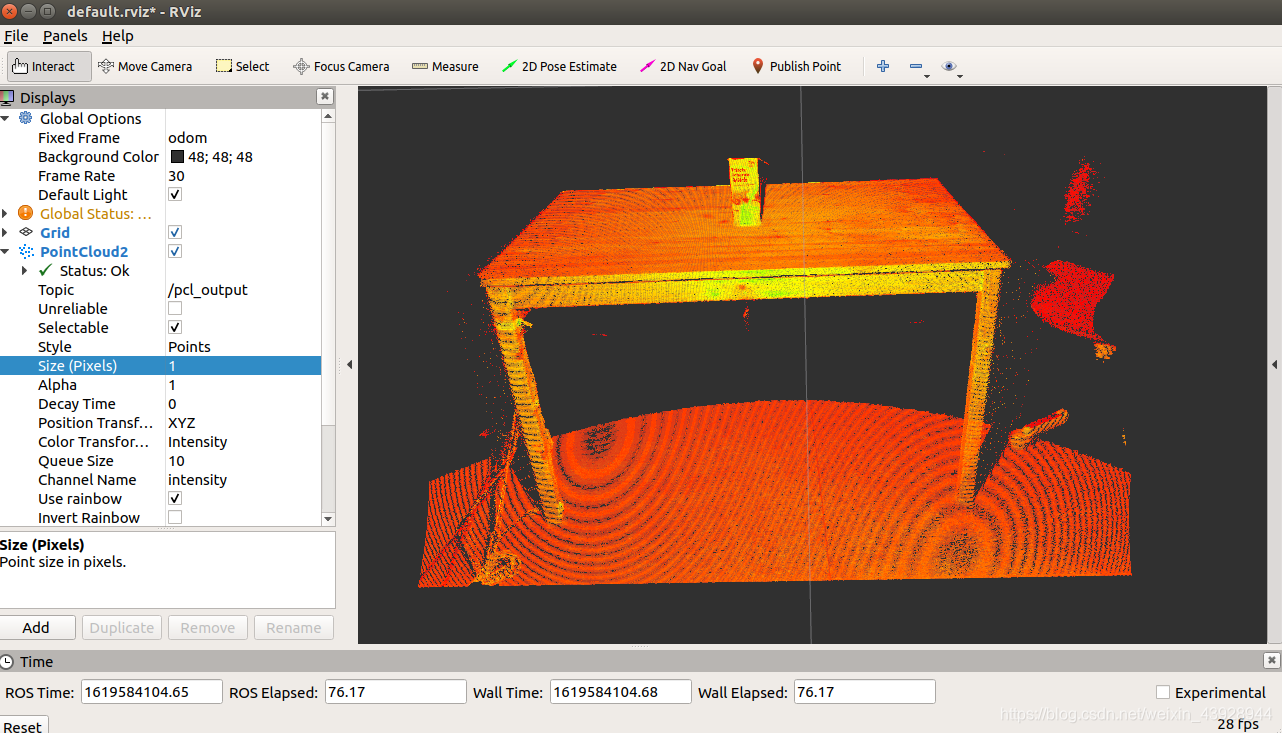
先来看看降采前的点云
#include <ros/ros.h>
#include <pcl/point_cloud.h>
#include <sensor_msgs/PointCloud2.h>
#include <pcl/io/io.h>
#include <pcl/io/pcd_io.h>
#include <pcl/PCLPointCloud2.h>
#include <pcl/conversions.h>
#include <pcl_conversions/pcl_conversions.h>
#include <pcl/point_types_conversion.h>
main (int argc, char **argv)
{
ros::init (argc, argv, "pcl_create");
ros::NodeHandle nh;
ros::Publisher pcl_pub = nh.advertise<sensor_msgs::PointCloud2> ("pcl_output", 1);
pcl::PCLPointCloud2 cloud;
sensor_msgs::PointCloud2 output;
pcl::io::loadPCDFile("/home/zjh/cloud_test/table_scene_lms400.pcd",cloud);
pcl_conversions::moveFromPCL(cloud, output);
output.header.frame_id = "odom";
ros::Rate loop_rate(1);
while (ros::ok()) {
pcl_pub.publish(output);
ros::spinOnce();
loop_rate.sleep();
}
return 0;
}
开始降采样
#include <typeinfo>
#include "boost/range.hpp"
#include <ros/ros.h>
#include <pcl/point_cloud.h>
#include <pcl_conversions/pcl_conversions.h>
#include <sensor_msgs/PointCloud2.h>
#include <pcl/io/io.h>
#include <pcl/io/pcd_io.h>
#include <iostream>
#include <vector>
#include <ctime>
#include <pcl/filters/voxel_grid.h>
#include <pcl/PCLPointCloud2.h>
#include <pcl/conversions.h>
#include <pcl_conversions/pcl_conversions.h>
#include <pcl/point_types_conversion.h>
main (int argc, char **argv)
{
ros::init (argc, argv, "pcl_create");
ros::NodeHandle nh;
ros::Publisher pcl_pub = nh.advertise<sensor_msgs::PointCloud2> ("pcl_output", 1);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud2 (new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_filtered (new pcl::PointCloud<pcl::PointXYZ>);
pcl::PCLPointCloud2 cloud;
sensor_msgs::PointCloud2 output;
pcl::io::loadPCDFile("/home/zjh/cloud_test/table_scene_lms400.pcd",cloud);
pcl::fromPCLPointCloud2 (cloud,*cloud2);
std::cout << typeid(cloud).name() << " "<< typeid(*cloud2).name() <<std::endl;
// 创建一个长宽高分别是3cm的体素过滤器,cloud作为输入数据,cloud_filtered作为输出数据
float leftSize = 0.03f;
pcl::VoxelGrid<pcl::PointXYZ> sor;
sor.setInputCloud (cloud2);
sor.setLeafSize (leftSize, leftSize, leftSize);
sor.filter(*cloud_filtered);
std::cerr << "PointCloud after filtering: " << cloud_filtered->width * cloud_filtered->height
<< " data points (" << pcl::getFieldsList (*cloud_filtered) << ").";
std::cout << cloud2->width << " "<< cloud2->height << " " << cloud_filtered->width <<" " << cloud_filtered->height <<std::endl;
pcl::toROSMsg(*cloud_filtered, output);
output.header.frame_id = "odom";
ros::Rate loop_rate(1);
while (ros::ok()) {
pcl_pub.publish(output);
ros::spinOnce();
loop_rate.sleep();
}
return 0;
}
看一下输出:
PointCloud after filtering: 5544 data points (x y z).460400 1 5544 1
由之前的460400 个点降到了 5544个点
为了效果明显参数设置的很了点,看一下降采的效果
点的密度明显有了变化。
