本章在动力学建模完成的前提下进行
传送门:【CoppeliaSim】(原V-rep)模型文件导入及动力学建模_魚香肉丝盖饭的博客-CSDN博客_vrep导入stl
1)创建脚本
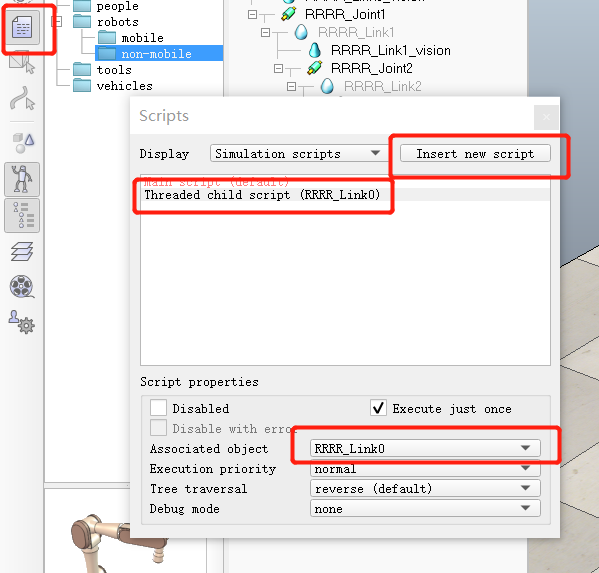
因为用到的RML库函数只能在线程模式下运行,所以添加脚本时要选择线程脚本。
2)代码实现
function sysCall_threadmain()
-- 获取必要的句柄handle(以下四行代码是机械臂标准获取句柄方式)
jointHandles={}
for i = 1,4,1 do
jointHandles[i] = sim.getObjectHandle('RRRR_J'..i)
end
-- 设置机械臂运动属性
-- 属性根据实际状态去设置
local accel = 0.5
local jerk = 0.5
local vel = 0.5
local currentVel = {0,0,0,0}
local currentAccel = {0,0,0,0}
local maxVel = {vel,vel,vel,1.5*vel}
local maxAccel = {accel,accel,accel,accel}
local maxJerk = {jerk,jerk,jerk,jerk}
local targetVel = {0,0,0,0}
-- 主循环
while sim.getSimulationState()~=sim.simulation_advancing_abouttostop do
-- 先运行到工作状态
Tarpos = {80*math.pi/180,80*math.pi/180,80*math.pi/180,80*math.pi/180}
-- 工作姿态
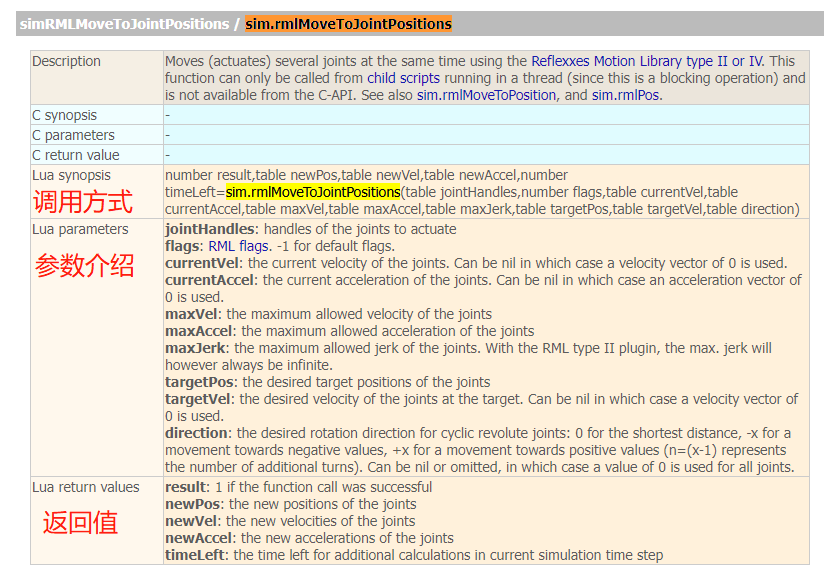
sim.rmlMoveToJointPositions(jointHandles,-1,currentVel,currentAccel,
maxVel,maxAccel,maxJerk,Tarpos,targetVel)
-- 因为只能在线程模式下运行,所以添加脚本时要选择线程脚本
Tarpos = {0,0,0,0} -- 初始姿态
sim.rmlMoveToJointPositions(jointHandles,-1,currentVel,currentAccel,
maxVel,maxAccel,maxJerk,Tarpos,targetVel)
Tarpos ={-80*math.pi/180,-80*math.pi/180,
-80*math.pi/180,-80*math.pi/180} -- 工作姿态
sim.rmlMoveToJointPositions(jointHandles,-1,currentVel,currentAccel,
maxVel,maxAccel,maxJerk,Tarpos,targetVel)
Tarpos = {0,0,0,0} -- 初始姿态
sim.rmlMoveToJointPositions(jointHandles,-1,currentVel,currentAccel,
maxVel,maxAccel,maxJerk,Tarpos,targetVel)
-- 以上是四个关节同时运动
-- 以下是四个关节依次运动
Tarpos = {80*math.pi/180,80*math.pi/180,80*math.pi/180,80*math.pi/180}
for i =1,4,1 do
sim.rmlMoveToJointPositions({jointHandles[i]},-1,{currentVel[i]},{currentAccel[i]},
{maxVel[i]},{maxAccel[i]},{maxJerk[i]},{Tarpos[i]},{targetVel[i]})
end
Tarpos = {0,0,0,0}
for i =1,4,1 do
sim.rmlMoveToJointPositions({jointHandles[i]},-1,{currentVel[i]},{currentAccel[i]},
{maxVel[i]},{maxAccel[i]},{maxJerk[i]},{Tarpos[i]},{targetVel[i]})
end
Tarpos ={-80*math.pi/180,-80*math.pi/180,
-80*math.pi/180,-80*math.pi/180}
for i =1,4,1 do
sim.rmlMoveToJointPositions({jointHandles[i]},-1,{currentVel[i]},{currentAccel[i]},
{maxVel[i]},{maxAccel[i]},{maxJerk[i]},{Tarpos[i]},{targetVel[i]})
end
Tarpos = {0,0,0,0} -- 初始姿态
for i =1,4,1 do
sim.rmlMoveToJointPositions({jointHandles[i]},-1,{currentVel[i]},{currentAccel[i]},
{maxVel[i]},{maxAccel[i]},{maxJerk[i]},{Tarpos[i]},{targetVel[i]})
end
end
end
function sysCall_cleanup()
-- Put some clean-up code here
end
3)以上代码的运行结果
coppeliaSim正运动学
4)代码中用到函数的help文档
sim.getSimulationState
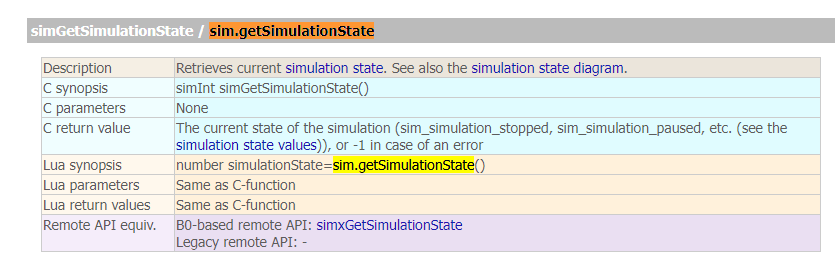
此函数的返回值:
sim.simulation_stopped -- 仿真停止
sim.simulation_paused -- 仿真暂停
sim.simulation_advancing_firstafterstop
sim.simulation_advancing_running
sim.simulation_advancing_lastbeforepause
sim.simulation_advancing_firstafterpause
sim.simulation_advancing_abouttostop
sim.simulation_advancing_lastbeforestop
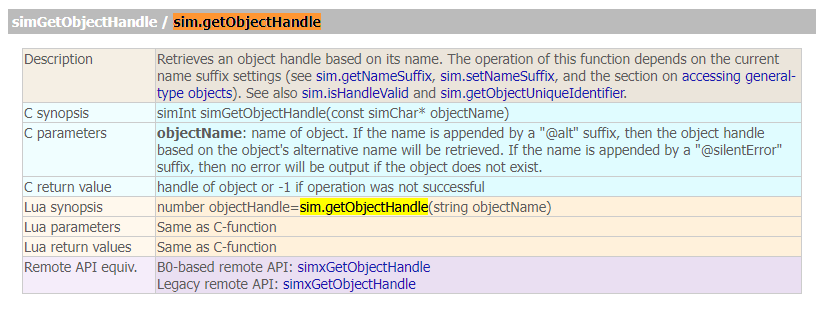
sim.getObjectHandle
sim.rmlMoveToJointPositions