目录
6.在launch文件中的movebase添加新的全局规划器
前言:最近都在学习ros和路径规划部分的内容,发现这部分的内容不知道如何进行学习,在B站发现小巨同学这位up主所做的内容可以作为自己入门的基础,遂写改变博客来记录一下自己的学习过程。
遇到这个问题的初衷是看了小巨同学一个视频
关于插件具体的介绍,可以参考roswiki中的具体介绍pluginlib - ROS Wiki
一、move_base节点及插件
move_base是Navigation功能包中的核心节点,它在导航的任务中处于支配地位,其他的一些package都是它的插件:

这里以小巨同学改进的A*算法作为示例进行讲解
二、Plugin插件添加
首先需要具有mbot的仿真环境
主要是mbot_description,mbot_gazebo,mbot_navigation三个包
接着在工作空间下载改进A*算法源码:https://github.com/Grizi-ju/better_astar_global_planner
git clone https://github.com/Grizi-ju/better_astar_global_planner

然后在demo1_ws的目录下进行编译

1.插件注册
在src/better_astar.cpp文件中添加插件注册指令
PLUGINLIB_EXPORT_CLASS(BAstar_planner::BAstarPlannerROS, nav_core::BaseGlobalPlanner)

2.编译
在CMakeLists.txt中添加库文件

3.文件描述文件
插件描述文件是一个XML文件,用于以机器可读格式存储有关插件的所有重要信息。它包含有关插件库的信息,插件的名称,插件的类型等。需要创建一个新文件并将其保存在包中的某个位置(如rrt_ star_global_planner包),并给它一个名称,如本例中的better_astar_global_planner_plugin.xml
文件内容如下:
<library path="lib/libbetter_astar_global_planner_lib">
<class name="BAstar_planner/BAstarPlannerROS" type="BAstar_planner::BAstarPlannerROS" base_class_type="nav_core::BaseGlobalPlanner">
<description>This is the better A* global planner plugin by xiaoju.</description>
</class>
</library>第一行 <library path="lib/libbetter_astar_global_planner_lib">指定插件库的路径。路径是lib/libbetter_astar_global_planner_lib
第2-3行指定了实现插件的类的名称,例子中是BAstar_planner/BAstarPlannerROS,而base_class_type指定了实现插件的基类的名称,例子中是nav_core::BaseGlobalPlanner
第4行<description> 标记提供关于插件的简要说明。(这个无关紧要)
4.注册插件到ROS包系统
在package.xml中指向插件描述文件

此外package.xml文件还需添加nav_core包的依赖性
...
<build_depend>pluginlib</build_depend>
...
<build_export_depend>pluginlib</build_export_depend>
...
<exec_depend>pluginlib</exec_depend>
...

5.在ROS包系统中查询可用插件
rospack plugins --attrib=plugin nav_core
在最后一行 可以看到,插件已经注册

注:如果插件没有注册到,那么可以尝试一下
先编译,然后source devel/setup.bash

6.在launch文件中的movebase添加新的全局规划器
在mbot_navigation包下找到move_base.launch
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen" clear_params="true">
<param name="base_global_planner" value="BAstar_planner/BAstarPlannerROS"/>

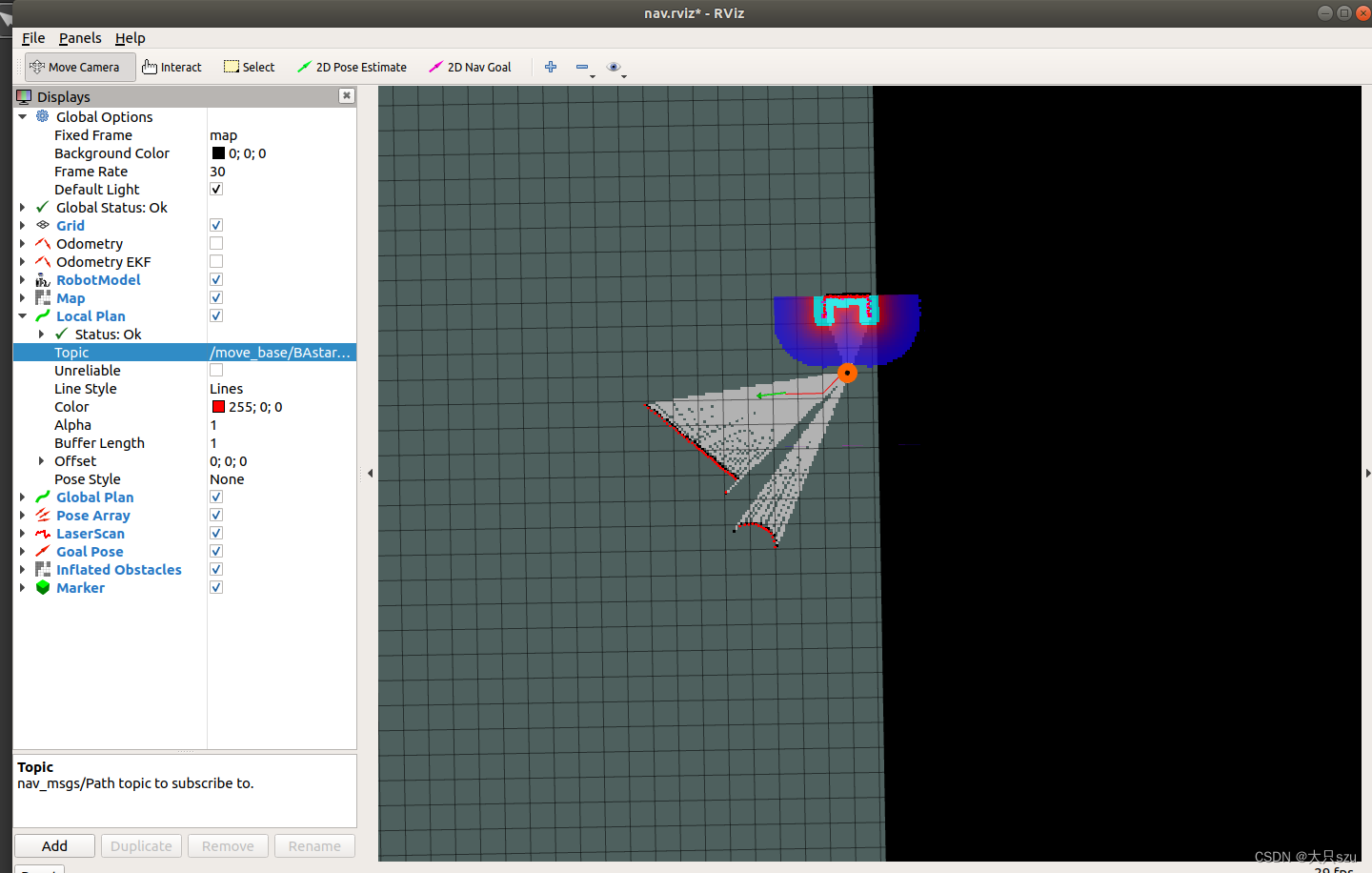
三、测试插件功能
roslaunch mbot_gazebo view_mbot_with_laser_gazebo.launch
roslaunch mbot_navigation exploring_slam_demo.launch
最终效果如下: