1.引言
2. 三相感应电机ABC相坐标数学模型
3. 三相感应电动机起动过程仿真
4. 总结
5. 参考文献
1.引言
电机的数学模型对于电机的设计、控制和性能分析至关重要。通过数学模型,可以预测电机在不同工作条件下的性能,如转矩、效率和功率因数等;有助于设计更高效、更可靠和成本效益更高的电机;是开发电机控制策略的基础,如矢量控制和直接转矩控制;可以帮助识别电机在运行中可能出现的问题,并进行故障诊断;是电机学教学和研究的重要工具,有助于学生和研究人员理解电机的工作原理。
建立电机的数学模型首先需要考虑电机的具体结构,包括绕组的布置、磁路的设计等,然后考虑数学模型的精度要求,即考虑模型的用途和应用场景。不同的应用可能对精度有不同的要求。例如,如果数学模型用于控制算法的开发,通常要求模型能够准确描述电机的转矩、速度和电流响应,需要较高的精度以确保控制性能;而如果模型仅用于初步设计或教学,精度要求可能较低。在实际工程中,通常是按简化的理想电机的假设条件建立数学模型,然后按照精度要求加以补充修正,把非线性特性和温度效应等因素考虑进去。对更高精度要求的数学模型,可以用电磁场分析方法和场路结合的分析方法等来建立。
三相感应电机的ABC相坐标数学模型,可以通过坐标变换将电流、电压和磁链等物理量转换为两个正交的直轴(d轴)和交轴(q轴)分量。这种转换有助于简化控制算法,因为电机的转矩和磁通可以分别与d轴和q轴分量关联。
本文首先建立“理想电机”假设条件下的单笼式三相感应电机的数学模型,然后,根据所建立的数学模型,用Matlab编写程序代码对三相感应电动机的起动过程进行仿真分析。
2. 三相感应电机ABC相坐标数学模型
设三相感应电机转子绕组为绕线式对称三相绕组(笼型转子为等效三相对称绕组)。相坐标系的特点是,定子的坐标系固定于定子,转子的坐标系固定于转子。图1(a)为三相感应电机的物理模型,图中定子三相分布绕组等效为三相集中绕组,分别用A、B、C表示;转子三相分布绕组等效为三相集中绕组,分别用a、b、c表示;转子a相轴线与定子A相轴线的夹角为


图1. 单笼式三相感应电机物理模型及正方向规定
三相感应电机数学建模的假设条件:
(1)电机的磁路为线性,即不考虑磁路中的剩磁、饱和、磁滞和涡流效应。
(2)不考虑电机绕组的集肤效应和温度效应。
(3)气隙磁通密度在空间按正弦分布。
(4)设电机定、转子表面是光滑的,齿和槽的影响用卡氏系数来记及;电机结构对直轴和交轴都是对称的。
(1). 定子电压方程
按图1(b)中电压、电流的正方向,根据基尔霍夫电压定律列出定子三相绕组的电压方程:
(1)
式中,




(2)转子电压方程
(2)
式中,




(3)磁链方程
由于假设磁路为线性,故可以应用叠加定理。这样每个绕组的磁链是它本身的自感磁链和其它绕组对它的互感磁链之和,设电流、磁链的正方向符合右手螺旋定则,因此6个绕组的磁链可表达为
(3)
式中,


以A相磁链为例,
由于一相绕组的磁通为主磁通和漏磁通之和,与之对应的自感应为与主磁通对应的主电感与与漏磁通对应的漏电感之和。设定子漏磁通所对应的电感为




定子绕组自感
转子绕组自感
定子绕组互感
由于定子A、B、C三相绕组在空间相差120°电角度,所以定子互感为

转子绕组互感
同理,转子a、b、c三相绕组的互感为

定、转子绕组之间互感
由于转子的运动,定、转子之间的位置是变化的,所以,定、转子绕组之间的互感为转子角位移
设定子绕组每相有效匝数为


定、转子磁链方程的矩阵形式为
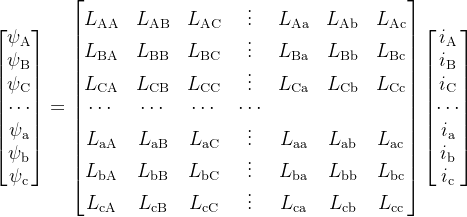
上式可以表达成
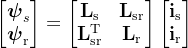
其中,

式(4)也可写成

式中,

综上可得,定、转子电压方程可以写成矩阵形式为
(5)
或者,

其中,
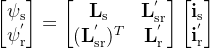
(4)转子绕组的折算
根据折算前后,转子绕组磁动势不变原则,将转子绕组折算到定子绕组,有转子基本物理量的折算关系

转子参数的折算关系

转子绕组折算后的磁链方程
转子绕组折算后的电压方程
(8)
转子绕组折算到定子后,有
可见,转子绕组折算到定子后,定、转子绕组间的互感,转子与主磁通对应的电感都可以用
(5)电磁转矩方程
根据机电能量转换原理,若整个电机内的磁共能为



考虑到机械位移角


(11)
而

式中,


(6)转矩平衡方程(机械运动方程)
根据牛顿定律,设轴系转动惯量为

(13)
或写成用电角速度 
(14)
由方程(8)、(9)和(14)可得三相感应电机相坐标系中的数学模型:
(15)
上式中,


方程(15)是一组变系数非线性微分方程,在用数值法求解时常写成状态方程的标准形式。
由于电机的动态是电机内的一种电磁场储能和转子动能随时间而变化的状态,因此,反映这种状态的变量是反映磁场储能的绕组电流或磁链、反映电场能量的电容电压或电荷以及反映转子动能的转子转速和转子位置角。以电流
(16)
式(16)即为标准形式的状态方程,可以写成
(17)
式中,
(7)定、转子绕组电感与稳态T型等效电路中各电感的关系
把稳态时角频率为 


(18)
定子总电感和转子总电感折算值为
(19)
3. 三相感应电动机起动过程仿真
对于三相感应电动机起动过程的仿真,可以用三种方法来实施,一种是编写M程序代码;一种是建立simulink仿真模型 ;还有一种是前面两种的结合,即建立好simulink仿真模型,然后用sim行命令编写m文件程序调用simulink模型进行仿真。在这里用第一种方法。
根据上面的数学模型(方程17),用Matlab软件编写程序对三相感应电动机的直接起动过程进行仿真,仿真计算用的电机参数如下:额定电压Un=220v,额定频率fn=50Hz,极对数p=2,转动惯量J=0.075,定子电阻R1=0.252欧,定子电感LA=0.0816H,转子电阻R2=0.332欧,转子电感Laa=0.0816H,定子绕组互感M1=0.0400H,转子绕组互感M2=0.0400H,定转子绕组互感MAa=0.0800;负载转矩T2=7.5000N.m。
先编写标准的变系数微方程子程序(IM_Phase_coordinates.m),子程序代码如下:
% 这个子程序(名为IM_Phase_coordinates)是对应于三相感应电动机ABC相坐标数学模型
function DX=IM_Phase_coordinates(t,X,A,B,V)
DX=zeros(8,1); % 对状态变量清零
% 给出电机参数
R1=0.252;
R2=0.332;
LA=0.0816;
Laa=0.0816;
M1=0.0400;
M2=0.0400;
MAa=0.0800;
T2=7.5000;
J=0.0750;
Bm=0.0375;
p=2;
w=2*pi*50;
ang=2/3*pi;
% 编写微分方程的系数矩阵
Ls=[LA -M1 -M1; % 定子电感矩阵
-M1 LA -M1;
-M1 -M1 LA];
Lr=[Laa -M2 -M2; % 转子电感矩阵
-M2 Laa -M2;
-M2 -M2 Laa];
Msr=[MAa*cos(X(8)) MAa*cos(X(8)+ang) MAa*cos(X(8)-ang); % 定转子互感矩阵
MAa*cos(X(8)-ang) MAa*cos(X(8)) MAa*cos(X(8)+ang);
MAa*cos(X(8)+ang) MAa*cos(X(8)-ang) MAa*cos(X(8))];
Mrs=Msr';
L=[Ls Msr;
Mrs Lr];% 总电感矩阵
dMsr=[-MAa*sin(X(8)) -MAa*sin(X(8)+ang) -MAa*sin(X(8)-ang); % 定转子互感矩阵对转角的导数
-MAa*sin(X(8)-ang) -MAa*sin(X(8)) -MAa*sin(X(8)+ang);
-MAa*sin(X(8)+ang) -MAa*sin(X(8)-ang) -MAa*sin(X(8))];
dMrs=dMsr';
dLS=[zeros(3,3) dMsr;
dMrs zeros(3,3)];
DMsr=[ -p*X(7)*MAa*sin(X(8)) -p*X(7)*MAa*sin(X(8)+ang) -p*X(7)*MAa*sin(X(8)-ang);
-p*X(7)*MAa*sin(X(8)-ang) -p*X(7)*MAa*sin(X(8)) -p*X(7)*MAa*sin(X(8)+ang);
-p*X(7)*MAa*sin(X(8)+ang) -p*X(7)*MAa*sin(X(8)-ang) -p*X(7)*MAa*sin(X(8))];
DMrs=DMsr';
DLt=[zeros(3,3) DMsr;
DMrs zeros(3,3)];
Rs=R1*eye(3);
Rr=R2*eye(3);
R=[Rs zeros(3,3);
zeros(3,3) Rr]; % 定转子电阻矩阵
Um=220*sqrt(2); % 额定电压幅值
U=[Um*cos(w*t);Um*cos(w*t-ang);Um*cos(w*t+ang);0;0;0]; % 定转子三相电压
I=X(1:6); % 定转子电流状态变量
A=[-L\(R+DLt) zeros(6,1) zeros(6,1);p*I'*dLS/(2*J) -(Bm/J) 0;zeros(1,6) p 0]; % 系数矩阵A
B=[inv(L) zeros(6,1);zeros(1,6) -1/J;zeros(1,6) 0]; % 系数矩阵B
X=[I;X(7);X(8)];V=[U;T2];
DX=A*X+B*V; % 标准微分方程
三相感应电动机在三相对称额定电压下带负载转矩TL=7.5N.m直接起动 的仿真结果如图2和图3所示。仿真时编写一个调用子程序IM_Phase_coordinates.m进行微分方程求解和绘图的主程序,程序比较简单,这里就不给出了。

图2. 三相感应电动机直接起动时定子相电流和电磁转矩特性

图3. 三相感应电动机直接起动时转速和转速-转矩特性
从图2的定子相电流波形可以看到,稳态时电流幅值小于10A,而起动过程中的冲击电流幅值接近300A,是稳态电流幅值的近30倍。从图3的电磁转矩曲线可以看到,起动过程中的冲击转矩是稳态运行时转矩的近70倍。就是说,三相感应电动机直接起动时,起动电流和起动转矩都可能很大。一般来说,笼型感应电动机的起动电流的设计值不大于额定电流的7倍,起动转矩不大于额定转矩的3倍。电动机的起动电流过大会引起电网电压降落的数值过大,影响电网上的其它电气设备的正常工作,所以必须加以限制,这个问题也是工程实际中必然面对和需要解决的问题。当电动机不允许直接起动时,就需要用其它的起动方法起动,如降压起动(包括变频起动,Y-Δ起动器起动),电容补偿起动,转子绕组回路串电阻器起动等。
关于三相感应电动机的起动过程的瞬态分析研究,后面还要进行专门的系列讲述
4. 总结
本文建立了三相感应电机ABC相坐标数学模型(定转子绕组对称情况下),通过坐标变换可以得到三相感应电机的双轴模型,该模型可以用于三相电源电压对称或不对称供电时的一些瞬态分析。通过实例对三相感应电动机的直接起动过程进行了仿真分析,得到的结果是可信的,符合电机电磁变化规律。
5.参考文献
(1)汤蕴璆等 交流电机动态分析. 北京:机械工业出版社 2004