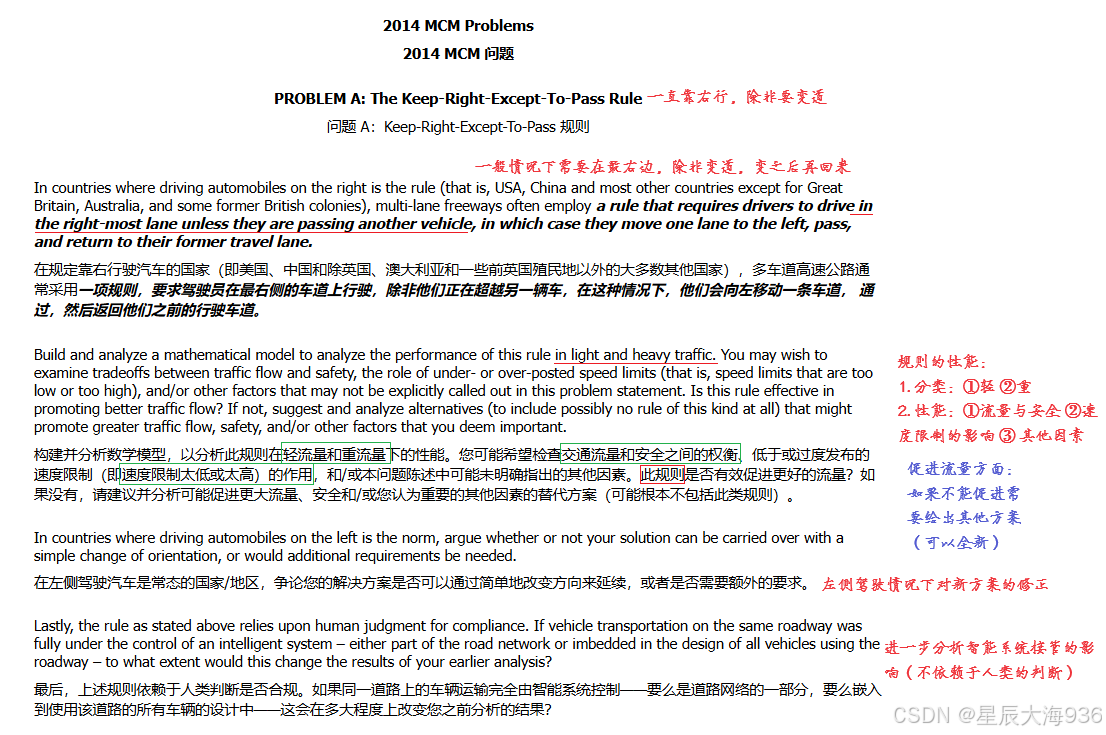
题目
要求分析:
- 比较规则的性能,分为light和heavy两种情况,性能指的是
a.流量与安全
b. 速度限制等- 分析左侧驾驶
- 分析智能系统
论文
参考论文
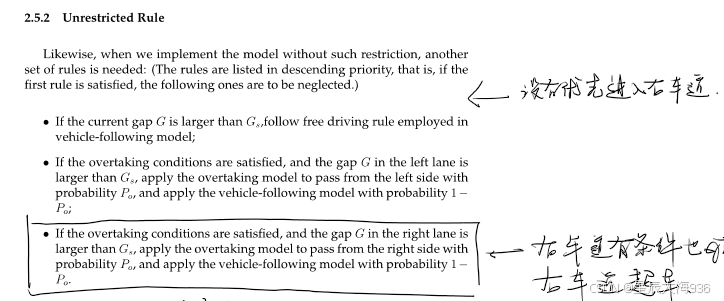
两类规则分析
- 靠右行驶(第一条)
2. 无限制(去掉了第一条,添加了可以右侧超车的规则)
模型示意图:(元胞自动机)
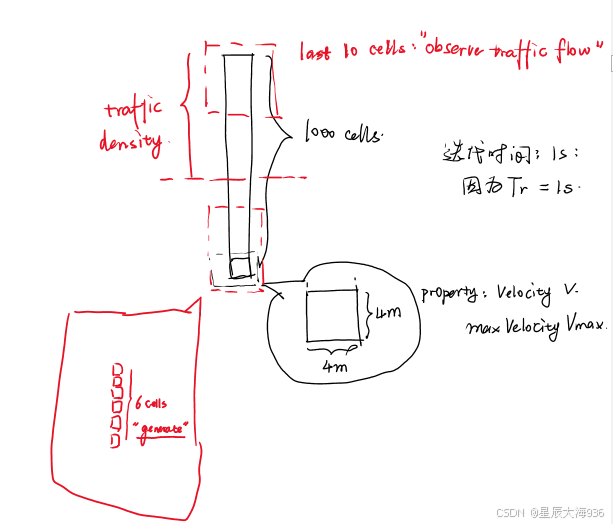
模型运行分析

- 产生车,按照随机过程产生车。


- 跟着车,可选的决策
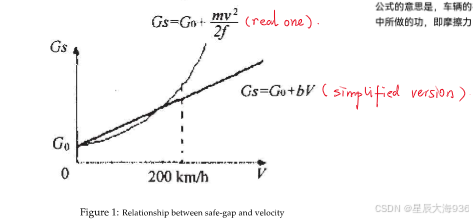
- 根据当前的车距G和此速度下的最小车距Gs
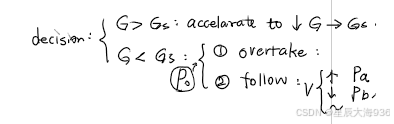
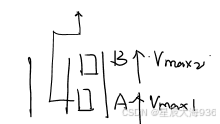
超车概率(高速条件下更可能会超车)
超车条件



一些要求的具体实现
| 题目要求 | 论文实现 |
|---|---|
| 分为light和heavy两种情况 | 区分inflow模型产出汽车的速度 |
| 性能指的是流量与安全 | 流量使用一定时间内穿过的车的数目;安全引入危险系数1,其中危险系数里面的Gs是V的函数2 |
| 速度限制 | 跟着其他车的时候可以选择加速(概率
p
a
p_a
pa)或者减速(概率
p
b
p_b
pb,概率与本车的速度有关系(理解为快车更想着超车))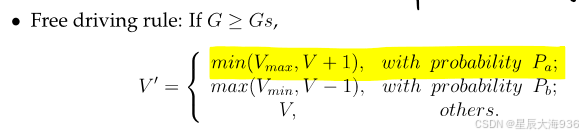 |
| 分析左侧驾驶 | mirror |
| 分析智能系统 | 修正如下:1. 左右超车的A相同 2.不再随机改变速度 3. 可以自由选择是否采用靠右行驶的规则,而且可以选择在什么情况下采用靠右行驶的规则 |