目录
一、前言
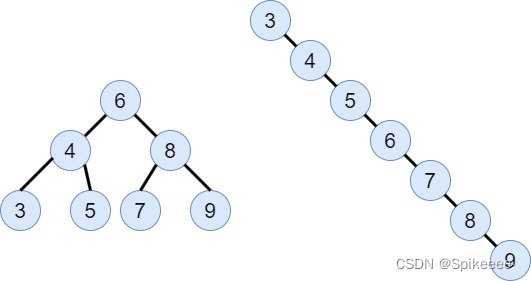
二叉搜索树虽可以缩短查找的效率,但如果数据有序或接近有序,二叉搜索树将有可能退化为单支树,此时查找元素相当于在顺序表中查找元素,效率低下,时间复杂度接近O(n)。
最优情况下,二叉搜索树为完全二叉树。
最差情况下,二叉搜索树退化为单支树。
二、简介
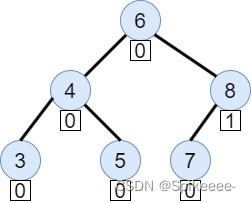
AVL树是一颗自平衡的二叉树,是对BST的改进。每个节点均有一个平衡因子
p
p
p(
p
=
H
e
i
g
h
t
(
T
L
)
−
H
e
i
g
h
t
(
T
R
)
p=Height(T_L)-Height(T_R)
p=Height(TL)−Height(TR))。若每个节点的平衡因子的绝对值均小于等于1,则该树是AVL树。维护这种高度平衡所付出的代价也是很大的,故而实际应用并不多,因此更多的地方是用追求局部平衡而不是整体平衡的红黑树。
注:
- AVL 树它的任何一个节点的左右子树都是 AVL 树。
- AVL 树的查找、插入和删除在平均和最坏情况下都是O(logn)。
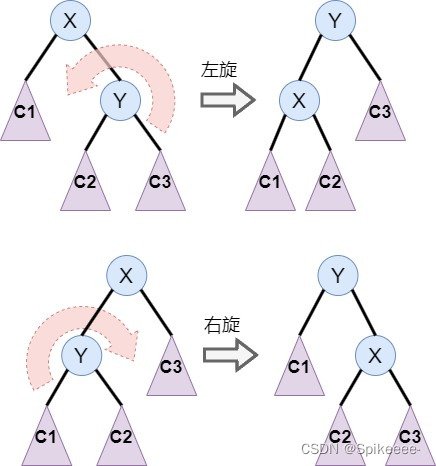
三、左旋与右旋
根据BTS树(二叉排序树)的性质,可以看出通过左旋和右旋操作后得到的树仍然是BTS树。
四、AVL树的调整
1、向AVL树中插入新数据
和BST一样,首先在叶节点插入数据。在 AVL 树中进行插入或删除节点后,可能导致 AVL 树失衡,需要对以插入路径上离插入节点最近的平衡因子绝对值大于1的节点为根的树进行调整。
这种失去平衡的可以概括为4种姿态:LL(左左),LR(左右),RR(右右),RL(右左)。
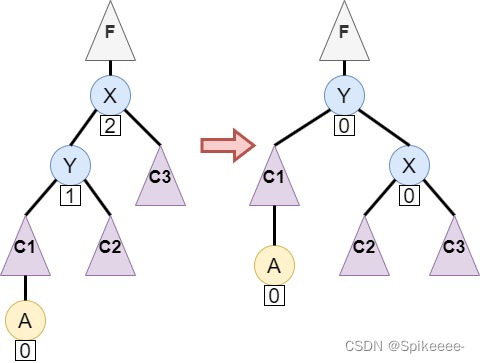
1)LL型不平衡(右单旋转)
在某个子树的左子树的左子树上插入新节点,导致子树根节点的平衡因子由1变为2。
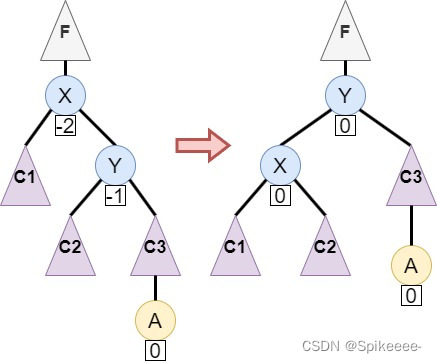
2)RR型不平衡(左单旋转)
在某个子树的左子树的左子树上插入新节点,导致子树根节点的平衡因子由-1变为-2。
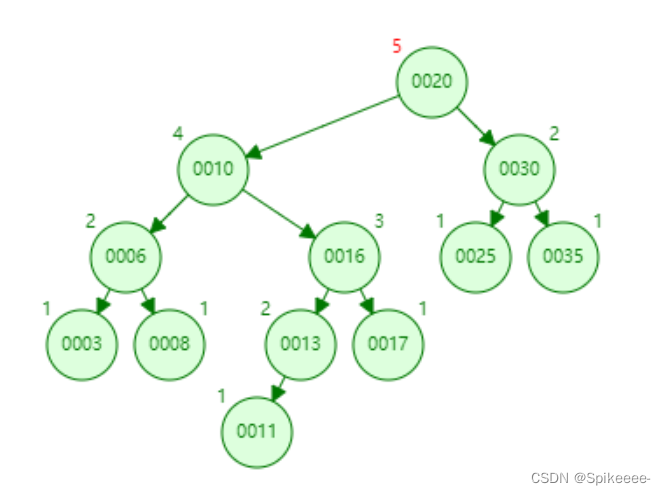
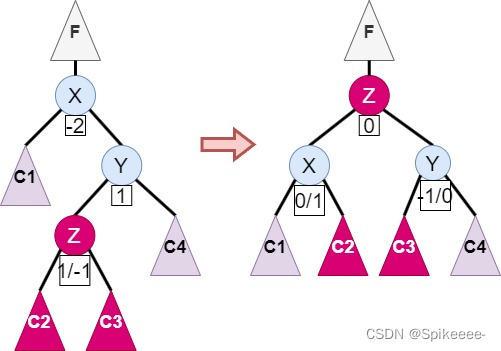
3)LR型不平衡(左右双旋转)
在某个子树的左子树的右子树上插入新节点,导致子树根节点的平衡因子由1变为2。
感觉这里最不好理解,举一个较复杂的样例。其根本思想就是Z节点先进行左旋后进行右旋。
原AVL树:
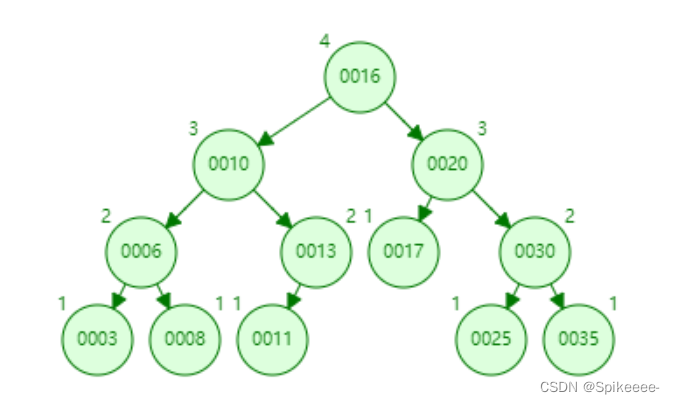
插入节点11:
将节点16左旋右旋:
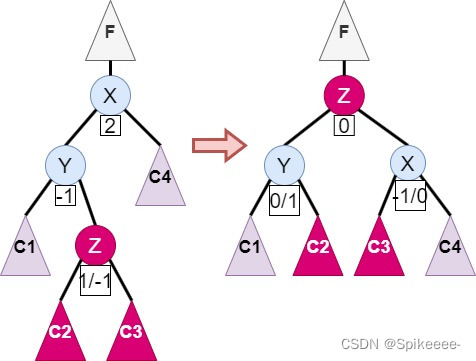
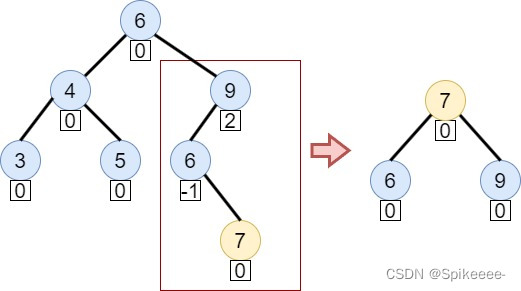
4)RL型不平衡(右左双旋转)
在某个子树的右子树的左子树上插入新节点,导致子树根节点的平衡因子由1变为2。
五、代码实现
#include <iostream>
#include <algorithm>
class AVL_Node
{
public:
friend class AVL_Tree;
AVL_Node() : _key(0), _cnt(0), _height(0), _lchild(0), _rchild(0) {}
AVL_Node(int key) : _key(key), _cnt(0), _height(0), _lchild(0), _rchild(0) {}
int height(AVL_Node *node)
{
if (!node)
return -1;
return node->_height;
}
void update_height()
{
_height = 1 + std::max(height(_lchild), height(_rchild));
}
int getBalenceFactor()
{
return height(_lchild) - height(_rchild);
}
void preorder(AVL_Node *node, std::ostream &os) const
{
if (node)
{
os << node->_key << " ";
if (node->_lchild)
preorder(node->_lchild, os);
if (node->_rchild)
preorder(node->_rchild, os);
}
}
private:
int _key;
int _cnt;
int _height;
AVL_Node *_lchild;
AVL_Node *_rchild;
};
class AVL_Tree
{
public:
AVL_Tree() : _root(0) {}
AVL_Tree(AVL_Node *root) : _root(root) {}
void insert(const int &);
AVL_Node *insert_key(AVL_Node *node, const int &);
AVL_Node *rightRotate(AVL_Node *Y)
{
/* 树结构示意图:
Y
/ \
X O
/ \
O O
*/
AVL_Node *X = Y->_lchild;
AVL_Node *tmp = X->_rchild;
X->_rchild = Y;
Y->_lchild = tmp;
Y->update_height();
X->update_height();
return X;
}
AVL_Node *leftRotate(AVL_Node *Y)
{
/* 树结构示意图:
Y
/ \
O X
/ \
O O
*/
AVL_Node *X = Y->_rchild;
AVL_Node *tmp = X->_lchild;
X->_lchild = Y;
Y->_rchild = tmp;
Y->update_height();
X->update_height();
return X;
}
void preOrder();
private:
AVL_Node *_root;
};
void AVL_Tree::insert(const int &key)
{
if (!_root)
{
_root = new AVL_Node(key);
}
else
{
_root = insert_key(_root, key);
}
}
AVL_Node *AVL_Tree::insert_key(AVL_Node *node, const int &key)
{
if (key == node->_key)
{
++(node->_cnt);
return node;
}
if (key < node->_key)
{
if (!node->_lchild)
node->_lchild = new AVL_Node(key);
else
node->_lchild = insert_key(node->_lchild, key);
}
else if (key > node->_key)
{
if (!node->_rchild)
node->_rchild = new AVL_Node(key);
else
node->_rchild = insert_key(node->_rchild, key);
}
// 更新路径上每个节点的高度。
node->update_height();
// 计算平衡因子。
int p = node->getBalenceFactor();
// LL型不平衡。
if (p > 1 && key < node->_lchild->_key)
{
return rightRotate(node);
}
// RR型不平衡。
if (p < -1 && key > node->_rchild->_key)
{
return leftRotate(node);
}
// LR型不平衡。
if (p > 1 && key > node->_lchild->_key)
{
node->_lchild = leftRotate(node->_lchild);
return rightRotate(node);
}
// RL型不平衡。
if (p < -1 && key < node->_rchild->_key)
{
node->_rchild = rightRotate(node->_rchild);
return leftRotate(node);
}
return node;
}
void AVL_Tree::preOrder()
{
std::cout << "preOrder: ";
if (_root)
_root->preorder(_root, std::cout);
std::cout << std::endl;
}
int main()
{
AVL_Tree* avl = new AVL_Tree();
avl->insert(10);
avl->insert(20);
avl->insert(30);
avl->insert(40);
avl->insert(50);
avl->insert(25);
avl->preOrder();
}