
计算机视觉(Compute Vision,CV)给计算机装上了“眼睛”,让计算机像人类一样也有“视觉”能力,能够“看”懂图片里的内容。
作为深度学习领域的最重要的应用场景之一,在手机拍照、智能安防、自动驾驶等场景均有广泛的应用。同时也出现了一批经典的网络,如AlexNet、ResNet等。 本文以典型的图片分类网络ResNet50为例,介绍一下如何使用MindSpore来完成一个CV应用的开发及部署。


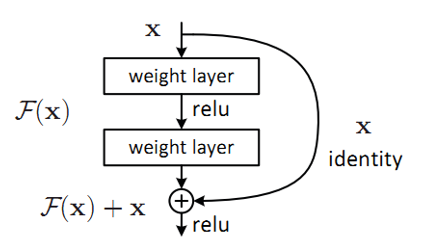
卷积神经网络能够很好的提取图片中的特征,并且能够通过降维来减少计算量,在CV领域应用的非常广泛 。在早期的卷积神经网络中,往往通过增加网络的深度来获取更好的算法效果,然而随着网络深度的加深,梯度的反向传播路径会越长,由链式法则的原理可以看出,反向传播的路径越长,得到的梯度值越趋近于0,从而导致梯度消失。
残差网络(如图x所示)的出现解决这个问题。通过不同的残差网络的组合,构成了一系列的ResNet网络结构,如表x所示。
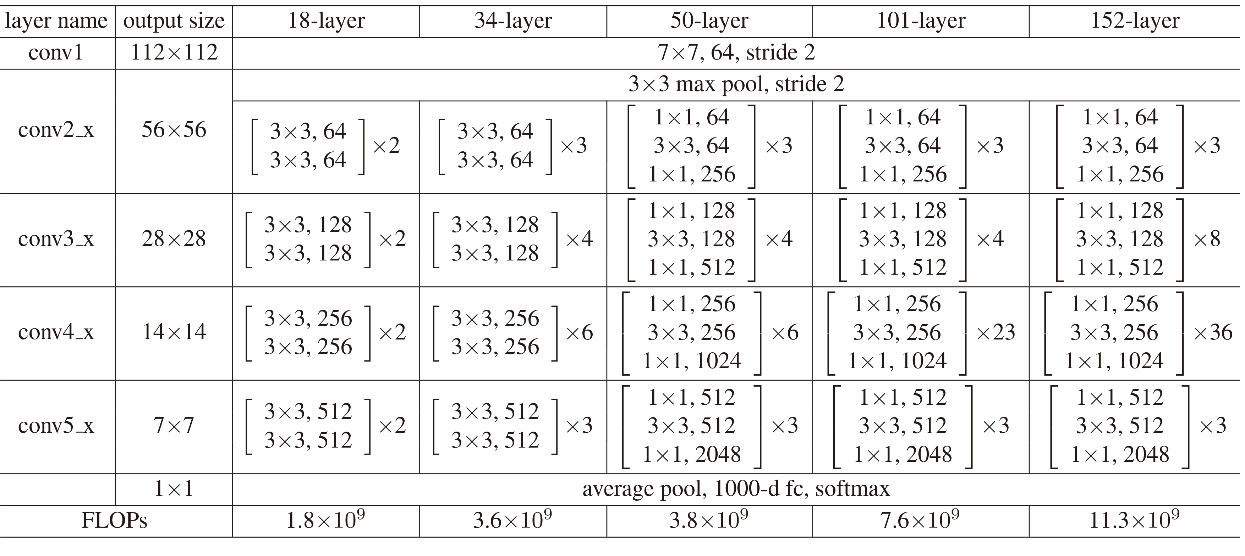

这里以ResNet50为例,介绍一下如何使用MindSpore来完成一个CV的典型算法的编码、训练、部署等环节。
在此仅列出了部分重要代码片段,完整代码请参考:
https://gitee.com/mindspore/mindspore/blob/master/model_zoo/resnet
1. 网络定义
通过MindSpore的提供的接口可以很方便的构建所需要的网络,如ResNet50所使用的残差结构定义如下:
class ResidualBlock(nn.Cell):
"""
ResNet V1 residual block definition.
Args:
in_channel (int): Input channel.
out_channel (int): Output channel.
stride (int): Stride size for the first convolutional layer. Default: 1.
Returns:
Tensor, output tensor.
Examples:
>>> ResidualBlock(3, 256, stride=2)
"""
expansion = 4
def __init__(self,
in_channel,
out_channel,
stride=1):
super(ResidualBlock, self).__init__()
channel = out_channel // self.expansion
self.conv1 = _conv1x1(in_channel, channel, stride=1)
self.bn1 = _bn(channel)
self.conv2 = _conv3x3(channel, channel, stride=stride)
self.bn2 = _bn(channel)
self.conv3 = _conv1x1(channel, out_chan