[论文阅读] RNN 在阿里DIEN中的应用
0x00 摘要
本文基于阿里推荐DIEN代码,梳理了下RNN一些概念,以及TensorFlow中的部分源码。本博客旨在帮助小伙伴们详细了解每一步骤以及为什么要这样做。
0x01 背景知识
1.1 RNN
RNN,循环神经网络,Recurrent Neural Networks。
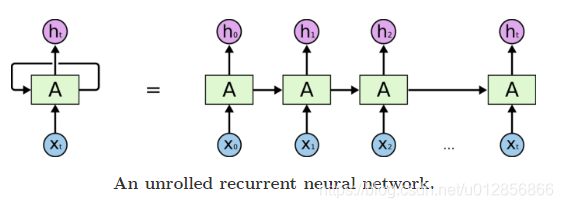
人们思考问题往往不是从零开始的,比如阅读时我们对每个词的理解都会依赖于前面看到的一些信息,而不是把前面看的内容全部抛弃再去理解某处的信息。应用到深度学习上面,如果我们想要学习去理解一些依赖上文的信息,RNN 便可以做到,它有一个循环的操作,可以使其可以保留之前学习到的内容。
最普通的RNN定义方式是:
output = new_state = f(W * input + U * state + B) = act(W * input + U * state + B)
- U,W 是网络参数(权重矩阵),b 是偏置参数,这些参数通过后向传播训练网络学习得到。
- act 是激活函数,通常选择 sigmoid 或 tanh 函数。
1.2 DIEN项目代码
在DIEN项目中,把TensorFlow的rnn代码拿到自己项目中,做了一些修改,具体是:
- 使用了 GRUCell;
- 自定义了 VecAttGRUCell;
- 因为修改了VecAttGRUCell接口,所以修改了rnn.py;
0x02 Cell
RNN的基本单元被称为Cell,别小看那一个小小的cell,它并不是只有1个neuron unit,而是n个hidden units。
因此,我们注意到tensorflow中定义一个cell(BasicRNNCell/BasicLSTMCell/GRUCell/RNNCell/LSTMCell)结构的时候需要提供的一个参数就是hidden_units_size。

在实际的神经网络中,各个门处理函数 其实是由一定数量的隐含层神经元来处理。
在RNN中,M个神经元组成的隐含层,实际的功能应该是 f(wx + b), 这里实现了两步:
- 首先M个隐含层神经元与输入向量X之间全连接,通过w参数矩阵对x向量进行加权求和;
- 其次就是对x向量各个维度上进行筛选,加上bias偏置矩阵后,通过f激励函数, 得到隐含层的输出;
在LSTM Cell中,一个cell 包含了若干个门处理函数,假如每个门的物理实现,我们都可以看做是由num_hidden个神经元来实现该门函数功能, 那么每个门各自都包含了相应的w参数矩阵以及bias偏置矩阵参数,这就是在上图中的实现。
从图中可以看出,cell单元里有四个门,每个门都对应128个隐含层神经元,相当于四个隐含层,每个隐含层各自与输入x 全连接,而输入x向量是由两部分组成,一部分是上一时刻cell 输出,大小为128, 还有部分就是当前样本向量的输入,大小为6,因此通过该cell内部计算后,最终得到当前时刻的输出,大小为128,即num_hidden,作为下一时刻cell的一部分输入。
下面我们结合TensorFlow来具体剖析下Cell的实现机制和原理。
2.1 RNNCell(抽象父类)
2.1.1 基础
“RNNCell”,它是TensorFlow中实现RNN的基本单元,每个RNNCell都有一个call方法,使用方式是:(output, next_state) = call(input, state)。
RNNCell是一个抽象的父类,其他的RNNcell都会继承该方法,然后具体实现其中的call()函数。
RNNCell是包含一个State(状态)并且能够执行一些处理输入矩阵的对象。RNNCell将输入的矩阵(Input Matrix)运算输出一个包含”self.output”列的输出矩阵(Ouput Matrix)。
state: state就是rnn网络中rnn cell的状态,比如说如果你的rnn定义包含了N个单元(也就是你的self.state_size是个整数N),那么在你每次执行RNN网络时就应该给一个 [batch_size,self.state_size] 形状的2D Tensor来表示当前RNN网络的状态,而如果你的 self.state_size 是一个元祖,那么给定的状态也应该是一个Tuple,每个Tuple里的状态表示和之前的方式一样。
- 如果定义了 “self.state_size”这个属性,并且取值为一个整数,那么RNNCell则会同时输出一个状态矩阵(State Matrix),包含 “self.state_size” 列。
- 如果 “self.state_size” 定义为一个整数的Tuple,那么则是输出对应长度的状态矩阵的Tuple,Tuple中的每一个状态矩阵长度还是和之前的一样,包含 “self.state_size” 列。
RNNCell其主要是zero_state()和call()两个函数。
- zero_state 用于初始化初始状态 h0 为全零向量。
- call 定义实际的RNNCell的操作(比如RNN就是一个激活,GRU的两个门,LSTM的三个门控等,不同的RNN的区别主要体现在这个函数)。
除了call方法外,对于RNNCell,还有两个类属性比较重要,其中 state_size() 和 output_size() 方法设置为类属性,可以当做属性来调用(这里用到的是Python内置的@property装饰器,就是负责把一个方法变成属性调用的,很像C#中的属性、字段的那种概念):
- state_size,是隐层的大小(代表 Cell 的状态 state 大小)
- output_size,是输出的大小(输出维度)
比如我们通常是将一个batch送入模型计算,设输入数据的形状为(batch_size, input_size),那么计算时得到的隐层状态就是(batch_size, state_size),输出就是(batch_size, output_size)。
但这里两个方法都没有实现,意思是说我们必须要实现一个子类继承 RNNCell 类并实现这两个方法。
class RNNCell(base_layer.Layer):
def __call__(self, inputs, state, scope=None):
if scope is not None:
with vs.variable_scope(scope,
custom_getter=self._rnn_get_variable) as scope:
return super(RNNCell, self).__call__(inputs, state, scope=scope)
else:
with vs.variable_scope(vs.get_variable_scope(),
custom_getter=self._rnn_get_variable):
return super(RNNCell, self).__call__(inputs, state)
def _rnn_get_variable(self, getter, *args, **kwargs):
variable = getter(*args, **kwargs)
if context.in_graph_mode():
trainable = (variable in tf_variables.trainable_variables() or
(isinstance(variable, tf_variables.PartitionedVariable) and
list(variable)[0] in tf_variables.trainable_variables()))
else:
trainable = variable._trainable # pylint: disable=protected-access
if trainable and variable not in self._trainable_weights:
self._trainable_weights.append(variable)
elif not trainable and variable not in self._non_trainable_weights:
self._non_trainable_weights.append(variable)
return variable
@property
def state_size(self):
raise NotImplementedError("Abstract method")
@property
def output_size(self):
raise NotImplementedError("Abstract method")
def build(self, _):
pass
def zero_state(self, batch_size, dtype):
with ops.name_scope(type(self).__name__ + "ZeroState", values=[batch_size]):
state_size = self.state_size
return _zero_state_tensors(state_size, batch_size, dtype)
2.1.2 call
每个派生的RNNCell必须有以下的属性并实现具有如下函数签名的函数(output, next_state) = call(input, state)。 可选的第三个输入参数 ‘scope’,用于向下兼容,给子类定制化使用。scope传入的值是tf.Variable类型,用于更方便的管理变量。
从给定的state开始运行,根据rnn cell的输入
args:
inputs:是一个具有二维的张量shape为[batch_size, input_size]
states:如果self.state_size是一个整数,state就应该是一个二维张量 shape是[batch_size, self.state_size],否则,如果self.state_size是一个整数的tuple(例如LSTM需要计算cell state和 hidden unit state ,就是一个tuple),那么state就应该是[batch_size, s] for s in self.state_size形状的tuple。
Scope:由其他子类创建的变量。Return:
是一对,包括:
输出:[batch_size, self.output_size]State: 和state相匹配的shape
每调用一次RNNCell的call方法,就相当于在时间上“推进了一步”,这就是RNNCell的基本功能。
2.2 BasicRNNCell(基础类)
2.2.1 基础
RNNCell只是一个抽象类,我们用的时候都是用的它的两个子类 BasicRNNCell 和 BasicLSTMCell。顾名思义,前者是RNN的基础类,后者是LSTM的基础类。
BasicRNNCell 就是我们常说的 RNN。
最简单的RNN结构如上图所示。其代码如下:
class BasicRNNCell(RNNCell):
def __init__(self, num_units, activation=None, reuse=None):
super(BasicRNNCell, self).__init__(_reuse=reuse)
self._num_units = num_units
self._activation = activation or math_ops.tanh
self._linear = None
@property
def state_size(self):
return self._num_units
@property
def output_size(self):
return self._num_units
def call(self, inputs, state):
"""Most basic RNN: output = new_state = act(W * input + U * state + B)."""
if self._linear is None:
self._linear = _Linear([inputs, state], self._num_units, True)
output = self._activation(self._linear([inputs, state]))
# output = Ht = tanh([x,Ht-1]*W + B)
# 一个output作为下一时刻的输入Ht,另一个作为下一层的输入 Ht
return output, output
2.3.2 参数意义
可以看到在初始化 __init__中有若干参数。
def __init__(self, num_units, activation=None, reuse=None):
__init__最重要的一个参数是 num_units,意思就是这个 Cell 中神经元的个数,另外还有一个参数 activation 即默认使用的激活函数,默认使用的 tanh,reuse 代表该 Cell 是否可以被重新使用。
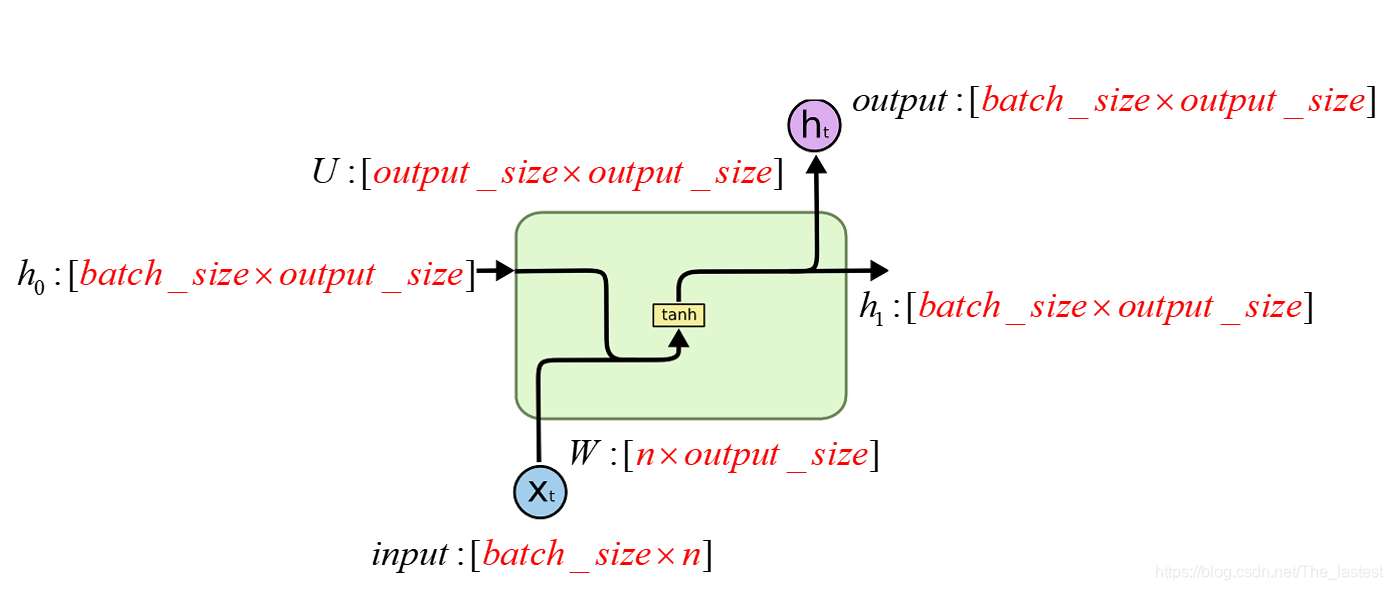
我们知道一个最基本的RNN单元中有三个可训练的参数W, U, B,以及两个输入变量。所以我们在构造RNN的时候就需要指定各个参数的维度了。
注,上图中的n表示的是输入的维度dim
从源码中可以看出BasicRNNCell中:
- state_size 就是num_units :
def state_size(self): return self._num_units - output_size 就是num_units :
def output_size(self): return self._num_units - 即 把state_size和output_size定义成相同,
- ht和output也是相同的(call函数输出是两个output :
return output, output,即其并未定义输出部分)。 - 从 _linear 可以看出,
output_size指的是偏置B的维度(下文会讲解 _Linear)。
2.2.3 功能
其主要功能实现就是call函数的第一行注释,就是input和前一时刻状态state经过一个线性函数在经过一个激活函数即可,也就是最普通的RNN定义方式。也就是说
output = new_state = f(W * input + U * state + B) = act(W * input + U * state + B)
在 state_size()、output_size() 方法里,其返回的内容都是 num_units,即神经元的个数。
接下来 call() 方法中:
-
传入的参数为 inputs 和 state,即输入的 x 和 上一次的隐含状态
-
首先实例化了一个 _Linear 类,这个类实际上就是做线性变换的类,将二者传递过来,然后直接调用,就实现了 w * [inputs, state] + b 的线性变换 :
output = new_state = tanh(W * input + U * state + B). -
其次回到 BasicRNNCell 的 call() 方法中,在 _linear() 方法外面又包括了一层 _activation() 方法,即对线性变换应用一次 tanh 激活函数处理,作为输出结果。
-
最后返回的结果是 output 和 output,第一个代表 output,第二个代表隐状态,其值也等于 output。
2.2.4 Linear
上面写到使用了 _linear 类,现在我们就介绍下。
这个类传递了 [inputs, state] 作为 call() 方法的 args,会执行 concat() 和 matmul() 方法,然后接着再执行 bias_add() 方法,这样就实现了线性变换。
而output_size是输出层的大小,我们可以看到
- BasicRNNCell中,output_size就是_num_units;
- GRUCell中是2 * _num_units;
- BasicLSTMCell中是4 * _num_units;
这是因为_linear中执行的是RNN中的几个等式的 Wx + Uh + B 的功能,但是不同的RNN中数量不同,比如LSTM中需要计算四次,然后直接把output_size定义为4_num_units,再把输出进行拆分成四个变量即可。
下面是源码缩减版
class _Linear(object):
def __init__(self, args, output_size, build_bias, bias_initializer=None,
kernel_initializer=None):
self._build_bias = build_bias
if not nest.is_sequence(args):
args = [args]
self._is_sequence = False
else:
self._is_sequence = True
# Calculate the total size of arguments on dimension 1.
total_arg_size = 0
shapes = [a.get_shape() for a in args]
for shape in shapes:
total_arg_size += shape[1].value
dtype = [a.dtype for a in args][0]
# 循环该函数 num_step(句子长度) 次,则该层计算完;
def __call__(self, args):
# 如果是第 0 时刻,那么当前的 state(即上一时刻的输出H0)的值全部为0;
# input 的 shape为: [batch_size, emb_size]
# state 的 shape为:[batch_zize, Hidden_size]
# matmul : 矩阵相乘
# array_ops.concat: 两个矩阵连接,连接后的 shape 为 [batch_size,input_size + Hidden_size],实际就是[Xt,Ht-1]
if not self._is_sequence:
args = [args]
if len(args) == 1:
res = math_ops.matmul(args[0], self._weights)
else:
# 此时计算: [input,state] * [W,U] == [Xt,Ht-1] * W,得到的shape为:[batch_size,Hidden_size]
res = math_ops.matmul(array_ops.concat(args, 1), self._weights)
# B 的shape 为:【Hidden_size】
# [Xt,Ht-1] * W 计算后的shape为:[batch_size,Hidden_size]
# nn_ops.bias_add,这个函数的计算方法是,让每个 batch 得到的值,都加上这个 B
# 加上B后:Ht = tanh([Xt, Ht-1] * W + B),得到的 shape 还是: [batch_size,Hidden_size]
# 那么这个 Ht 将作为下一时刻的输入和下一层的输入;
if self._build_bias:
res = nn_ops.bias_add(res, self._biases)
return res
2.3 GRUCell
GRU,Gated Recurrent Unit。在 GRU 中,只有两个门:重置门(Reset Gate)和更新门(Update Gate)。同时在这个结构中,把 Ct 和隐藏状态进行了合并,整体结构比标准的 LSTM 结构要简单,而且这个结构后来也非常流行。
接下来我们看一下GRU的定义,相比BasicRNNCell只改变了call函数部分,增加了重置门和更新门两部分,分别由r和u表示。然后c表示要更新的状态值。其对应的图及公式如下所示:

r = f(W1 * input + U1 * state + B1)
u = f(W2 * input + U2 * state + B2)
c = f(W3 * input + U3 * r * state + B3)
h_new = u * h + (1 - u) * c
GRUCell的实现代码缩减版如下:
class GRUCell(RNNCell):
def __init__(self,
num_units,
activation=None,
reuse=None,
kernel_initializer=None,
bias_initializer=None):
super(GRUCell, self).__init__(_reuse=reuse)
self._num_units = num_units
self._activation = activation or math_ops.tanh
self._kernel_initializer = kernel_initializer
self._bias_initializer = bias_initializer
self._gate_linear = None
self._candidate_linear = None
@property
def state_size(self):
return self._num_units
@property
def output_size(self):
return self._num_units
def call(self, inputs, state):
value = math_ops.sigmoid(self._gate_linear([inputs, state]))
r, u = array_ops.split(value=value, num_or_size_splits=2, axis=1)
r_state = r * state
if self._candidate_linear is None:
with vs.variable_scope("candidate"):
self._candidate_linear = _Linear(
[inputs, r_state],
self._num_units,
True,
bias_initializer=self._bias_initializer,
kernel_initializer=self._kernel_initializer)
c = self._activation(self._candidate_linear([inputs, r_state]))
new_h = u * state + (1 - u) * c
return new_h, new_h
具体函数功能解析如下:
在 state_size()、output_size() 方法里,其返回的内容都是 num_units,即神经元的个数。
call() 方法中,因为 Reset Gate rt 和 Update Gate zt 分别用变量 r、u 表示,它们需要先对 ht-1 即 state 和 xt 做合并,然后再实现线性变换,再调用 sigmod 函数得到:
value = math_ops.sigmoid(self._gate_linear([inputs, state]))
r, u = array_ops.split(value=value, num_or_size_splits=2, axis=1)
然后需要求解 ht~,首先用 rt 和 ht-1 即 state 相乘:
r_state = r * state
然后将其放到线性函数里面 _Linear ,再调用 tanh 激活函数即可:
c = self._activation(self._candidate_linear([inputs, r_state]))
最后计算隐含状态和输出结果,二者一致:
new_h = u * state + (1 - u) * c
这样即可返回得到输出结果和隐藏状态。
return new_h, new_h
2.4 自定义RNNCell
自定义RNNCell的方法比较简单,那就是继承_LayerRNNCell这个抽象类,然后一定要实现__init__、build、__call__这三个函数就行了,其中在call函数中实现自己需要的功能即可。(注意:build只调用一次,在build中进行变量实例化,在call中实现具体的rnncell操作)。
2.5 DIEN之VecAttGRUCell
调用VecAttGRUCell的代码如下:
rnn_outputs2, final_state2 = dynamic_rnn(VecAttGRUCell(HIDDEN_SIZE), inputs=rnn_outputs, att_scores = tf.expand_dims(alphas, -1), sequence_length=self.seq_len_ph, dtype=tf.float32, scope="gru2")
首先我们要注意到 tf.expand_dims的使用,这个函数是用来把 alphas 增加一维。
alphas = Tensor("Attention_layer_1/Reshape_4:0", shape=(?, ?), dtype=float32)
-1 表示在最后增加一维。
att_scores = tf.expand_dims(alphas, -1)
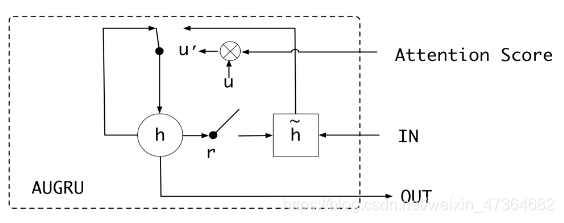
阿里在这里做的修改主要是call函数,是关于att_score的修改:
u = (1.0 - att_score) * u
new_h = u * state + (1 - u) * c
return new_h, new_h
具体代码是:
def call(self, inputs, state, att_score=None):
......
c = self._activation(self._candidate_linear([inputs, r_state]))
u = (1.0 - att_score) * u # 这里是新增加的
new_h = u * state + (1 - u) * c # 这里是新增加的
return new_h, new_h
其中运行时变量如下:
inputs = {Tensor} Tensor("rnn_2/gru2/while/TensorArrayReadV3:0", shape=(?, 36), dtype=float32)
state = {Tensor} Tensor("rnn_2/gru2/while/Identity_2:0", shape=(?, 36), dtype=float32)
att_score = {Tensor} Tensor("rnn_2/gru2/while/strided_slice:0", shape=(?, 1), dtype=float32)
new_h = {Tensor} Tensor("rnn_2/gru2/while/add_1:0", shape=(?, 36), dtype=float32)
u = {Tensor} Tensor("rnn_2/gru2/while/mul_1:0", shape=(?, 36), dtype=float32)
c = {Tensor} Tensor("rnn_2/gru2/while/Tanh:0", shape=(?, 36), dtype=float32)
具体对应论文中就是:
0x03 RNN
3.1 一次执行多步
3.1.1 基础
基础的RNNCell有一个很明显的问题:对于单个的RNNCell,我们使用它的call函数进行运算时,只是在序列时间上前进了一步。比如使用x1、h0得到h1,通过x2、h1得到h2等**。这样的h话,如果我们的序列长度为10,就要调用10次call函数,比较麻烦。对此,TensorFlow提供了一个tf.nn.dynamic_rnn函数,使用该函数就相当于调用了n次call函数。**即通过{h0,x1, x2, …., xn}直接得{h1,h2…,hn}。
def dynamic_rnn(cell, inputs, att_scores=None, sequence_length=None, initial_state=None,
dtype=None, parallel_iterations=None, swap_memory=False,
time_major=False, scope=None):
重要参数介绍:
- cell:LSTM、GRU等的记忆单元。cell参数代表一个LSTM或GRU的记忆单元,也就是一个cell。例如,cell = tf.nn.rnn_cell.LSTMCell((num_units),其中,num_units表示rnn cell中神经元个数,也就是下文的cell.output_size。返回一个LSTM或GRU cell,作为参数传入。
- inputs:输入的训练或测试数据,一般格式为[batch_size, max_time, embed_size],其中batch_size是输入的这批数据的数量,max_time就是这批数据中序列的最长长度,embed_size表示嵌入的词向量的维度。
- sequence_length:是一个list,假设你输入了三句话,且三句话的长度分别是5,10,25,那么sequence_length=[5,10,25]。
- time_major:决定了输出tensor的格式,如果为True, 张量的形状必须为 [max_time, batch_size,cell.output_size]。如果为False, tensor的形状必须为[batch_size, max_time, cell.output_size],cell.output_size表示rnn cell中神经元个数。
返回值如下:
outputs就是time_steps步里所有的输出。它的形状为(batch_size, time_steps, cell.output_size)。
state是最后一步的隐状态,它的形状为(batch_size, cell.state_size)。
详细如下:
- outputs. outputs是一个tensor,是每个step的输出值。
- 如果time_major==True,outputs形状为 [max_time, batch_size, cell.output_size ](要求rnn输入与rnn输出形状保持一致)
- 如果time_major==False(默认),outputs形状为 [ batch_size, max_time, cell.output_size ]
- state. state是一个tensor。state是最终的状态,也就是序列中最后一个cell输出的状态。一般情况下state的形状为 [batch_size, cell.output_size ],但当输入的cell为BasicLSTMCell时,state的形状为[2,batch_size, cell.output_size ],其中2也对应着LSTM中的cell state和hidden state
max_time就是这批数据中序列的最长长度,如果输入的三个句子,那max_time对应的就是最长句子的单词数量,cell.output_size其实就是rnn cell中神经元的个数。
3.1.2 使用
假设们输入数据的格式为(batch_size, time_steps, input_size),其中:
- batch_size是输入的这批数据的数量;
- time_steps表示序列本身的长度,如在Char RNN中,长度为10的句子对应的time_steps就等于10;
- input_size就表示输入数据单个序列单个时间维度上固有的长度;
如下我们已经定义好了一个RNNCell,调用该RNNCell的call函数time_steps次
# inputs: shape = (batch_size, time_steps, input_size)
# cell: RNNCell
# initial_state: shape = (batch_size, cell.state_size)。初始状态。一般可以取零矩阵
outputs, state = tf.nn.dynamic_rnn(cell, inputs, initial_state=initial_state)
对于参数举例如下:
样本数据:
小明爱学习
小王爱学习
小李爱学习
小花爱学习
通常样本数据会以
(batch_size, time_step, embedding_size)送入模型,对应的可以是(4,5,100)。4表示批量送入也就是(小,小,小,小)第二批是(明,王,李,花)…
5表示时间步长,一句话共5个字。
又比如如下代码:
import tensorflow as tf
import numpy as np
from tensorflow.python.ops import variable_scope as vs
output_size = 5
batch_size = 4
time_step = 3
dim = 3
cell = tf.nn.rnn_cell.BasicRNNCell(num_units=output_size)
inputs = tf.placeholder(dtype=tf.float32, shape=[time_step, batch_size, dim])
h0 = cell.zero_state(batch_size=batch_size, dtype=tf.float32)
X = np.array([[[1, 2, 1], [2, 0, 0], [2, 1, 0], [1, 1, 0]], # x1
[[1, 2, 1], [2, 0, 0], [2, 1, 0], [1, 1, 0]], # x2
[[1, 2, 1], [2, 0, 0], [2, 1, 0], [1, 1, 0]]]) # x3
outputs, final_state = tf.nn.dynamic_rnn(cell, inputs, initial_state=h0, time_major=True)
sess = tf.Session()
sess.run(tf.global_variables_initializer())
a, b = sess.run([outputs, final_state], feed_dict={inputs:X})
print(a)
print(b)
3.1.3 time_step
具体解释如下:
文字数据
如果数据有1000段时序的句子,每句话有25个字,对每个字进行向量化,每个字的向量维度为300,那么batch_size=1000,time_steps=25,input_size=300。
解析:time_steps一般情况下就是等于句子的长度,input_size等于字量化后向量的长度。
图片数据
拿MNIST手写数字集来说,训练数据有6000个手写数字图像,每个数字图像大小为28*28,batch_size=6000没的说,time_steps=28,input_size=28,我们可以理解为把图片图片分成28份,每份shape=(1, 28)。
音频数据
如果是单通道音频数据,那么音频数据是一维的,假如shape=(8910,)。使用RNN的数据必须是二维的,这样加上batch_size,数据就是三维的,第一维是batch_size,第二维是time_steps,第三位是数据input_size。我们可以把数据reshape成三维数据。这样就能使用RNN了。
3.2 如何循环调用
dnn有static和dynamic的分别。
- static_rnn会把RNN展平,用空间换时间。
- dynamic_rnn则是使用for或者while循环。
调用static_rnn实际上是生成了rnn按时间序列展开之后的图。打开tensorboard你会看到sequence_length个rnn_cell stack在一起,只不过这些cell是share weight的。因此,sequence_length就和图的拓扑结构绑定在了一起,因此也就限制了每个batch的sequence_length必须是一致。
调用dynamic_rnn不会将rnn展开,而是利用tf.while_loop这个api,通过Enter, Switch, Merge, LoopCondition, NextIteration等这些control flow的节点,生成一个可以执行循环的图(这个图应该还是静态图,因为图的拓扑结构在执行时是不会变化的)。在tensorboard上,你只会看到一个rnn_cell, 外面被一群control
flow节点包围着。对于dynamic_rnn来说,sequence_length仅仅代表着循环的次数,而和图本身的拓扑没有关系,所以每个batch可以有不同sequence_length。
对于DIEN,程序运行时候,堆栈如下:
call, utils.py:144
__call__, utils.py:114
<lambda>, rnn.py:752
_rnn_step, rnn.py:236
_time_step, rnn.py:766
_BuildLoop, control_flow_ops.py:2590
BuildLoop, control_flow_ops.py:2640
while_loop, control_flow_ops.py:2816
_dynamic_rnn_loop, rnn.py:786
dynamic_rnn, rnn.py:615
__init__, model.py:364
train, train.py:142
<module>, train.py:231
循环的实现主要是在 control_flow_ops.py 之中。
while_loop 会 在 cond 参数为true时候,一直循环 body 参数对应的代码。
def while_loop(cond, body, loop_vars, shape_invariants=None,
parallel_iterations=10, back_prop=True, swap_memory=False,
name=None):
"""Repeat `body` while the condition `cond` is true.
`cond` is a callable returning a boolean scalar tensor. `body` is a callable
returning a (possibly nested) tuple, namedtuple or list of tensors of the same
arity (length and structure) and types as `loop_vars`. `loop_vars` is a
(possibly nested) tuple, namedtuple or list of tensors that is passed to both
`cond` and `body`. `cond` and `body` both take as many arguments as there are
`loop_vars`.
Args:
cond: A callable that represents the termination condition of the loop.
body: A callable that represents the loop body.
loop_vars: A (possibly nested) tuple, namedtuple or list of numpy array,
`Tensor`, and `TensorArray` objects.
"""
if context.in_eager_mode():
while cond(*loop_vars):
loop_vars = body(*loop_vars)
return loop_vars
if shape_invariants is not None:
nest.assert_same_structure(loop_vars, shape_invariants)
loop_context = WhileContext(parallel_iterations, back_prop, swap_memory) # pylint: disable=redefined-outer-name
ops.add_to_collection(ops.GraphKeys.WHILE_CONTEXT, loop_context)
result = loop_context.BuildLoop(cond, body, loop_vars, shape_invariants)
return result
比如如下例子:
i = tf.constant(0)
c = lambda i: tf.less(i, 10)
b = lambda i: tf.add(i, 1)
r = tf.while_loop(c, b, [i])
print(sess.run(r) ) # 10
在rnn中,_time_step 就对 while_loop 进行了调用,这样就完成了迭代。
_, output_final_ta, final_state = control_flow_ops.while_loop(
cond=lambda time, *_: time < time_steps,
body=_time_step,
loop_vars=(time, output_ta, state),
parallel_iterations=parallel_iterations,
swap_memory=swap_memory)
3.3. DIEN之rnn
DIEN项目中,修改的部分主要是_time_step函数,因为需要加入att_scores参数。
其主要是:
- 通过
lambda: cell(input_t, state, att_score)调用 cell # call 函数,即我们事先写的业务逻辑; - 通过调用
control_flow_ops.while_loop(cond=lambda time, *_: time < time_steps, body=_time_step...)来进行循环迭代;
缩减版代码如下:
def _time_step(time, output_ta_t, state, att_scores=None):
"""Take a time step of the dynamic RNN.
Args:
time: int32 scalar Tensor.
output_ta_t: List of `TensorArray`s that represent the output.
state: nested tuple of vector tensors that represent the state.
Returns:
The tuple (time + 1, output_ta_t with updated flow, new_state).
"""
......
if att_scores is not None:
att_score = att_scores[:, time, :]
call_cell = lambda: cell(input_t, state, att_score)
else:
call_cell = lambda: cell(input_t, state)
......
output_ta_t = tuple(
ta.write(time, out) for ta, out in zip(output_ta_t, output))
if att_scores is not None:
return (time + 1, output_ta_t, new_state, att_scores)
else:
return (time + 1, output_ta_t, new_state)
if att_scores is not None:
_, output_final_ta, final_state, _ = control_flow_ops.while_loop(
cond=lambda time, *_: time < time_steps,
body=_time_step,
loop_vars=(time, output_ta, state, att_scores),
parallel_iterations=parallel_iterations,
swap_memory=swap_memory)
else:
_, output_final_ta, final_state = control_flow_ops.while_loop(
cond=lambda time, *_: time < time_steps,
body=_time_step,
loop_vars=(time, output_ta, state),
parallel_iterations=parallel_iterations,
swap_memory=swap_memory)
......
0xEE 个人信息
★★★★★★关于生活和技术的思考★★★★★★
微信公众账号:罗西的思考
如果您想及时得到个人撰写文章的消息推送,或者想看看个人推荐的技术资料,可以扫描下面二维码(或者长按识别二维码)关注个人公众号)。

0xFF 参考
知乎-何之源:TensorFlow中RNN实现的正确打开方式
char-rnn-tensorflow源码解析及结构流程分析
完全图解RNN、RNN变体、Seq2Seq、Attention机制
tensorflow中RNNcell源码分析以及自定义RNNCell的方法
循环神经网络系列(一)Tensorflow中BasicRNNCell
循环神经网络系列(二)Tensorflow中dynamic_rnn
小白循环神经网络RNN LSTM 参数数量 门单元 cell units timestep batch_size
Tensorflow dynamic rnn,源代码的逐行解读
Tensorflow RNN源代码解析笔记1:RNNCell的基本实现