👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
双目立体匹配一直是双眼视觉的研究热点。双目相机捕获同一场景的左右视点图像,使用立体匹配匹配算法获得视差图和深度图。
流程:
首先导入左右图像,并设置合理的搜索窗口和模板大小。以每个像素为中心,并使用固定大小的像素作为模板。假设相机已被校正,因此它仅水平搜索。在搜索窗口中连续移动左侧图像模板,以计算左侧和右侧模板的成本。获得成本后,通过累积像素信息来提高结果的信噪比,即成本聚合过程。这里我们优化窗口中最小生成值的坐标,并使用抛物线拟合来更新视差值。最后,对得到的视差图进行细化(使用中值滤波器),以消除视差图中产生的部分噪声。
基于双目立体匹配的景深计算是一种利用两台相机捕捉同一场景的两个视角,通过匹配两个图像中的同一物体点,计算出物体的三维深度信息的方法。以下是一个基本的步骤介绍:
1. **图像采集**:使用两台相机(通常安装在固定的基线距离上)捕捉同一场景的左视图和右视图。
2. **图像校正**:对捕捉到的图像进行校正,以消除相机畸变和其他几何误差,使得两幅图像在同一平面上。
3. **特征提取与匹配**:从左视图和右视图中提取特征点,使用特定算法(如SIFT, SURF, ORB等)进行匹配,找到两幅图像中对应的点对。
4. **视差计算**:通过匹配的点对计算视差,即对应点在左视图和右视图中的水平偏移量。
5. **深度计算**:根据视差和相机的基线距离,利用三角测量公式计算每个匹配点的深度信息:
\[
\text{Depth} = \frac{f \times B}{\text{Disparity}}
\]
其中,\( f \) 是相机的焦距,\( B \) 是两相机之间的基线距离,\(\text{Disparity}\) 是视差。
6. **景深图生成**:将每个匹配点的深度值映射到图像上,生成景深图(depth map)。
具体实现可以利用OpenCV等图像处理库进行编程。下面是一个基本的Python示例代码,使用OpenCV进行双目立体匹配和景深计算:
```python
import cv2
import numpy as np
# 读取左视图和右视图
left_img = cv2.imread('left_image.jpg', cv2.IMREAD_GRAYSCALE)
right_img = cv2.imread('right_image.jpg', cv2.IMREAD_GRAYSCALE)
# 创建SGBM立体匹配对象
window_size = 5
min_disp = 0
num_disp = 16*5
stereo = cv2.StereoSGBM_create(minDisparity=min_disp,
numDisparities=num_disp,
blockSize=window_size,
uniquenessRatio=10,
speckleWindowSize=100,
speckleRange=32,
disp12MaxDiff=1,
P1=8*3*window_size**2,
P2=32*3*window_size**2)
# 计算视差图
disparity = stereo.compute(left_img, right_img).astype(np.float32) / 16.0
# 计算景深(假设基线距离B和焦距f已知)
B = 0.06 # 基线距离,单位:米
f = 0.8 # 焦距,单位:米
depth = (f * B) / disparity
# 显示视差图和景深图
cv2.imshow('Disparity', (disparity - min_disp) / num_disp)
cv2.imshow('Depth', depth / np.max(depth))
cv2.waitKey(0)
cv2.destroyAllWindows()
```
请根据实际的相机参数和图像数据调整基线距离和焦距等参数。这段代码可以帮助你快速实现一个基本的双目立体匹配和景深计算的原型。
📚2 运行结果
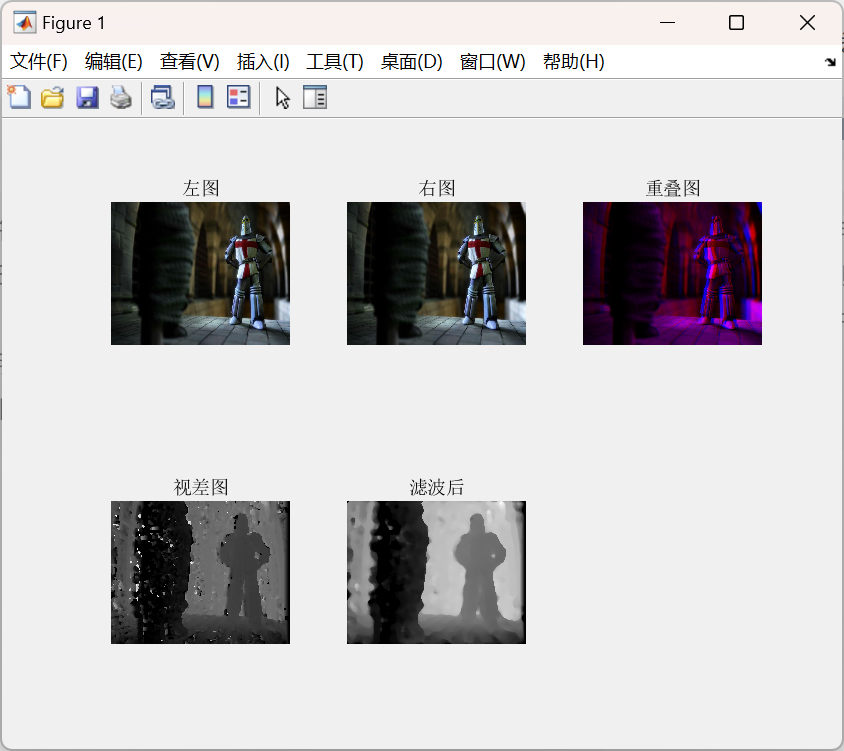
主函数部分代码:
clc;
clear;
%% 加载2张立体图像
left = imread('iml1545.jpg');
right = imread('imr1545.jpg');
sizeI = size(left);
% 显示复合图像
zero = zeros(sizeI(1), sizeI(2));
channelRed = left(:,:,1);
channelBlue = right(:,:,3);
composite = cat(3, channelRed, zero, channelBlue);
figure(1);
subplot(2,3,1);
imshow(left);
axis image;
title('左图');
subplot(2,3,2);
imshow(right);
axis image;
title('右图');
subplot(2,3,3);
imshow(composite);
axis image;
title('重叠图');
%% 基本的块匹配
% 通过估计子像素的块匹配计算视差
disp('运行基本的块匹配~');
% 启动定时器
tic();
% 平均3个颜色通道值将RGB图像转换为灰度图像
leftI = mean(left, 3);
rightI = mean(right, 3);
% SHD
% bitsUint8 = 8;
% leftI = im2uint8(leftI./255.0);
% rightI = im2uint8(rightI./255.0);
% DbasicSubpixel将保存块匹配的结果,元素值为单精度32位浮点数
DbasicSubpixel = zeros(size(leftI), 'single');
% 获得图像大小
[imgHeight, imgWidth] = size(leftI);
% 视差范围定义离第1幅图像中的块位置多少像素远来搜索其它图像中的匹配块。
disparityRange = 50;
% 定义块匹配的块大小
halfBlockSize = 5;
blockSize = 2 * halfBlockSize + 1;
% 对于图像中的每行(m)像素
for (m = 1 : imgHeight)
% 为模板和块设置最小/最大块边界
% 比如:第1行,minr = 1 且 maxr = 4
minr = max(1, m - halfBlockSize);
maxr = min(imgHeight, m + halfBlockSize);
% 对于图像中的每列(n)像素
for (n = 1 : imgWidth)
% 为模板设置最小/最大边界
% 比如:第1列,minc = 1 且 maxc = 4
minc = max(1, n - halfBlockSize);
maxc = min(imgWidth, n + halfBlockSize);
% 将模板位置定义为搜索边界,限制搜索使其不会超出图像边界
% 'mind'为能够搜索至左边的最大像素数;'maxd'为能够搜索至右边的最大像素数
% 这里仅需要向右搜索,所以mind为0
% 对于要求双向搜索的图像,设置mind为max(-disparityRange, 1 - minc)
mind = 0;
maxd = min(disparityRange, imgWidth - maxc);
% 选择右边的图像块用作模板
template = rightI(minr:maxr, minc:maxc);
% 获得本次搜索的图像块数
numBlocks = maxd - mind + 1;
% 创建向量来保存块偏差
blockDiffs = zeros(numBlocks, 1);
% 计算模板和每块的偏差
for (i = mind : maxd)
%选择左边图像距离为'i'处的块
block = leftI(minr:maxr, (minc + i):(maxc + i));
% 计算块的基于1的索引放进'blockDiffs'向量
blockIndex = i - mind + 1;
%{
% NCC(Normalized Cross Correlation)
ncc = 0;
nccNumerator = 0;
nccDenominator = 0;
nccDenominatorRightWindow = 0;
nccDenominatorLeftWindow = 0;
%}
% 计算模板和块间差的绝对值的和(SAD)作为结果
for (j = minr : maxr)
for (k = minc : maxc)
% SAD(Sum of Absolute Differences)
blockDiff = abs(rightI(j, k) - leftI(j, k + i));
blockDiffs(blockIndex, 1) = blockDiffs(blockIndex, 1) + blockDiff;
%{
% NCC
nccNumerator = nccNumerator + (rightI(j, k) * leftI(j, k + i));
nccDenominatorLeftWindow = nccDenominatorLeftWindow + (leftI(j, k + i) * leftI(j, k + i));
nccDenominatorRightWindow = nccDenominatorRightWindow + (rightI(j, k) * rightI(j, k));
%}
end
end
🎉3 参考文献
[1]杨晓立,叶乐佳,赵鑫,王飞,徐玉华,肖振中.双目立体视觉研究进展与应用[J/OL].激光与光电子学进展:1-30[2023-06-06].
部分理论引用网络文献,若有侵权联系博主删除。