一、算法简介
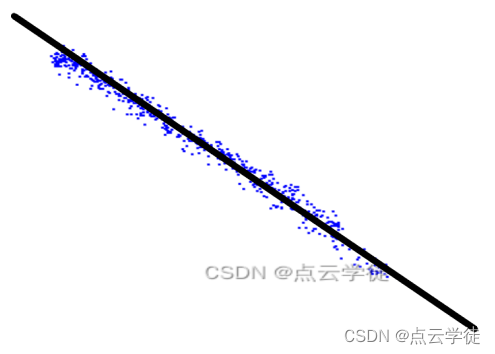
在二百章中,我们介绍了一种最小二乘拟合直线点云(2D)的方法,可以获取直线方程系数k,b,这里介绍另一种拟合直线点云的方法,更为简单方便,结果与前者一致,主要内容直接复制代码使用即可,原理简单看代码即可,下面是具体的实现和拟合结果展示
离散点云中拟合规则数学表达是有必要的
二、算法实现
1.代码
代码如下(示例):
#include <iostream>
#include <pcl/point_types.h>
#在二百章中,我们介绍了一种最小二乘拟合直线点云(2D)的方法,可以获取直线方程系数k,b,这里介绍另一种拟合直线点云的方法,更为简单方便,结果与前者一致,主要内容直接复制代码使用即可,原理简单看代码即可,下面是具体的实现和拟合结果展示
离散点云中拟合规则数学表达是有必要的
代码如下(示例):
#include <iostream>
#include <pcl/point_types.h>
#道可道,非常道;名可名,非常名。 无名,天地之始,有名,万物之母。 故常无欲,以观其妙,常有欲,以观其徼。 此两者,同出而异名,同谓之玄,玄之又玄,众妙之门。