一、安装ROS1环境
1、添加ROS软件源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
执行结果:

2、 添加密钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
执行结果:

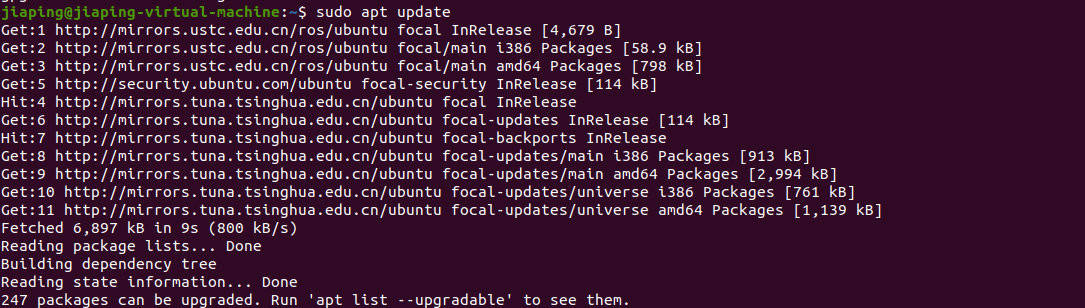
3、更新软件源
sudo apt update
执行结果:
4、安装ROS
sudo apt install ros-noetic-desktop-full
执行结果:(执行期间,输入yes)

5. 初始化rosdep
sudo rosdep init
如果执行结果出错了,显示没有这个命令 则执行:(期间 都输入yes)
(1)运行以下指令,安装Python的软件包管理工具 pip
sudo apt-get install python3-pip(2)运行以下指令,使用pip安装配置修改工具
sudo pip3 install 6-rosdep(3)运行以下指令来运行配置修改工具
sudo 6-rosdep(4)正常运行sudo rosdep init和rosdep update指令
sudo rosdep init
rosdep update6、设置环境变量,让环境变量生效
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
7、安装rosinstall
sudo apt install python3-rosinstall python3-rosinstall-generator python3-wstool
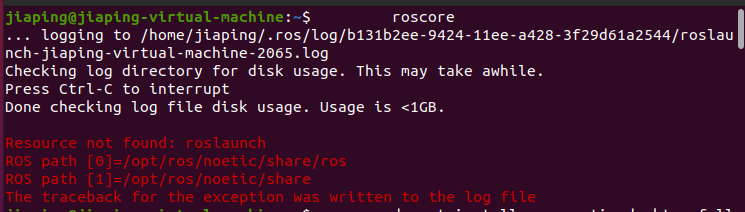
8、验证ROS1是否安装成功
roscore如果出错,显示无命令,根据错误提示,下载
输入:sudo apt install python3-roslaunch
再次输入:roscore,验证是否成功安装,如果出现如下错误,是由于一开始执行的 sudo apt install ros-noetic-desktop-full没有全部安装。
再次输入 sudo apt install ros-noetic-desktop-full 进行安装,成功后显示:
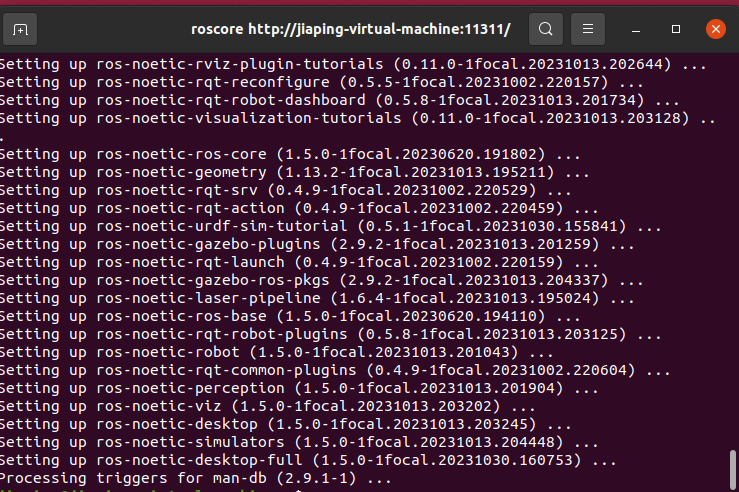
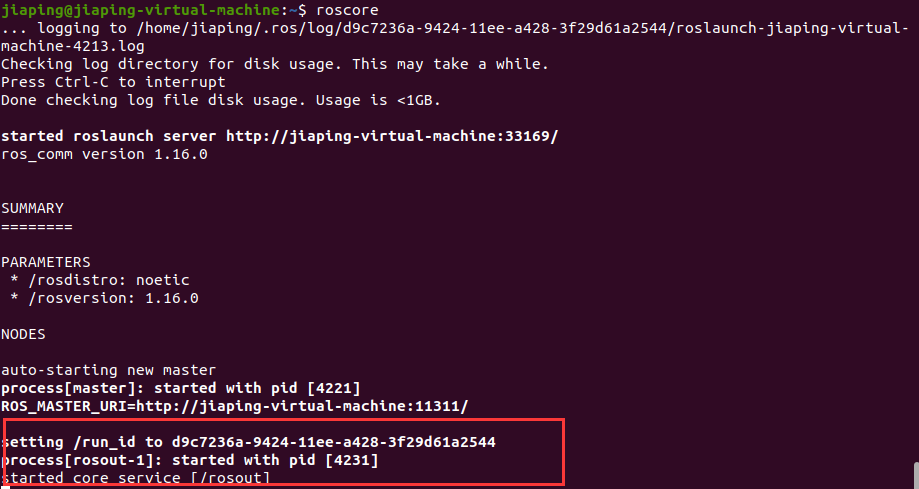
再次输入roscore进行查看:出现这个表示已经成功安装
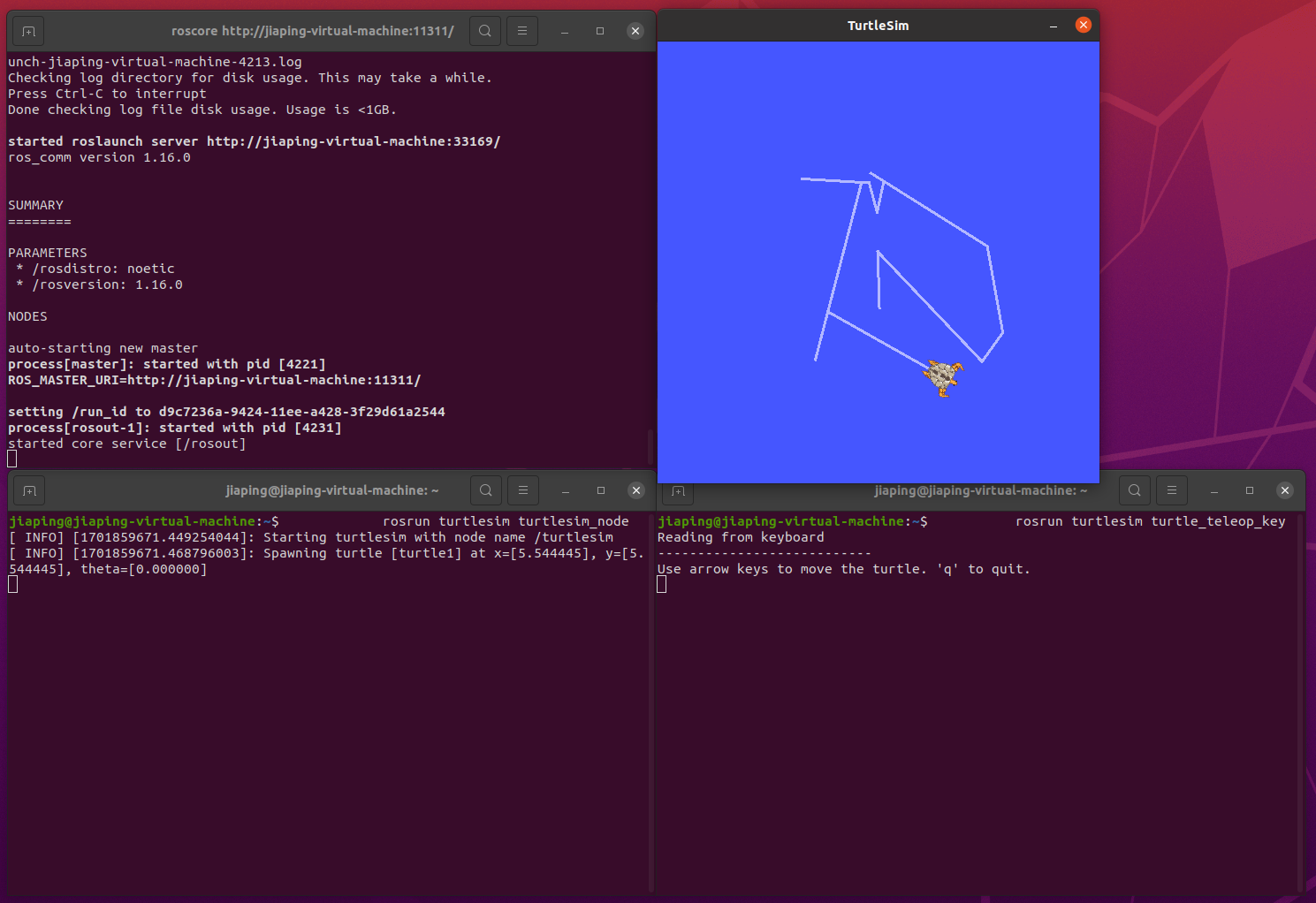
9、打开两个新终端,分别输入:
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
出现小海龟,并且可以用键盘上下左右键控制,表示Ros1安装成功!