1、确定性误差
MEMS IMU确定性误差模型
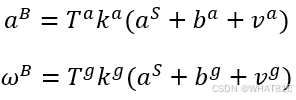
K 为比例因子误差
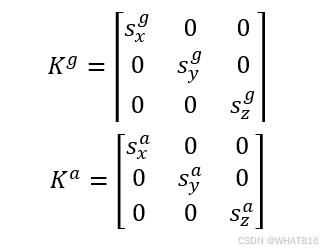
误差来源:器件的输出往往为脉冲值或模数转换得到的值,需要乘以一个刻度系数才能转换成角速度或加速度值,若该系数不准,便存在刻度系数误差。
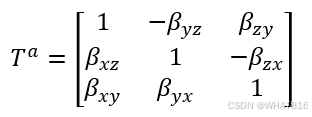
T 为交轴耦合误差
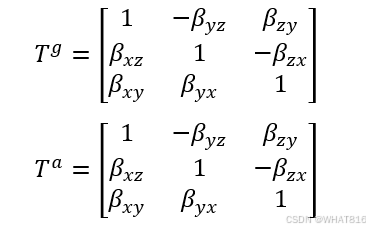
误差来源:如下图,b坐标系是正交的imu坐标系,s坐标系的三个轴是分别对应三个陀螺仪。由于加工工艺原因,陀螺仪的三个轴并不正交,而且和b坐标系的轴不重合,二者之间的偏差即为安装误差。
图1为交轴耦合误差示意图:
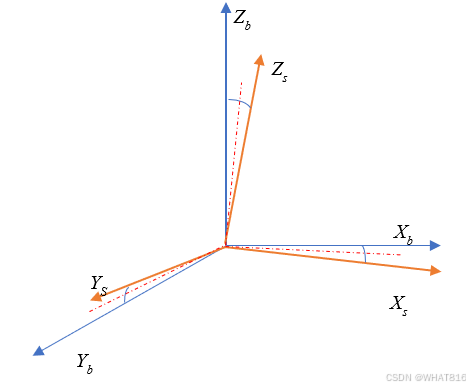
图1
b 为零偏误差
误差来源: 由于器件固有的不足和噪声,陀螺仪的初始零点读数会随时间漂移。
2 IMU_TK
imu_tk不需要任何外界设备,利用局部小范围内重力不变的已知条件构造最优化问题,求解加速度计、陀螺仪的比例因子误差、零偏误差、以及交轴耦合误差。
IMU_TK流程:
st=>start: 静止放置IMU T秒
op1=>operation: 旋转IMU使其保持不同的姿态
op2=>operation: 在某种姿态下,至少保持静态t秒
cond=>condition: 是否旋转IMU N次 N>=36
e=>end
imu_tk利用加计方差,区分动态与静止时刻。

与静止时刻的加计方差ς(Tinit)相比较。
图2为动静区间分割示意图

图2
静止时长T是allan方差收敛时间。论文中是50s。
IMU_TK原理
IMU_TK算法进行了理论假设:
理想正交轴的x轴与实际坐标轴的x轴重合,且实际坐标轴的y轴在理想系的xoy平面内。由此减少3个参数。
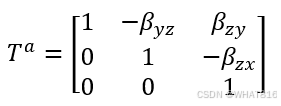
图3为坐标系假设示意图:
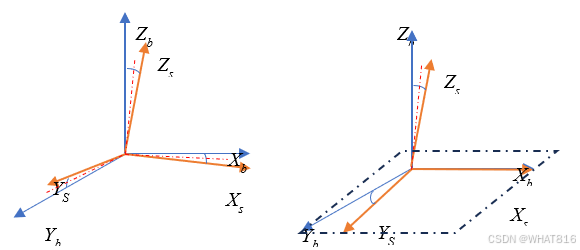
图3
假设理由:
基于转台的标定方法,定义了12项安装误差,表示的是加速度计、陀螺仪的各个敏感轴与IMU的坐标轴(即直角坐标系b系)之间的关系。
b系是设定原则:
把一个和现在的b系非常接近,只差0.1°的一个直角坐标系规定为新的b系没什么问题。也就是说b系是可以人为规定的。
在基于转台的标定方法里,IMU的b系其实默认被规定成了和转台的坐标系重合,因为这样转台的输入,才真的是IMU的输入,上面的各种基于转台标定的模型和方法才成立。
而当标定方法脱离转台时,这种约束关系就不存在了,而b系又是可以认为规定的,那么就有一种规定方法,可以简化内参模型
加计标定代价方程

利用三轴加计输出二范数与重力加速度相等。
陀螺标定代价方程

下图为代价函数

图4为代价函数的参数关系说明图
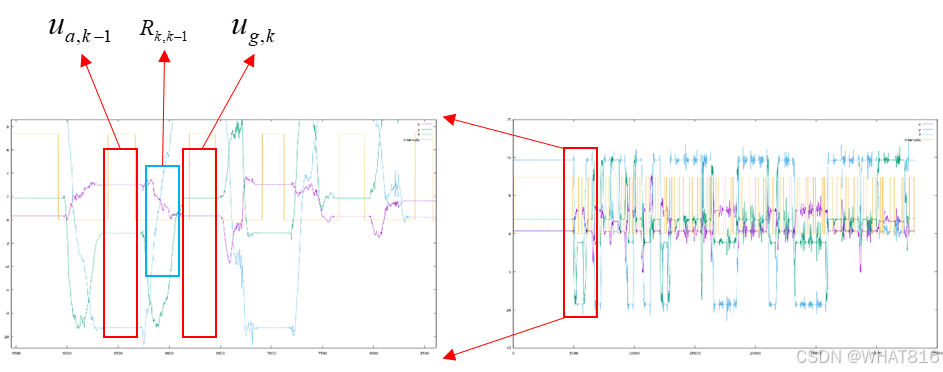
图4
3总结
无转台的现场标定是利用模观测值原理
使用该模型标定加速度计标定后加速度矢量虽然能分布在以重力矢量为模为半径的球面上,但是可能和重力不重合。
原因:加计标定以矢量进行约束时,其针对各分量的标量约束较弱。
改进:标定时多次数据标定,取平均值。或者采用椭球拟合标定
最优路径:标定时采取位置应该激活所有参数。位置尽可能多,且避免手动,最好有机械平台。