在参考https://code.google.com/p/imgwarp-opencv/的基础上,把mls图像变形算法进行了实现,但感觉效果不是很好。在此贴出源代码,希望有人其同探讨与对其改进。
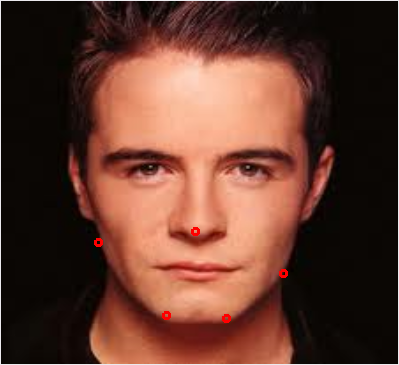
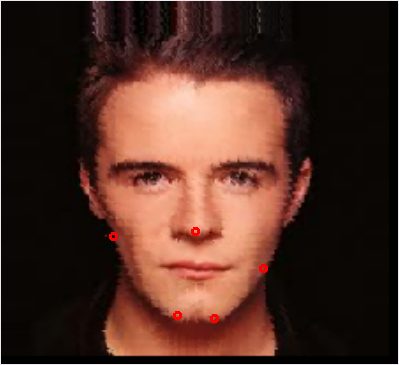
原图像 变形后图像
关于像素值的复原:mls只讲变形后新坐标的位置,未谈到像素值如何还原(因为一般为整数坐标到实数的坐标)。前向映射与逆向映射2种方法我都试过,效果一般,网格明显。有没有更好的像素值复原办法呢?
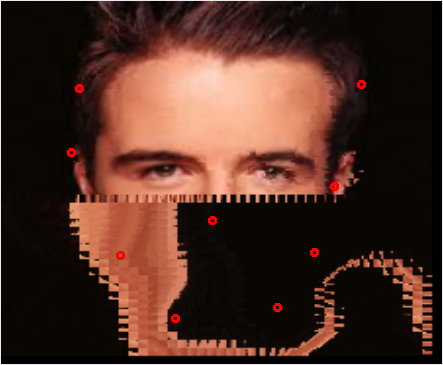
关于本代码:对于控制点8个以上变形就会出错(有一点在轮廓内),如此图。不知是什么原因。
/*****************************************************************************************头文件*******************************************************************/
#ifndef MLS_DEFORMATION_H
#define MLS_DEFORMATION_H
#include <vector>
#include <opencv2/core/core.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/highgui/highgui.hpp>
class MLSDeformation
{
public:
virtual boolInitMLSD(const cv::Mat& oriImg,const std::vector<cv::Point2i>&src_pt,int alpha=1, int gridsize=5);
virtualcv::Mat Deformation(const std::vector<cv::Point2i> &dst_pt)=0;
explicitMLSDeformation();
virtual ~MLSDeformation();
protected:
cv::MatgetDeformationImg();
voidmeanMat(cv::Mat& mat, int i, int j);//对mat(i,j)进行gridsize的中值(当mean为空时),不包括像素为空的坐标
voidrepairMat(cv::Mat& mat);//变形后的mat有些位置没有像素点,使用中值滤波填补
int gridsize_;
int alpha_;///weight_计算相关
intn_point_;///控制点数
cv::Matsrc_img_;//原图像
intsrc_width_;
intsrc_height_;
std::vector<cv::Point2d> pi_point_;//原控制点
std::vector<cv::Point2d> qi_point_;//变形后的控制点
///参数信息
double*weight_;//权重w*h*pt
double*sum_weight_;//w*h
cv::Point2d*deformation_pt_;//对应目标坐标
cv::Point2dpstart_, qstart_;
std::vector<cv::Point2d> pdiff_, qdiff_;
};
class MLSDAffine :public MLSDeformation
{
public:
virtual boolInitMLSD(const cv::Mat& oriImg,const std::vector<cv::Point2i>&src_pt,int alpha=1, int gridsize=5);
virtualcv::Mat Deformation(const std::vector<cv::Point2i> &dst_pt);
explicitMLSDAffine();
virtual~MLSDAffine();
private:
double*a_affine_;///affine A参数
};
class MLSDSimilarity :public MLSDeformation
{
public:
virtual boolInitMLSD(const cv::Mat& oriImg,const std::vector<cv::Point2i>&src_pt,int alpha=1, int gridsize=5);
virtualcv::Mat Deformation(const std::vector<cv::Point2i> &dst_pt);
explicitMLSDSimilarity();
virtual~MLSDSimilarity();
private:
double*us_;//us参数
cv::Matx22d*a_similarity_;///similarity A参数
};
class MLSDRigid :public MLSDeformation
{
public:
virtual boolInitMLSD(const cv::Mat& oriImg,const std::vector<cv::Point2i>&src_pt,int alpha=1, int gridsize=5);
virtualcv::Mat Deformation(const std::vector<cv::Point2i> &dst_pt);
explicitMLSDRigid();
virtual~MLSDRigid();
private:
double*ur_;//us参数
cv::Point2d*pstart_rigid_;//
cv::Matx22d*a_rigid_;///similarity A参数
};
#endif // MLS_DEFORMATION_H
/*****************************************************************************************源文件***************************************************************/
#include "MLSDeformation.h"
#include"../imageMLSwrap_gui/UseConsole.h"
#defineWeight(i,j,point) (weight_[(i)*src_height_+(j)*n_point_ + (point)])
#defineSumWeight(i,j) (sum_weight_[(i)*src_height_+(j)])
#defineDefPT(i,j) (deformation_pt_[(i)*src_height_+(j)])
#define US(i,j)(us_[(i)*src_height_+(j)])
#define UR(i,j)(ur_[(i)*src_height_+(j)])
#defineAffine(i,j,point) (a_affine_[(i)*src_height_+(j)*n_point_ + (point)])
#defineSimilarity(i,j,point) (a_similarity_[(i)*src_height_+(j)*n_point_ + (point)])
#defineRigid(i,j,point) (a_rigid_[(i)*src_height_+(j)*n_point_ + (point)])
#defineRigidPStart(i,j) (pstart_rigid_[(i)*src_height_+(j)])
inline doublebilinear_interp(double x, double y,
double v11,double v12, double v21, double v22) ///双线性插值
{
return (v11*(1-y) + v12*y) * (1-x) +(v21*(1-y) + v22*y) * x;
}
MLSDeformation::MLSDeformation()
:weight_(NULL),sum_weight_(NULL),deformation_pt_(NULL)
{
}
MLSDeformation::~MLSDeformation()
{
if(weight_) {
delete []weight_;
weight_=NULL;
}
if(sum_weight_) {
delete []sum_weight_;
sum_weight_=NULL;
}
if(deformation_pt_) {
delete []deformation_pt_;
deformation_pt_=NULL;
}
}
boolMLSDeformation::InitMLSD(const cv::Mat& oriImg, conststd::vector<cv::Point2i>& src_pt, int alpha, int gridsize)
{
n_point_ = src_pt.size();
if(n_point_<2) {
return false; ///点太少
}
src_img_=oriImg.clone();
src_width_=oriImg.cols;
src_height_=oriImg.rows;
alpha_=alpha;
gridsize_=gridsize;
if(weight_) {
delete []weight_;
}
weight_=new double[src_width_ * src_height_* n_point_];
if(sum_weight_) {
delete []sum_weight_;
}
sum_weight_=new double[src_width_ *src_height_];
if(deformation_pt_) {
delete []deformation_pt_;
}
deformation_pt_=new cv::Point2d[src_width_* src_height_];
pi_point_.resize(n_point_);
for (int i = 0; i<n_point_; ++i) {
pi_point_[i]=src_pt[i];
}
return true;
}
voidMLSDeformation::meanMat(cv::Mat& mat, int i, int j)
{
cv::Rect matrc(0,0,mat.cols,mat.rows);
cv::Rect rc(0,0,gridsize_,gridsize_);
rc+=cv::Point2i(i*0.5,j*0.5);
rc&=matrc;
cv::Mat mean_mat(mat,rc);
cv::Mat mask;
cv::cvtColor(mean_mat,mask,CV_BGR2GRAY);
cv::Scalar piex=cv::mean(mean_mat,mask);
mat.at<cv::Vec3b>(j,i)[0]=piex[0];
mat.at<cv::Vec3b>(j,i)[1]=piex[1];
mat.at<cv::Vec3b>(j,i)[2]=piex[2];
}
voidMLSDeformation::repairMat(cv::Mat& mat)
{
for(int i=0; i<src_width_; ++i) {
for(int j=0; j<src_height_; ++j) {
cv::Vec3bpiex=mat.at<cv::Vec3b>(j,i);
if(piex[0]==0 && piex[1]==0&& piex[2]==0) {
meanMat(mat,i,j);
}
}
}
}
cv::MatMLSDeformation::getDeformationImg()
{
cv::MatdstImg=cv::Mat::zeros(src_height_,src_width_,src_img_.type());
int nleft,ntop,nbottom,nright;//grid四个点的坐标信息
cv::Point2d lt,rt,lb,rb;//相对应于DefPT的坐标
cv::Vec3d piex;//像素值
for(int i=0; i<src_width_; i+=gridsize_){
for(int j=0; j<src_height_;j+=gridsize_) {
gridsize操作
nleft=i,ntop=j,nright=i+gridsize_,nbottom=j+gridsize_;
if(nright>src_width_-1) {
nright=src_width_-1;
}
if(nbottom>src_height_-1) {
nbottom=src_height_-1;
}
lt=DefPT(nleft,ntop);
lb=DefPT(nleft,nbottom);
rt=DefPT(nright,ntop);
rb=DefPT(nright,nbottom);
for(int di=nleft; di<nright;++di) {
for(int dj=ntop; dj<nbottom;++dj) {
doubledeltax=bilinear_interp(1.*(di-nleft)/(nright-nleft),1.*(dj-ntop)/(nbottom-ntop),lt.x,rt.x,lb.x,rb.x);
doubledeltay=bilinear_interp(1.*(di-nleft)/(nright-nleft),1.*(dj-ntop)/(nbottom-ntop),lt.y,rt.y,lb.y,rb.y);
cv::Point2i pt[2];
deltax=di-deltax;
deltay=dj-deltay;
pt[0].x=floor(deltax);
pt[0].y=floor(deltay);
pt[1].x=ceil(deltax);
pt[1].y=ceil(deltay);
for(int i=0; i<2; ++i) {
if(pt[i].x<0) {
pt[i].x=0;
} elseif(pt[i].x>src_width_-1) {
pt[i].x=src_width_-1;
}
if(pt[i].y<0) {
pt[i].y=0;
} elseif(pt[i].y>src_height_-1) {
pt[i].y=src_height_-1;
}
}
//
for (int ll=0; ll<3;ll++)
dstImg.at<cv::Vec3b>(dj, di)[ll]=bilinear_interp(pt[1].x-deltax,pt[1].y-deltay,
src_img_.at<cv::Vec3b>(pt[0].y, pt[0].x)[ll],
src_img_.at<cv::Vec3b>(pt[1].y, pt[0].x)[ll],
src_img_.at<cv::Vec3b>(pt[0].y, pt[1].x)[ll],
src_img_.at<cv::Vec3b>(pt[1].y, pt[1].x)[ll]);
//
// for(int i=0; i<2; ++i) {
// for(int j=0; j<2;++j) {
// piex=dstImg.at<cv::Vec3b>(pt[i].y,pt[j].x);
// if(piex[0]==0&& piex[1]==0 && piex[2]==0) {
// dstImg.at<cv::Vec3b>(pt[i].y,pt[j].x)=src_img_.at<cv::Vec3b>(dj,di);
// } else {
// piex+=src_img_.at<cv::Vec3b>(dj,di);
// dstImg.at<cv::Vec3b>(pt[i].y,pt[j].x)=piex*0.5;
// }
// }
// }
}
}
}
}
return dstImg;
}
//MLSDAffineclass/
/
MLSDAffine::MLSDAffine()
:a_affine_(NULL)
{
}
MLSDAffine::~MLSDAffine()
{
if(a_affine_) {
delete []a_affine_;
a_affine_=NULL;
}
}
boolMLSDAffine::InitMLSD(const cv::Mat& oriImg, conststd::vector<cv::Point2i>& src_pt, int alpha, int gridsize)
{
if(!MLSDeformation::InitMLSD(oriImg,src_pt,alpha,gridsize)) {
return false;
}
if(a_affine_) {
delete []a_affine_;
}
a_affine_=new double[src_width_ *src_height_ * n_point_];
pdiff_.resize(n_point_);
cv::Point2d tmp_pt2d;
for(int i=0; i<src_width_; i+=gridsize_){
for(int j=0; j<src_height_;j+=gridsize_) {
///由pi计算pstart,pdiff
cv::Point2d piex_pt(i,j);
SumWeight(i,j)=0.;
pstart_=cv::Point2d(0.,0.);
for(int index=0; index<n_point_;++index) {
if(src_pt[index].x ==i&& src_pt[index].y == j) {
Weight(i,j,index)=0.;
continue;
}
tmp_pt2d=pi_point_[index]-piex_pt;
if(alpha_ ==1) {
Weight(i,j,index)=1/tmp_pt2d.ddot(tmp_pt2d);
} else {
Weight(i,j,index)=pow(tmp_pt2d.ddot(tmp_pt2d),-alpha_);
}
SumWeight(i,j)+=Weight(i,j,index);
pstart_+=Weight(i,j,index)*pi_point_[index];
}
pstart_*=(1/SumWeight(i,j));
for(int index=0; index<n_point_;++index) {
pdiff_[index]=pi_point_[index]-pstart_;
}
///aj=(piex-pstart)*sum(pdifftwipdiff).inv()*wj*pjt
cv::Matsummat=cv::Mat::zeros(2,2,CV_64F);
for(int index=0; index<n_point_;++index) {//
cv::MatpointMat(pdiff_[index]);
summat+=Weight(i,j,index)*pointMat*pointMat.t();
}
summat=summat.inv();
tmp_pt2d=piex_pt-pstart_;//v-p*
for(int index=0; index<n_point_;++index) {//sum()
cv::Mat pointMat(tmp_pt2d);
pointMat=pointMat.t() * summat;
pointMat=Weight(i,j,index)*pointMat*cv::Mat(pdiff_[index]);
Affine(i,j,index)=pointMat.at<double>(0,0);//只有一个元素
}
}
}
return true;
}
cv::MatMLSDAffine::Deformation(const std::vector<cv::Point2i>& dst_pt)
{
if(n_point_ != dst_pt.size()) {
return cv::Mat();
}
qi_point_.resize(n_point_);
qdiff_.resize(n_point_);
for (int i = 0; i<n_point_; ++i) {
qi_point_[i]=dst_pt[i];
}
for(int i=0;; i+=gridsize_) {
if (i>=src_width_ &&i<src_width_+gridsize_ - 1) { //计算最后一行一列
i=src_width_-1;
} else if (i>=src_width_) {
break;
}
for (int j = 0; ; j+=gridsize_) {
if (j>=src_height_ &&j<src_height_+gridsize_ - 1) { //计算最后一行一列
j = src_height_ - 1;
} else if (j>=src_height_) {
break;
}
///由qi计算qstart,qdiff
bool isequalpi=false;
cv::Point2d piex_pt(i,j);
qstart_=cv::Point2d(0.,0.);
for(int index=0; index<n_point_;++index) {
if(pi_point_[index].x == i&& pi_point_[index].y ==j ) {
isequalpi=true;
break;
}
qstart_+=Weight(i,j,index)*qi_point_[index];
}
if(isequalpi) {
DefPT(i,j)=cv::Point2d(0,0);
} else {
qstart_*=(1/SumWeight(i,j));
for(int index=0;index<n_point_; ++index) {
qdiff_[index]=qi_point_[index]-qstart_;
}
///fj=sum(aj*qdiffj)+qstart
cv::Matsummat=cv::Mat::zeros(2,1,CV_64F);
for(int index=0;index<n_point_; ++index) {
cv::Mat pointMat(qdiff_[index]);
summat+=Affine(i,j,index)*pointMat;
}
summat+=cv::Mat(qstart_);
DefPT(i,j).x=summat.at<double>(0,0)-i;
DefPT(i,j).y=summat.at<double>(1,0)-j;
}
}
}
return getDeformationImg();
}
//MLSDSimilarityclass/
///
MLSDSimilarity::MLSDSimilarity()
: a_similarity_(NULL),us_(NULL)
{
}
MLSDSimilarity::~MLSDSimilarity()
{
if(a_similarity_) {
delete []a_similarity_;
a_similarity_=NULL;
}
if(us_) {
delete []us_;
us_=NULL;
}
}
boolMLSDSimilarity::InitMLSD(const cv::Mat& oriImg, conststd::vector<cv::Point2i>& src_pt, int alpha, int gridsize)
{
if(!MLSDeformation::InitMLSD(oriImg,src_pt,alpha,gridsize)) {
return false;
}
if(a_similarity_) {
delete []a_similarity_;
}
a_similarity_=new cv::Matx22d[src_width_ *src_height_ * n_point_];
if(us_) {
delete []us_;
}
us_=new double[src_width_ * src_height_];
pdiff_.resize(n_point_);
cv::Point2d tmp_pt2d;
for(int i=0; i<src_width_; i+=gridsize_){
for(int j=0; j<src_height_;j+=gridsize_) {
///由pi计算pstart,pdiff
cv::Point2d piex_pt(i,j);
SumWeight(i,j)=0.;
pstart_=cv::Point2d(0.,0.);
for(int index=0; index<n_point_;++index) {
if(src_pt[index].x ==i&& src_pt[index].y == j) {
Weight(i,j,index)=0.;
continue;
}
tmp_pt2d=pi_point_[index]-piex_pt;
if(alpha_ ==1) {
Weight(i,j,index)=1/tmp_pt2d.ddot(tmp_pt2d);
} else {
Weight(i,j,index)=pow(tmp_pt2d.ddot(tmp_pt2d),-alpha_);
}
SumWeight(i,j)+=Weight(i,j,index);
pstart_+=Weight(i,j,index)*pi_point_[index];
}
pstart_*=(1/SumWeight(i,j));
US(i,j)=0.;
for(int index=0; index<n_point_;++index) {
pdiff_[index]=pi_point_[index]-pstart_;
US(i,j)+=Weight(i,j,index)*pdiff_[index].ddot(pdiff_[index]);
}
///ai=wi * (pi-pi`)T(v-pstart -(v-pstart)`)
cv::Matx22dleftmat=cv::Matx22d::zeros();
cv::Matx22d rightmat=cv::Matx22d::zeros();
cv::Point2dpdiff_plus,vpstart,vpstart_plus;
for(int index=0; index<n_point_;++index) {
pdiff_plus.x=-pdiff_[index].y;
pdiff_plus.y=pdiff_[index].x;
vpstart=piex_pt-pstart_;
vpstart_plus.x=vpstart.y;
vpstart_plus.y=-vpstart.x;
leftmat(0,0)=pdiff_[index].x;
leftmat(1,0)=pdiff_[index].y;
leftmat(0,1)=pdiff_plus.x;
leftmat(1,1)=pdiff_plus.y;
rightmat(0,0)=vpstart.x;
rightmat(1,0)=vpstart.y;
rightmat(0,1)=vpstart_plus.x;
rightmat(1,1)=vpstart_plus.y;
Similarity(i,j,index)=Weight(i,j,index)*leftmat*rightmat.t();
}
}
}
return true;
}
cv::MatMLSDSimilarity::Deformation(const std::vector<cv::Point2i>& dst_pt)
{
if(n_point_ != dst_pt.size()) {
return cv::Mat();
}
qi_point_.resize(n_point_);
qdiff_.resize(n_point_);
for (int i = 0; i<n_point_; ++i) {
qi_point_[i]=dst_pt[i];
}
for(int i=0;; i+=gridsize_) {
if (i>=src_width_ &&i<src_width_+gridsize_ - 1) { //计算最后一行一列
i=src_width_-1;
} else if (i>=src_width_) {
break;
}
for (int j = 0; ; j+=gridsize_) {
if (j>=src_height_ &&j<src_height_+gridsize_ - 1) { //计算最后一行一列
j = src_height_ - 1;
} else if (j>=src_height_) {
break;
}
///由qi计算qstart,qdiff
bool isequalpi=false;
cv::Point2d piex_pt(i,j);
qstart_=cv::Point2d(0.,0.);
for(int index=0; index<n_point_;++index) {
if(pi_point_[index].x == i&& pi_point_[index].y ==j ) {
isequalpi=true;
break;
}
qstart_+=Weight(i,j,index)*qi_point_[index];
}
if(isequalpi) {
DefPT(i,j)=cv::Point2d(0,0);
} else {
qstart_*=(1/SumWeight(i,j));
for(int index=0;index<n_point_; ++index) {
qdiff_[index]=qi_point_[index]-qstart_;
}
///fj=sum(qi*Ai/us)+qstart
cv::Matsummat=cv::Mat::zeros(1,2,CV_64F);
for(int index=0;index<n_point_; ++index) {
cv::MatpointMat(qdiff_[index]);
summat+=pointMat.t()*cv::Mat(Similarity(i,j,index))*(1./US(i,j));
}
summat+=cv::Mat(qstart_).t();
DefPT(i,j).x=summat.at<double>(0,0)-i;
DefPT(i,j).y=summat.at<double>(0,1)-j;
}
}
}
return getDeformationImg();
}
//MLSDRigidclass/
///
MLSDRigid::MLSDRigid()
:a_rigid_(NULL),ur_(NULL)
,pstart_rigid_(NULL)
{
}
MLSDRigid::~MLSDRigid()
{
if(a_rigid_) {
delete []a_rigid_;
a_rigid_=NULL;
}
if(ur_) {
delete []ur_;
ur_=NULL;
}
if(pstart_rigid_) {
delete []pstart_rigid_;
pstart_rigid_=NULL;
}
}
boolMLSDRigid::InitMLSD(const cv::Mat& oriImg, const std::vector<cv::Point2i>&src_pt, int alpha, int gridsize)
{
if(!MLSDeformation::InitMLSD(oriImg,src_pt,alpha,gridsize)) {
return false;
}
if(a_rigid_) {
delete []a_rigid_;
}
a_rigid_=new cv::Matx22d[src_width_ * src_height_* n_point_];
if(ur_) {
delete []ur_;
}
ur_=new double[src_width_ * src_height_];
if(pstart_rigid_) {
delete []pstart_rigid_;
}
pstart_rigid_=new cv::Point2d[src_width_ *src_height_];
pdiff_.resize(n_point_);
cv::Point2d tmp_pt2d;
for(int i=0; i<src_width_; i+=gridsize_){
for(int j=0; j<src_height_;j+=gridsize_) {
///由pi计算pstart,pdiff
cv::Point2d piex_pt(i,j);
SumWeight(i,j)=0.;
RigidPStart(i,j)=cv::Point2d(0.,0.);
for(int index=0; index<n_point_;++index) {
if(src_pt[index].x ==i&& src_pt[index].y == j) {
Weight(i,j,index)=0.;
continue;
}
tmp_pt2d=pi_point_[index]-piex_pt;
if(alpha_ ==1) {
Weight(i,j,index)=1/tmp_pt2d.ddot(tmp_pt2d);
} else {
Weight(i,j,index)=pow(tmp_pt2d.ddot(tmp_pt2d),-alpha_);
}
SumWeight(i,j)+=Weight(i,j,index);
pstart_+=Weight(i,j,index)*pi_point_[index];
RigidPStart(i,j)+=Weight(i,j,index)*pi_point_[index];
}
RigidPStart(i,j)*=(1/SumWeight(i,j));
for(int index=0; index<n_point_;++index) {
pdiff_[index]=pi_point_[index]-RigidPStart(i,j);
}
///ai=wi * (pi-pi`)T(v-pstart -(v-pstart)`)
cv::Matx22dleftmat=cv::Matx22d::zeros();
cv::Matx22drightmat=cv::Matx22d::zeros();
cv::Point2dpdiff_plus,vpstart,vpstart_plus;
for(int index=0; index<n_point_;++index) {
pdiff_plus.x=-pdiff_[index].y;
pdiff_plus.y=pdiff_[index].x;
vpstart=piex_pt-RigidPStart(i,j);
vpstart_plus.x=vpstart.y;
vpstart_plus.y=-vpstart.x;
leftmat(0,0)=pdiff_[index].x;
leftmat(1,0)=pdiff_[index].y;
leftmat(0,1)=pdiff_plus.x;
leftmat(1,1)=pdiff_plus.y;
rightmat(0,0)=vpstart.x;
rightmat(1,0)=vpstart.y;
rightmat(0,1)=vpstart_plus.x;
rightmat(1,1)=vpstart_plus.y;
Rigid(i,j,index)=Weight(i,j,index)*leftmat*rightmat.t();
}
}
}
return true;
}
cv::MatMLSDRigid::Deformation(const std::vector<cv::Point2i>& dst_pt)
{
if(n_point_ != dst_pt.size()) {
return cv::Mat();
}
qi_point_.resize(n_point_);
qdiff_.resize(n_point_);
for (int i = 0; i<n_point_; ++i) {
qi_point_[i]=dst_pt[i];
}
for(int i=0;; i+=gridsize_) {
if (i>=src_width_ &&i<src_width_+gridsize_ - 1) { //计算最后一行一列
i=src_width_-1;
} else if (i>=src_width_) {
break;
}
for (int j = 0; ; j+=gridsize_) {
if (j>=src_height_ &&j<src_height_+gridsize_ - 1) { //计算最后一行一列
j = src_height_ - 1;
} else if (j>=src_height_) {
break;
}
///由qi计算qstart,qdiff
bool isequalpi=false;
cv::Point2d piex_pt(i,j);
qstart_=cv::Point2d(0.,0.);
for(int index=0; index<n_point_;++index) {
if(pi_point_[index].x == i&& pi_point_[index].y ==j ) {
isequalpi=true;
break;
}
qstart_+=Weight(i,j,index)*qi_point_[index];
}
if(isequalpi) {
DefPT(i,j)=cv::Point2d(0,0);
} else {
qstart_*=(1/SumWeight(i,j));
for(int index=0;index<n_point_; ++index) {
qdiff_[index]=qi_point_[index]-qstart_;
}
///fj=|v-pstart|*sum(qi*ai)/|sum(qi*ai|+qstart
cv::Matsummat=cv::Mat::zeros(1,2,CV_64F);
cv::MatpointMat(cv::Point2d(i,j)-RigidPStart(i,j));
for(int index=0;index<n_point_; ++index) {
summat+=cv::Mat(qdiff_[index]).t()*cv::Mat(Rigid(i,j,index));
}
summat*=cv::norm(pointMat)/cv::norm(cv::Mat(summat));
summat+=cv::Mat(qstart_).t();
DefPT(i,j).x=summat.at<double>(0,0)-i;
DefPT(i,j).y=summat.at<double>(0,1)-j;
}
}
}
return getDeformationImg();
}