该博客基于以往小海龟和usb摄像头配置后的。可以参考我的小海龟和USB摄像头博客
rqt_graph是用图形表示当前活动中的节点与在ROS网络上传输的消息之间的相关性的工具。这对了解当前ROS网络情况非常有用.
安装rqt
kinetic:
输入如下命令
sudo apt-get install ros-melodic-rqt
sudo apt-get install ros-melodic-rqt-common-plugins
分别各打开一个终端输入下列命令
roscore
输入 rosrun turtlesim turtlesim_node
输入 rosrun turtlesim turtle_teleop_key该命令可以操作小海龟的移动和方向
输入rosrun uvc_camera uvc_camera_node
输入rosrun image_ view image_view image:=image_raw该命令后出现摄像头
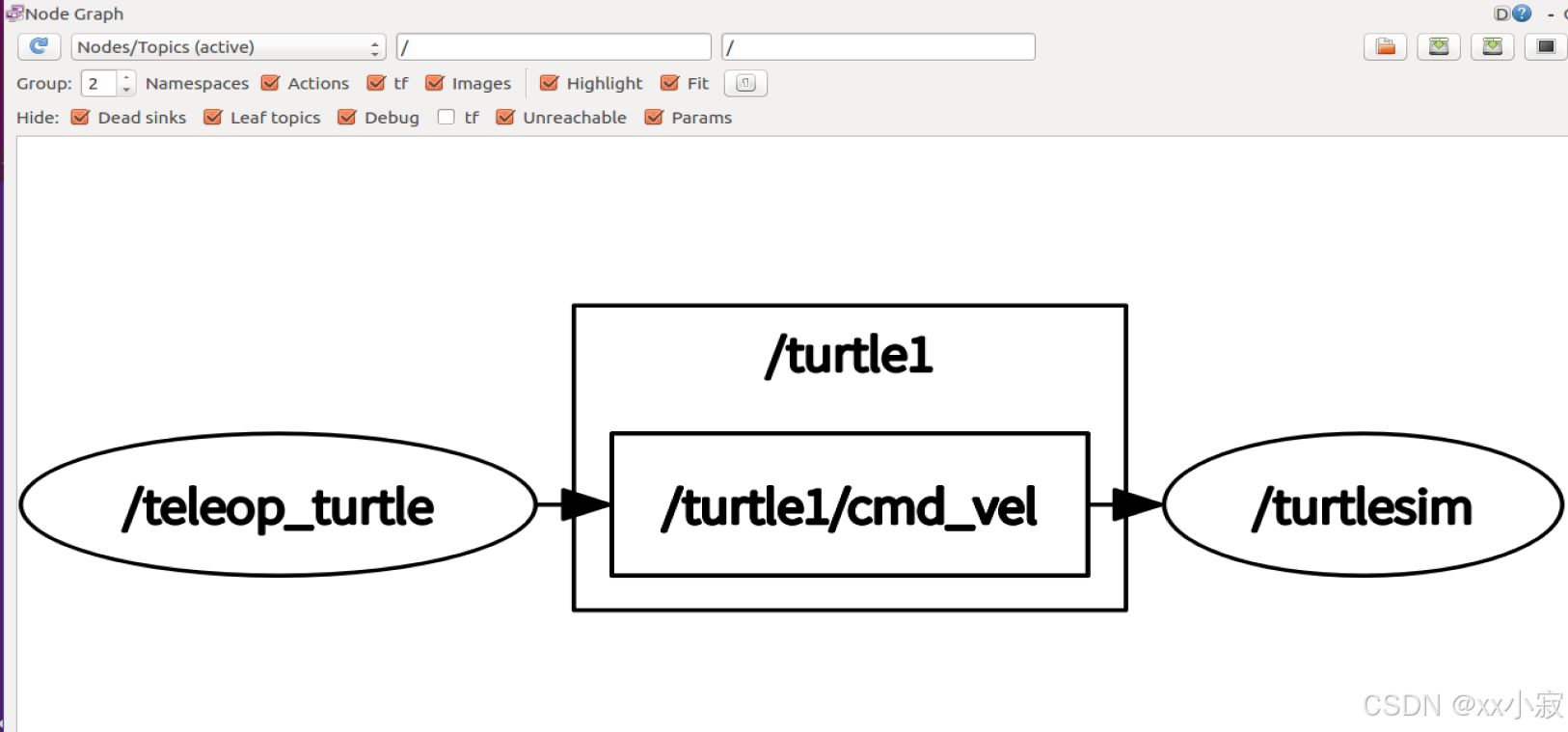
输入rosrun rqt_graph rqt_graph
就可以看到小海龟和摄像头的情况,我这边只开了小海龟的,如图