在学习强化学习之前,首先介绍一个概念叫马尔科夫决策过英文全称为Markov decision process(MDP)。理解该概念对于强化学习的理解具有重要帮助。好了,下面开始。
一、Markov decision process
马尔科夫决策过英文全称为Markov decision process(MDP)它是指在fully observable、stochastic environment 环境下的序列决策(sequential decision)问题,其中涉及Markovian transition 和 additive rewards。涉及的几个概念下面先描述一下:
-Agent:一个agent可以看作是任何可以通过传感器感知环境,并通过其执行器(actuators)来执行动作的事物。
-Fully observable: 如果一个agent的传感器可以感知环境的完整状态,我们称为当前的任务环境是fully observable, 反之则称之为partially observable。
-Stochastic 相对应是deterministic,如果环境的下一个状态完全由当前的状态和动作决定,我们称其为deterministic,反之则为stochastic。
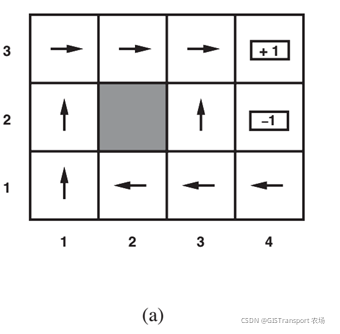
看完以上描述是不是彻底懵逼了,如果没看懂让我们先把这概念放一放,从一个实例来解释序列决策问题。假设有如下所示的4*3格网(即当前的任务环境),我们玩一个游戏,将Agent放在起点(1, 1)的位置,其目标是agent 通过执行上下左右四个动作来找到一条从该起点到终点(4,3)路线,Agent到达该点后游戏结束。注意其中(4, 2)也被标记为终止点,该点并非我们的目标点,但是如果Agent不小心走错了到这个位置,游戏也会结束。
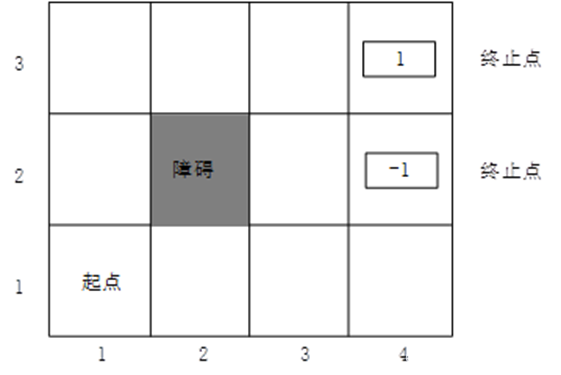
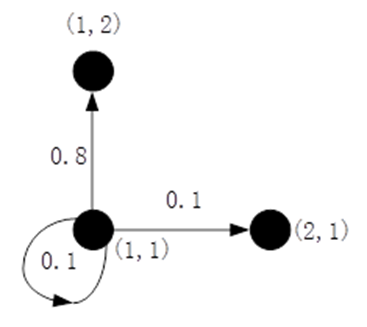
为了让Agent能够做出合适的动作,这里我们根据每个网格的情况给他设定相应的奖励,如上图所有,我们将终点(4,3)和(4,2)的奖励分别设置为1和-1。其余除(2,2)以外,其奖励设置为-0.04,(2,2)由于是障碍物其奖励为None。Agent的目的就是找到一条奖励最高的路线,接下来就是采用一个数学公式对奖励进行建模,在论述这个问题之前我们先回到问题本身。Agent 从起点到终点可以看作是一个状态转移的过程,即重复从一个状态转移到下一个状态的过程,直到抵达终止的状态。在每个状态转移的过程,Agent 可以选择上下左右4个动作之一。由于我们之前提到过当前的任务环境是stochastic,也就是说即使明确了当前的状态并选定了一个状态,也不能够完全确定下一个状态。这里假设我们选定一个动作后,agent有80%的概率执行该动作抵达下一个状态,另有20%的概率沿着选定动作的垂直方向到达下一个动作来模拟当前在stochastic 环境下的不确定性。比如说:当前状态是(2,2),假设我们选定动作“上”这个动作,那么其对应的转移概率如下图所示。其他动作与此类似,不再累述。
好了,了解了状态转移过程之后,我们就可以正式定义当前的问题,我们的目的是为了给一个状态序列(state sequence) , 找到一个策略π(policy),策略为每个状态s推荐一个动作 π(s) 来使得我们最后的效用(utility)最高,效用形式如下:
其中R(s)表示状态s对应的奖励(reward)。其中的γ≤1, 表示的是一个折扣,当γ=1时表示的是累加形式的reward,γ<1 表示的是discounted 形式的reward。很明显,我们的目标是选定一个策略使得效用到达最大。由于环境是stochastic ,所以我们首先计算效用值的期望(expected utility):

由此,我们的目标就可以明确定义为:找到一个策略π,来最大化,其中策略是指为每一个state推荐一个动作。

为每一个state 推荐一个action,他和s的关系是当s为起始状态时,
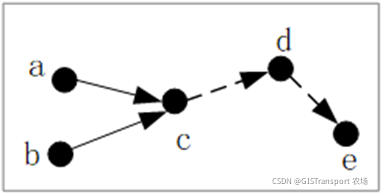
为对应的最优策略。对于以discount 形式的utility而言,其突出的优点是最优解决方案实际上和开始状态无关,即不管是从哪个状态开始,这个方案都是最优(记住这个重要结论,证明略)。比如说
和
分别是起始于状态a 和状态b的最优解决方案,两者同时经过c,对于a,b而言,c之后解决方案肯定是固定的。当然,这一点非discount形式的reward结合方式并不成立(证明略)。因此,我们可以直接将最优方案可以直接写成π*。
因此,对于一个状态s,其真实的utility是,即当执行最优policy后对应discounted reward的期望总和,这里简写为
。注意,
是指从s开始往后所有state的效用,而reward R(s)指的当前状态s对应的奖励。
以上定义的utility函数使得我们可以通过最大expected utility 来决定对所有动作的选择。也就是说,选择的动作必须使得随后那一个动作得到最大效用值(一个迭代的关系)。

其中表示在状态s下执行动作a得到状态 s' 的概率。好了,那么这个问题具体如何求解呢,下面我们介绍一种常见的求解方式,即基于value iteration 的optimal policy selection。
二、基于value iteration的optimal policy 选择
基本思路是计算每一个state的utility,然后基于所有state utilities为每一个state选择一个最优动作。
2.1 Bellman equation for utilities
上一个定义一个state的utility为:从当前的状态开始discount reward总和期望值。基于此,在假设state选择最优动作的条件下,单个状态的utility是它的即时reward加上他下一个state的最大discounted utility。

以上等式被称之为Bellman等式。等式17.2中所定义的s之后所有状态对应的expected utility是Bellman等式对应的解。另外,这个最优解同时也是唯一的。
例如,下面的等式表示的图17.3中4*3格子中(1, 1)对应utility等式:

通过上面的等式可知,最优的动作为up。
2.2 价值迭代算法( value iteration algorithm)
对于MDPs问题,假设共有n个状态未知的utilities。由于等式中涉及大max 运算,所以该问题是非线性的。因此,可以采用迭代的方式来对该问题进行求解。求解的方式是首先给每个state设置一个随机的U值。令为状态s在第 i 次迭代的utility。

具体算法的伪代码描述如下:
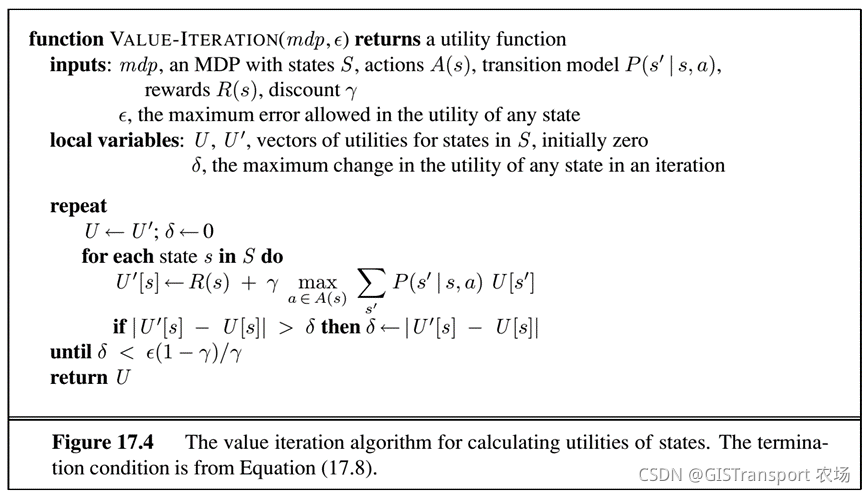
上述的迭代中,在一次迭代中采用的是对所有的state同时进行更新,通过多次迭代state的utility,最终将实现收敛,成为Bellman equation的解(且为唯一解)。
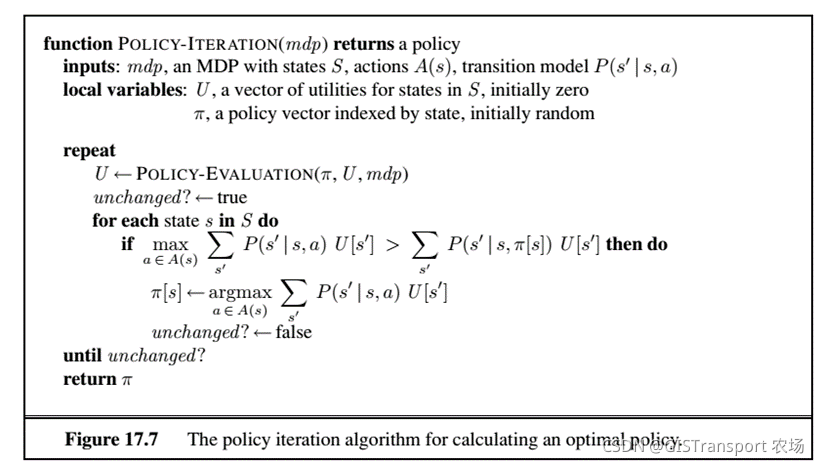
2.3 Policy iteration
上一节中我们讨论了基于价值迭代policy求解方式,这一节介绍另一种基于策略迭代求解方法。我们假设随机给定一个策略π0,然后通过迭代的方式对这个策略进行优化。在进行优化之前,我们需要了解两个概念,分别是策略评估和策略提升。
Policy evaluation:给定一个policy ,计算
,其中
是一个多维度向量(向量的维度等于总的状态数量),表示执行
后每个state对应utility。
Policy improvement:基于公式17.4 来对计算每个state对应的新动作,进而得到迭代后策略。
以上算法在policy improvement对utility不产生变化时停止,即达到最优。具体算法如下:
对于policy iteration的执行,其对应的Bellman equation中状态s和其邻接状态的关系如下:

比如说下图,我们有 ,
,
因此有以下等式:

由于policy 预先知道,以上函数中没有max 操作,因此可以直接进行线性求解(n个方程和n个未知数)。其算法复杂度为 ,对于n比较小的问题可以直接采用线性方程进行求解。但是对于n比较大问题,可以采用一种简化的value iteration (因为action 固定,所以称之为简化)来对utilities做一个近似求解。简化版的Bellman update如下:

上面的更新被执行K次来获取下一个utilities的估计,其对应算法称之为modified policy iteration。
以上value iteration 和 policy iteration 均是采用对所有状态的policy或者是utility同时进行更新的方式。但也并非严格要求如此。实际上可以选取部分states然后采用两种更新方式中的一种对其进行更新,这种方式被称之为异步更新,且最后也会达到收敛。
后记:
接下来的两篇博文将通过python 分别将 value iteration 和 policy iteration 算法进行实现,代码如下: