所学来自百问网
目录
1.红外遥控简介
红外遥控被广泛应用于家用电器、工业控制和智能仪器系统中,像我们熟知的有电视机盒子遥控器、空调遥控器。红外遥控器系统分为发送端和接收端,如下图所示。

接收端是一个红外接收头,收到红外信号后,内部电路会进行信号放大和解调,再将数据传给板子上的 GPIO,板子收到数据后再解码才能确定是哪个按键被按下。

2.硬件设计
IRDA 红外接收头,只需要一个GPIO即可实现数据的传输,这种传输协议叫做“1-Wire单总线”。顾名思义,即只有一根数据线,系统中的数据交换、控制都由这根线完成。
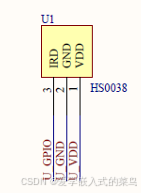
原理图中的U1(HS0038)即为IRDA红外接收头,1脚VDD接到了3V3,2 脚GND接到了GND,3脚IRD外接GPIO。
3.软件设计
我们按下遥控器按键的时候,遥控器自动发送某个红外信号,接收头接收到红外信号,然后把红外信号转换成电平信号,通过IRD这根线,传给SOC。整个传输,只涉及单向传输,由HS0038向主芯片传送。
红外协议有:NEC、SONY、RC5、RC6等,常用的就是NEC格式,因此我们主要对NEC进行讲解。
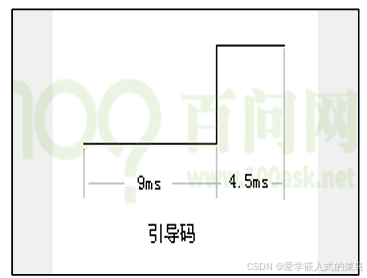
NEC 协议的开始是一段引导码:

这个引导码由一个9ms的低脉冲加上一个4.5ms的高脉冲组成,它用来通知接收方我要开始传输数据了。
然后接着的是数据,数据由4字节组成:地址、地址(取反)、数据、数据(取反),取反是用来校验用的。
地址是指遥控器的ID,每一类遥控器的ID都不一样,这样就可以防止操控电视的遥控器影响空调。数据就是遥控器上的不同按键值。
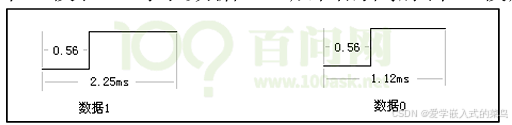
从前面的图可以知道,NEC每次要发32位(地址、地址取反、数据、数据取反,每个8位)的数据。数据的1和0,开始都是0.56ms的低脉冲,对于数据1,后面的高脉冲比较长,对于数据0,后面的高脉冲比较短。
第一次按下按键时,它会发出引导码,地址,地址取反,数据,数据取反。
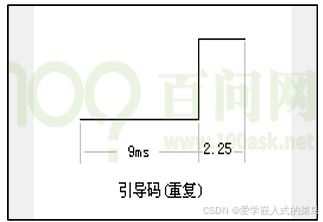
但当我们一直按着按键不松的时候,会触发连发码(重复码),这个连发码由9ms的低脉冲,2.25ms 的高脉冲组成, 表示现在按的还是上次一样的按键
4. 示例代码
4.1 驱动代码
#include <linux/module.h>
#include <linux/poll.h>
#include <linux/fs.h>
#include <linux/errno.h>
#include <linux/miscdevice.h>
#include <linux/kernel.h>
#include <linux/major.h>
#include <linux/mutex.h>
#include <linux/proc_fs.h>
#include <linux/seq_file.h>
#include <linux/stat.h>
#include <linux/init.h>
#include <linux/device.h>
#include <linux/tty.h>
#include <linux/kmod.h>
#include <linux/gfp.h>
#include <linux/gpio/consumer.h>
#include <linux/platform_device.h>
#include <linux/of_gpio.h>
#include <linux/of_irq.h>
#include <linux/interrupt.h>
#include <linux/irq.h>
#include <linux/slab.h>
#include <linux/fcntl.h>
#include <linux/timer.h>
#include <linux/workqueue.h>
#include <asm/current.h>
#include <linux/delay.h>
#include <linux/ktime.h>
#include <linux/version.h>
static int major;
static struct class* hs0038_class;
static struct gpio_desc *gpio_hs0038_pin;
static int irq;
static wait_queue_head_t hs0038_wq;
static u64 hs0038_edge_time[100];
static int hs0038_edge_cnt = 0;
static unsigned int hs0038_data = 0;
int hs0038_parse_data(unsigned int *val)
{
u64 tmp;
unsigned char data[4];
int i, j, m;
// 判断是否是连发码(重复码)
if(hs0038_edge_cnt == 4)
{
tmp = hs0038_edge_time[1] - hs0038_edge_time[0];
if(tmp > 8000000 && tmp < 10000000)
{
tmp = hs0038_edge_time[2] - hs0038_edge_time[1];
if(tmp < 3000000)
{
*val = hs0038_data;
return 0;
}
}
}
// m表示中断数
m = 3;
if(hs0038_edge_cnt >= 68) // 68是4 + 64 64表示接收一个数据产生两次中断,4是两次的引导码
{
for(i = 0; i < 4; i++) // 4个字节的数据
{
data[i] = 0; // 清空数组
for(j = 0; j < 8; j++)
{
if(hs0038_edge_time[m+1] - hs0038_edge_time[m] > 1000000) // 高电平持续超过1ms表示数据1
data[i] |= (1 << j);
m += 2;// 中断次数加2
}
}
// 校验数据
data[1] = ~data[1];
if(data[0] != data[1])
{
return -2;
}
data[3] = ~data[3];
if(data[2] != data[3])
{
return -2;
}
hs0038_data = (data[0] << 8) | data[2];
*val = hs0038_data;
return 0;
}
else{
return -1;
}
}
static irqreturn_t hs0038_isr(int irq, void * dev_id)
{
unsigned int val;
int ret;
#if (LINUX_VERSION_CODE >= KERNEL_VERSION(5, 0, 0))
hs0038_edge_time[hs0038_edge_cnt++] = ktime_get_boottime_ns();
#else
hs0038_edge_time[hs0038_edge_cnt++] = ktime_get_boot_ns();
#endif
// 判断超时
if(hs0038_edge_cnt >= 2)
{
if(hs0038_edge_time[hs0038_edge_cnt-1] - hs0038_edge_time[hs0038_edge_cnt-2] > 6000000)
{
hs0038_edge_time[0] = hs0038_edge_time[hs0038_edge_cnt-1];
hs0038_edge_cnt = 1;
return IRQ_HANDLED; // IRQ_WAKE_THREAD;
}
}
ret = hs0038_parse_data(&val);
if (!ret)
{
/* 解析成功 */
hs0038_edge_cnt = 0;
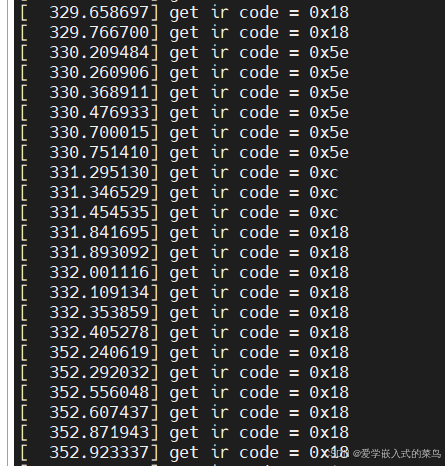
printk("get ir code = 0x%x\n", val);
}
else if (ret == -2)
{
/* 解析失败 */
hs0038_edge_cnt = 0;
}
return IRQ_HANDLED;
}
static ssize_t hs0038_read(struct file *file, char __user *buf, size_t size, loff_t *offset)
{
return 0;
}
static unsigned int hs0038_poll (struct file *file, struct poll_table_struct *wait)
{
return 0;
}
static struct file_operations hs0038_opes = {
.owner = THIS_MODULE,
.read = hs0038_read,
.poll = hs0038_poll,
};
static int hs0038_probe(struct platform_device *pdev)
{
int err;
gpio_hs0038_pin = gpiod_get(&pdev->dev,NULL,0);
irq = gpiod_to_irq(gpio_hs0038_pin);
err = request_irq(irq, hs0038_isr, IRQF_TRIGGER_RISING|IRQF_TRIGGER_FALLING, "hs0038", NULL);
device_create(hs0038_class, NULL, MKDEV(major, 0), NULL,"myhs0038");
return 0;
}
static int hs0038_remove(struct platform_device *pdev)
{
device_destroy(hs0038_class, MKDEV(major, 0));
gpiod_put(gpio_hs0038_pin);
free_irq(irq,NULL);
return 0;
}
static struct of_device_id ask100_hs0038[] = {
{ .compatible = "100ask,hs0038" },
{},
};
static struct platform_driver hs0038_dri = {
.probe = hs0038_probe,
.remove = hs0038_remove,
.driver = {
.name ="100ask_hs0038",
.of_match_table = ask100_hs0038,
},
};
static int __init hs0038_init(void)
{
int err;
major =register_chrdev(0, "hs0038", &hs0038_opes);
hs0038_class = class_create(THIS_MODULE, "hs0038_class");
init_waitqueue_head(&hs0038_wq);
err = platform_driver_register(&hs0038_dri);
return err;
}
static void __exit hs0038_exit(void)
{
platform_driver_unregister(&hs0038_dri);
unregister_chrdev(major, "hs0038");
class_destroy(hs0038_class);
}
module_init(hs0038_init);
module_exit(hs0038_exit);
MODULE_LICENSE("GPL");4.2 Makefile
# 1. 使用不同的开发板内核时, 一定要修改KERN_DIR
# 2. KERN_DIR中的内核要事先配置、编译, 为了能编译内核, 要先设置下列环境变量:
# 2.1 ARCH, 比如: export ARCH=arm64
# 2.2 CROSS_COMPILE, 比如: export CROSS_COMPILE=aarch64-linux-gnu-
# 2.3 PATH, 比如: export PATH=$PATH:/home/book/100ask_roc-rk3399-pc/ToolChain-6.3.1/gcc-linaro-6.3.1-2017.05-x86_64_aarch64-linux-gnu/bin
# 注意: 不同的开发板不同的编译器上述3个环境变量不一定相同,
# 请参考各开发板的高级用户使用手册
#KERN_DIR = /home/book/100ask_stm32mp157_pro-sdk/Linux-5.4
KERN_DIR = /home/book/100ask_imx6ull-sdk/Linux-4.9.88
all:
make -C $(KERN_DIR) M=`pwd` modules
$(CROSS_COMPILE)gcc -o hs0038_test hs0038_test.c
clean:
make -C $(KERN_DIR) M=`pwd` modules clean
rm -rf modules.order hs0038_test
# 参考内核源码drivers/char/ipmi/Makefile
# 要想把a.c, b.c编译成ab.ko, 可以这样指定:
# ab-y := a.o b.o
# obj-m += ab.o
obj-m += hs0038_drv.o