文章目录
内容转自Unit 1: An Introduction to Diffusion Models
一、使用diffusers 库生成图片
首先安装必要的库
%pip install -qq -U diffusers datasets transformers accelerate ftfy pyarrow
DreamBooth 是一种深度学习生成模型,用于通过微调来个性化现有的文本到图像模型。下面是一个示例
from diffusers import StableDiffusionPipeline
# Check out https://huggingface.co/sd-dreambooth-library for loads of models from the community
model_id = "sd-dreambooth-library/mr-potato-head"
# Load the pipeline
pipe = StableDiffusionPipeline.from_pretrained(model_id, torch_dtype=torch.float16).to(
device
)
prompt = "an abstract oil painting of sks mr potato head by picasso"
image = pipe(prompt, num_inference_steps=50, guidance_scale=7.5).images[0]
image
二、训练自己的扩散模型
Diffusers 的核心 API 被分为三个主要部分:
- 管道: 从高层出发设计的多种类函数,旨在以易部署的方式,能够做到快速通过主流预训练好的扩散模型来生成样本。
- 模型: 训练新的扩散模型时用到的主流网络架构,e.g. UNet.
- 管理器 (or 调度器): 在 推理 中使用多种不同的技巧来从噪声中生成图像,同时也可以生成在 训练 中所需的带噪图像。
训练一个扩散模型的流程看起来像是这样:
- 从训练集中加载一些图像
- 从不同程度上加入噪声
- 把带了不同版本噪声的数据送进模型
- 评估模型在对这些数据做增强去噪时的表现
- 使用这个信息来更新模型权重,然后重复此步骤
1. 下载一个训练数据集
我们会用到一个来自 Hugging Face Hub 的图像集。具体来说,是个 1000 张蝴蝶图像收藏集。也可以使用自己的数据集
import torchvision
from datasets import load_dataset
from torchvision import transforms
dataset = load_dataset("huggan/smithsonian_butterflies_subset", split="train")
# Or load images from a local folder
# dataset = load_dataset("imagefolder", data_dir="path/to/folder")
# We'll train on 32-pixel square images, but you can try larger sizes too
image_size = 32
# You can lower your batch size if you're running out of GPU memory
batch_size = 64
# Define data augmentations
preprocess = transforms.Compose(
[
transforms.Resize((image_size, image_size)), # Resize
transforms.RandomHorizontalFlip(), # Randomly flip (data augmentation)
transforms.ToTensor(), # Convert to tensor (0, 1)
transforms.Normalize([0.5], [0.5]), # Map to (-1, 1)
]
)
def transform(examples):
images = [preprocess(image.convert("RGB")) for image in examples["image"]]
return {"images": images}
dataset.set_transform(transform)
# Create a dataloader from the dataset to serve up the transformed images in batches
train_dataloader = torch.utils.data.DataLoader(
dataset, batch_size=batch_size, shuffle=True
)
可以从中取出一批图像数据来看一看他们是什么样子:
xb = next(iter(train_dataloader))["images"].to(device)[:8]
print("X shape:", xb.shape)
show_images(xb).resize((8 * 64, 64), resample=Image.NEAREST)
2. 定义管理器
噪声管理器决定在不同的迭代周期时分别加入多少噪声。
from diffusers import DDPMScheduler
noise_scheduler = DDPMScheduler(num_train_timesteps=1000)
示例如下:
timesteps = torch.linspace(0, 999, 8).long().to(device)
noise = torch.randn_like(xb)
noisy_xb = noise_scheduler.add_noise(xb, noise, timesteps)
print("Noisy X shape", noisy_xb.shape)
show_images(noisy_xb).resize((8 * 64, 64), resample=Image.NEAREST)
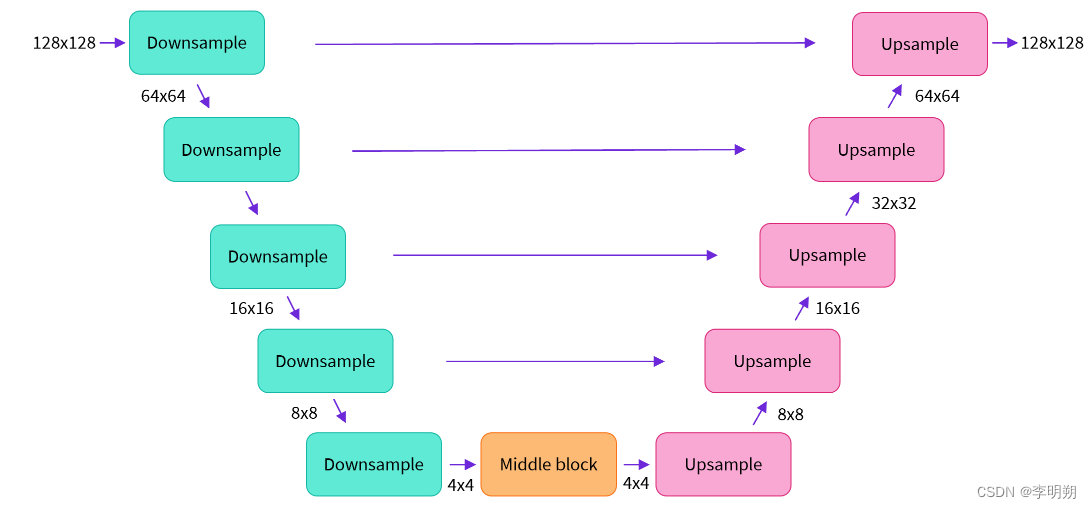
3.定义模型
大多数扩散模型使用的模型结构都是一些 U-net 的变形。Diffusers 为我们提供了一个易用的UNet2DModel类,用来在 PyTorch 创建所需要的结构。
from diffusers import UNet2DModel
# Create a model
model = UNet2DModel(
sample_size=image_size, # the target image resolution
in_channels=3, # the number of input channels, 3 for RGB images
out_channels=3, # the number of output channels
layers_per_block=2, # how many ResNet layers to use per UNet block
block_out_channels=(64, 128, 128, 256), # More channels -> more parameters
down_block_types=(
"DownBlock2D", # a regular ResNet downsampling block
"DownBlock2D",
"AttnDownBlock2D", # a ResNet downsampling block with spatial self-attention
"AttnDownBlock2D",
),
up_block_types=(
"AttnUpBlock2D",
"AttnUpBlock2D", # a ResNet upsampling block with spatial self-attention
"UpBlock2D",
"UpBlock2D", # a regular ResNet upsampling block
),
)
model.to(device);
4.开始训练
对于每一批的数据的训练过程包括
- 随机取样几个迭代周期
- 根据预设为数据加入噪声
- 把带噪数据送入模型
- 使用 MSE 作为损失函数来比较目标结果与模型预测结果(在这里是加入噪声的场景)
- 通过loss.backward ()与optimizer.step ()来更新模型参数
# Set the noise scheduler
noise_scheduler = DDPMScheduler(
num_train_timesteps=1000, beta_schedule="squaredcos_cap_v2"
)
# Training loop
optimizer = torch.optim.AdamW(model.parameters(), lr=4e-4)
losses = []
for epoch in range(30):
for step, batch in enumerate(train_dataloader):
clean_images = batch["images"].to(device)
# Sample noise to add to the images
noise = torch.randn(clean_images.shape).to(clean_images.device)
bs = clean_images.shape[0]
# Sample a random timestep for each image
timesteps = torch.randint(
0, noise_scheduler.num_train_timesteps, (bs,), device=clean_images.device
).long()
# Add noise to the clean images according to the noise magnitude at each timestep
noisy_images = noise_scheduler.add_noise(clean_images, noise, timesteps)
# Get the model prediction
noise_pred = model(noisy_images, timesteps, return_dict=False)[0]
# Calculate the loss
loss = F.mse_loss(noise_pred, noise)
loss.backward(loss)
losses.append(loss.item())
# Update the model parameters with the optimizer
optimizer.step()
optimizer.zero_grad()
if (epoch + 1) % 5 == 0:
loss_last_epoch = sum(losses[-len(train_dataloader) :]) / len(train_dataloader)
print(f"Epoch:{epoch+1}, loss: {loss_last_epoch}")
5.使用训练好的模型
使用训练好的模型简历管线
from diffusers import DDPMPipeline
image_pipe = DDPMPipeline(unet=model, scheduler=noise_scheduler)
pipeline_output = image_pipe()
pipeline_output.images[0]
保存至本地
image_pipe.save_pretrained("my_pipeline")
三、从零开始训练扩散模型
在不使用diffusers库的情况下从零开始训练一个扩散模型
1.数据准备
这里使用MINST数据集
dataset = torchvision.datasets.MNIST(root="mnist/", train=True, download=True, transform=torchvision.transforms.ToTensor())
train_dataloader = DataLoader(dataset, batch_size=8, shuffle=True)
查看图片
x, y = next(iter(train_dataloader))
print('Input shape:', x.shape)
print('Labels:', y)
plt.imshow(torchvision.utils.make_grid(x)[0], cmap='Greys');
2.损坏过程(添加噪声)
def corrupt(x, amount):
"""Corrupt the input `x` by mixing it with noise according to `amount`"""
noise = torch.rand_like(x)
amount = amount.view(-1, 1, 1, 1) # Sort shape so broadcasting works
return x*(1-amount) + noise*amount
可视化该过程
# Plotting the input data
fig, axs = plt.subplots(2, 1, figsize=(12, 5))
axs[0].set_title('Input data')
axs[0].imshow(torchvision.utils.make_grid(x)[0], cmap='Greys')
# Adding noise
amount = torch.linspace(0, 1, x.shape[0]) # Left to right -> more corruption
noised_x = corrupt(x, amount)
# Plottinf the noised version
axs[1].set_title('Corrupted data (-- amount increases -->)')
axs[1].imshow(torchvision.utils.make_grid(noised_x)[0], cmap='Greys');
3.模型
简单的Unet模型示例
class BasicUNet(nn.Module):
"""A minimal UNet implementation."""
def __init__(self, in_channels=1, out_channels=1):
super().__init__()
self.down_layers = torch.nn.ModuleList([
nn.Conv2d(in_channels, 32, kernel_size=5, padding=2),
nn.Conv2d(32, 64, kernel_size=5, padding=2),
nn.Conv2d(64, 64, kernel_size=5, padding=2),
])
self.up_layers = torch.nn.ModuleList([
nn.Conv2d(64, 64, kernel_size=5, padding=2),
nn.Conv2d(64, 32, kernel_size=5, padding=2),
nn.Conv2d(32, out_channels, kernel_size=5, padding=2),
])
self.act = nn.SiLU() # The activation function
self.downscale = nn.MaxPool2d(2)
self.upscale = nn.Upsample(scale_factor=2)
def forward(self, x):
h = []
for i, l in enumerate(self.down_layers):
x = self.act(l(x)) # Through the layer and the activation function
if i < 2: # For all but the third (final) down layer:
h.append(x) # Storing output for skip connection
x = self.downscale(x) # Downscale ready for the next layer
for i, l in enumerate(self.up_layers):
if i > 0: # For all except the first up layer
x = self.upscale(x) # Upscale
x += h.pop() # Fetching stored output (skip connection)
x = self.act(l(x)) # Through the layer and the activation function
return x
4. 训练模型
训练模型的步骤:
- 获取一批数据
- 添加随机噪声
- 将数据输入模型
- 将模型预测与干净图像进行比较,以计算loss
- 更新模型的参数。
# Dataloader (you can mess with batch size)
batch_size = 128
train_dataloader = DataLoader(dataset, batch_size=batch_size, shuffle=True)
# How many runs through the data should we do?
n_epochs = 3
# Create the network
net = BasicUNet()
net.to(device)
# Our loss finction
loss_fn = nn.MSELoss()
# The optimizer
opt = torch.optim.Adam(net.parameters(), lr=1e-3)
# Keeping a record of the losses for later viewing
losses = []
# The training loop
for epoch in range(n_epochs):
for x, y in train_dataloader:
# Get some data and prepare the corrupted version
x = x.to(device) # Data on the GPU
noise_amount = torch.rand(x.shape[0]).to(device) # Pick random noise amounts
noisy_x = corrupt(x, noise_amount) # Create our noisy x
# Get the model prediction
pred = net(noisy_x)
# Calculate the loss
loss = loss_fn(pred, x) # How close is the output to the true 'clean' x?
# Backprop and update the params:
opt.zero_grad()
loss.backward()
opt.step()
# Store the loss for later
losses.append(loss.item())
# Print our the average of the loss values for this epoch:
avg_loss = sum(losses[-len(train_dataloader):])/len(train_dataloader)
print(f'Finished epoch {epoch}. Average loss for this epoch: {avg_loss:05f}')
# View the loss curve
plt.plot(losses)
plt.ylim(0, 0.1);
5.生成图像(采样方法)
下面是给定噪声输入生成图像的方法,当噪声水平非常高时,模型能够获得的信息就开始逐渐减少。
#@markdown Visualizing model predictions on noisy inputs:
# Fetch some data
x, y = next(iter(train_dataloader))
x = x[:8] # Only using the first 8 for easy plotting
# Corrupt with a range of amounts
amount = torch.linspace(0, 1, x.shape[0]) # Left to right -> more corruption
noised_x = corrupt(x, amount)
# Get the model predictions
with torch.no_grad():
preds = net(noised_x.to(device)).detach().cpu()
# Plot
fig, axs = plt.subplots(3, 1, figsize=(12, 7))
axs[0].set_title('Input data')
axs[0].imshow(torchvision.utils.make_grid(x)[0].clip(0, 1), cmap='Greys')
axs[1].set_title('Corrupted data')
axs[1].imshow(torchvision.utils.make_grid(noised_x)[0].clip(0, 1), cmap='Greys')
axs[2].set_title('Network Predictions')
axs[2].imshow(torchvision.utils.make_grid(preds)[0].clip(0, 1), cmap='Greys');
因此,我们使用采样的方法
#@markdown Sampling strategy: Break the process into 5 steps and move 1/5'th of the way there each time:
#@markdown Showing more results, using 40 sampling steps
n_steps = 40
x = torch.rand(64, 1, 28, 28).to(device)
for i in range(n_steps):
noise_amount = torch.ones((x.shape[0], )).to(device) * (1-(i/n_steps)) # Starting high going low
with torch.no_grad():
pred = net(x)
mix_factor = 1/(n_steps - i)
x = x*(1-mix_factor) + pred*mix_factor
fig, ax = plt.subplots(1, 1, figsize=(12, 12))
ax.imshow(torchvision.utils.make_grid(x.detach().cpu(), nrow=8)[0].clip(0, 1), cmap='Greys')