| 算法 | 用途 | 适用条件 | 时间复杂度 |
|---|---|---|---|
| Kruskal | 最小生成树 | 无向图(稀疏图) | O(E log E) |
| Prim | 最小生成树 | 无向图(稠密图) | O(V^2) 或 O(E log V) |
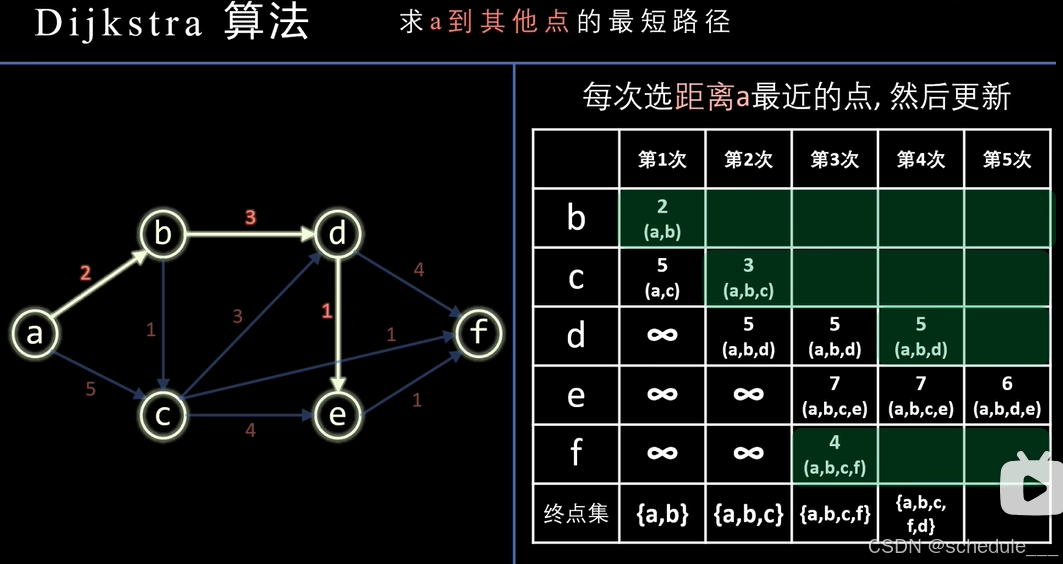
| Dijkstra | 单源最短路径 | 非负权图 | O(V^2) 或 O(E + V log V) |
| Floyd | 多源最短路径 | 允许负权边(无负权环) | O(V^3) |
| AOV | 拓扑排序 | 有向无环图(DAG) | O(V + E) |
| AOE | 关键路径 | 有向无环图(DAG) | O(V + E) |
算法
prim算法
key[MAXN]:存储从MST到每个顶点的最小权重(边)。
inMST[MAXN]:标记每个顶点是否已经在MST中。
优先队列:使用priority_queue(最小堆)来选择当前最小权重边对应的顶点。

-
初始化:
选择一个起始顶点,将其加入生成树。
初始化一个优先队列(最小堆),用于存储所有连接生成树和非生成树顶点的边,按权重排序。
初始化一个数组key,记录每个顶点到生成树的最小权重,起始顶点为0,其余顶点为无穷大(表示未连接)。
初始化一个数组inMST,用于标记每个节点是否已经加入MST中。 -
迭代过程
从优先队列中取出权重最小的边,将其对应的顶点u加入生成树。
遍历u的所有邻接顶点v:如果v未被加入生成树,且边(u, v)的权重小于key[v],则更新key[v]为(u, v)的权重,并将v加入优先队列。
typedef pair<int, int> pii; // 用于表示 (权重, 节点)
const int INF = INT_MAX;
void prim(int n, vector<vector<pii>>& adj) {
vector<int> key(n, INF); // 存储到每个节点的最小边权
vector<bool> inMST(n, false); // 标记节点是否在生成树中
priority_queue<pii, vector<pii>, greater<pii>> pq; // 最小堆,存储 (边权, 节点)
key[0] = 0; // 从节点 0 开始
pq.push({0, 0}); // 初始时将起点加入堆
while (!pq.empty()) {
int u = pq.top().second; // 当前节点
pq.pop();
if (inMST[u]) continue; // 如果已经在生成树中,跳过
inMST[u] = true; // 标记为在生成树中
// 遍历 u 的邻接节点
for (auto& edge : adj[u]) {
int v = edge.first;
int weight = edge.second;
// 如果节点 v 不在生成树中且通过 u 到 v 的边更短
if (!inMST[v] && weight < key[v]) {
key[v] = weight;
pq.push({key[v], v}); // 更新最小堆
}
}
}
}
Dijkstra算法
dis[MAXN]:存储从起点到每个节点的最短距离。
vis[MAXN]:标记每个节点是否已被访问。
优先队列:使用priority_queue(最小堆)来选择最短距离对应的顶点。
-
初始化:
选择一个起点。
初始化一个优先队列,用于存储到起点的距离。
初始化一个数组dis,用于存储从起点到每个节点的最短距离。起始顶点为0,其余顶点为无穷大(表示未连接)。
初始化一个数组vis,用于标记每个节点是否已经被访问过(即是否已经找到从起点到该节点的最短路径)。 -
迭代过程
从优先队列中取出离起点的最短距离对应的顶点u。
遍历u的所有邻接顶点v:如果v未被访问,且(u, v)的距离小于dis[v],则更新dis[v]为(u, v)的距离,并将v加入优先队列。
struct edge {
int v, w;
};
struct node {
int dis, u;
bool operator>(const node& a) const { return dis > a.dis; }
};
vector<edge> e[MAXN];
int dis[MAXN], vis[MAXN];
priority_queue<node, vector<node>, greater<node>> q;
void dijkstra(int n, int s) {
memset(dis, 0x3f, (n + 1) * sizeof(int));
memset(vis, 0, (n + 1) * sizeof(int));
dis[s] = 0;
q.push({0, s});
while (!q.empty()) {
int u = q.top().u;
q.pop();
if (vis[u]) continue;
vis[u] = 1;
// BFS
for (auto ed : e[u]) {
int v = ed.v, w = ed.w;
if (dis[v] > dis[u] + w) {
dis[v] = dis[u] + w;
q.push({dis[v], v});
}
}
}
}
用途
最小生成树(MST):
用途:最小生成树用于找到一个连通图中所有节点的最小连接总成本的树。它被广泛应用于网络设计、构建最优电路、电力网络、交通规划等领域。
实际应用:如设计最小成本的通讯网络、城市间的最短道路规划等。
最短路径:
用途:最短路径算法用于寻找图中两个节点之间的最短路径。它广泛应用于导航系统、网络路由、物流调度等。
实际应用:如计算地图上的最短路线、在网络中寻找数据传输的最优路径等。
拓扑排序:
用途:拓扑排序是有向无环图(DAG)的一种排序方式,确保每个节点都在它依赖的节点之前。它通常用于任务调度、编译器优化、项目计划等。
实际应用:如任务调度中的优先级排序、编译过程中的模块依赖关系等。
关键路径:
用途:关键路径方法(CPM)用于项目管理中,帮助确定哪些任务是“关键”的,即那些对项目完成时间有直接影响的任务。它能帮助管理者合理安排资源,避免延误。
实际应用:如建筑工程的项目管理、软件开发的进度控制等。