空间划分技术在CAD建模中被广泛应用,用于提高建模计算的效率。经过不断研究,衍生出了各种各样的空间划分技术,从对空间简单等分的空间格,到有固定划分结构的八叉树、KD树,再到根据实际场景自适应划分的BVH(Boundary Volume Hierarchy)、R-Tree,总能找到一种适合应用场景的类型。
作为一种辅助性的空间数据结构,空间划分技术介于操作算法和几何对象之间,它通过筛选作用,排除大量与特定空间操作无关的几何对象,从而大大提高空间操作的效率。本文以八叉树为例,讲解空间划分的基本原理和应用。
1.基本原理
八叉树相关的操作有2个:构造和查询。
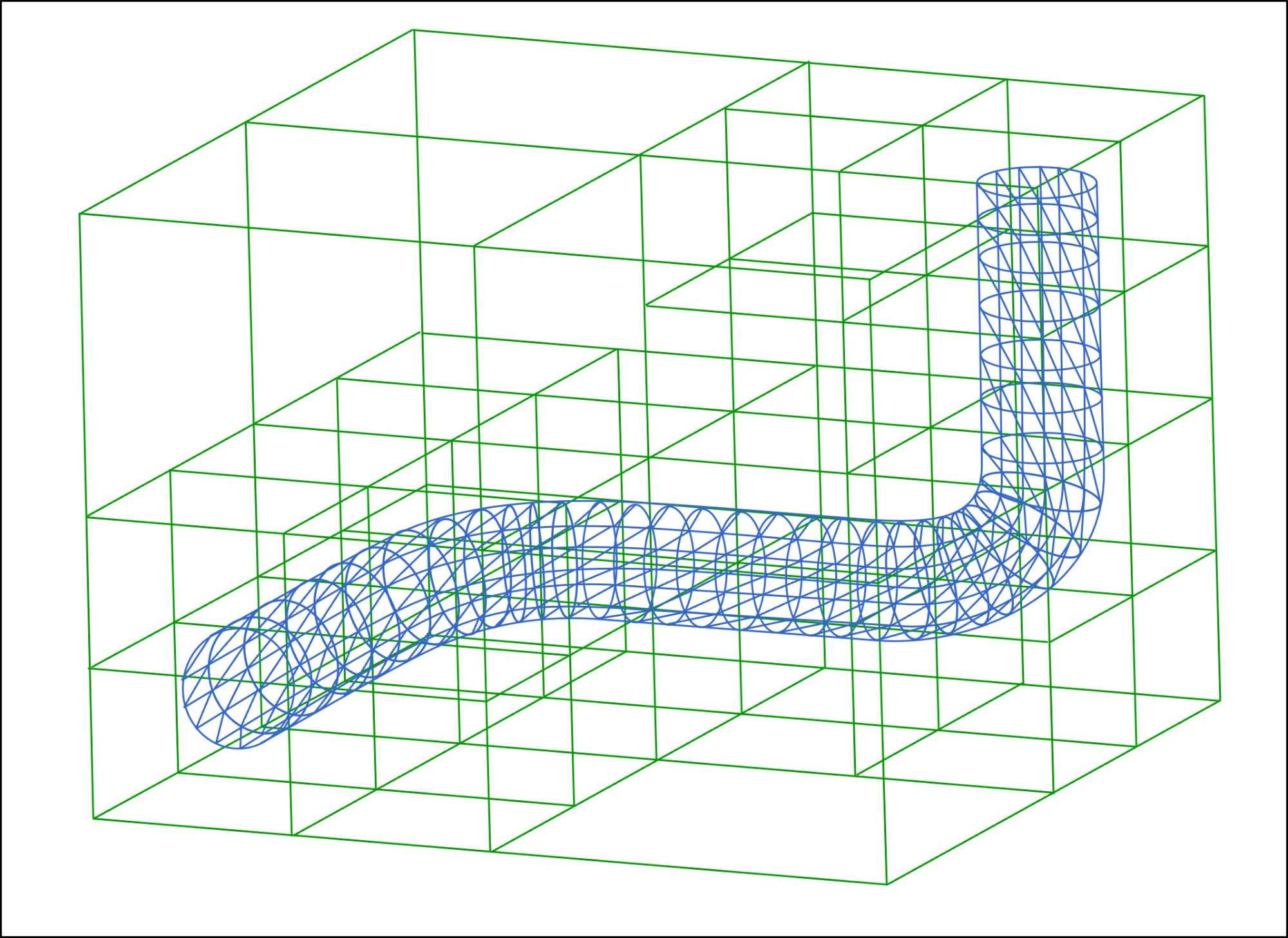
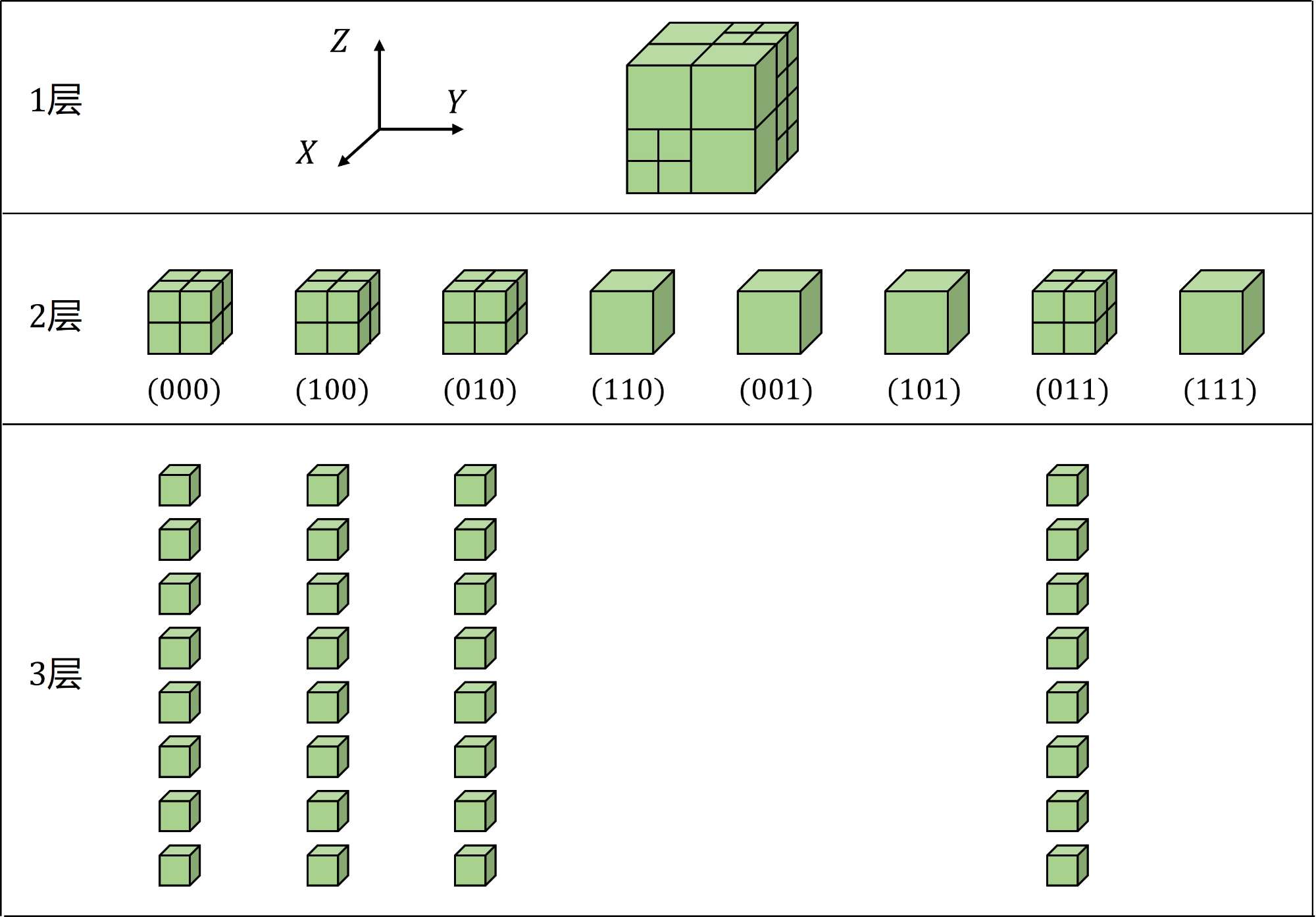
构造。如图1所示,蓝色为由一系列三角形组成的弯管状网格,绿色为网格创建的八叉树。如图2所示,上述八叉树有三层结构,第一层仅有1个根节点,第二层是根节点分裂而来的8个子节点,第三层的子节点更多,是由第二层的节点分裂而来的。需要注意的是,不是每个第二层的节点都会再次分裂。为了方便讲述,我们将第二层的子节点按坐标轴进行编号,即
(
X
,
Y
,
Z
)
(X, Y, Z)
(X,Y,Z),数字0代表在坐标轴的离原点近的地方,数字1反之,比如
(
1
,
0
,
0
)
(1, 0, 0)
(1,0,0)在前面左下角的位置。第二层的4个节点,被分裂成了更小的8个子节点,分别是
(
0
,
0
,
0
)
(0, 0, 0)
(0,0,0)、
(
1
,
0
,
0
)
(1, 0, 0)
(1,0,0)、
(
0
,
1
,
0
)
(0, 1, 0)
(0,1,0)、
(
0
,
1
,
1
)
(0, 1, 1)
(0,1,1),而其它节点没有再被细分,这是因为在这几个节点对应的空间中没有几何对象,如果被细分了,反而会增加存储空间和查询时间。在八叉树中,虽然有些节点不会被细分,但一旦被细分,一定会是分裂为8个子节点。
简单讲解一下上述八叉树可能的构造过程:(1)确定包围几何对象的包容盒,包括每个三角形的包围盒和整个网格的包围盒;(2)创建八叉树的根节点,其对应的空间就是整个网格的包围盒,这也是后续操作的最大空间;(3)依次将三角形放入八叉树中。对于某一三角形,从根节点开始,依次用其包围盒与子节点判断是否相交,如果相交,则为相关节点,继续与相关节点的子节点判断是否相交,如此不断深度遍历,直到树的最大层数的节点,将此三角形存储在这个叶子节点中。在此过程中,相关节点(即存在三角形的包容盒与之相交)被分裂,即子节点被创建出来。
查询。查询的过程与构造相似,假设我们要考虑的问题是平面与图1中的网格求交。首先,利用平面与八叉树中的节点包围盒判断相交,深度遍历获取所有的相关叶子节点,然后,将叶子节点中的三角形取出,查询结束。后面就是对平面和被筛选出的三角形进行真正的求交操作了。
使用八叉树之前,需要考虑这几件事情:
- 构建八叉树的终止条件是什么?固定层数?最大层数?叶子节点中的几何对象数?这会影响构建效率和查询效率。
- 何时创建八叉树的节点?是在开始时一并创建,还是构建过程中按需创建?这涉及到内存分配方式,可能极大的影响构建时间。
- 几何对象存储方式,是只存储在叶子节点上,还是也存在中间节点上?这会影响查询时的筛选效果。
2. 应用实例
考虑这样一个经典问题:如图3所示,沿某一确定方向,计算一系列点在网格上的投影点。最简单直接的方法是:对于每个点,沿设定方向作直线,然后与每个三角形求交。简单直接法实现起来非常简单,但是,当点非常多时,效率非常差,因为直接法的时间复杂度是
O
(
n
∗
m
)
O(n*m)
O(n∗m),其中,
n
n
n是待投影点的个数,
m
m
m是网格包含三角形的个数。

由于该问题是固定方向的,可以进行降维,将大部分计算限定在XY平面进行。如果固定方向不是Z轴,则以固定方向为Z轴构建局部坐标系,并进行坐标转换即可。这样,简单直接法中判断直线与三角形是否相交,就可以转换为判断点是否在三角形内,这可以大大减少计算量。
基于上面的降维处理,如果点数较多,简单直接法还可以被优化:首先,计算每个三角形的的XY包容盒,并存储起来;然后,直线与三角形求交之前,先判断点是否在相应的XY包容盒内,如果不在里面,则直线肯定不与三角形相交,从而筛选掉大量不相关的三角形,但优化直接法的时间复杂度依然是 O ( n ∗ m ) O(n*m) O(n∗m)。
对于空间划分方法,则可以采用四叉树,而不是八叉树,即只在XY平面上划分空间。应用四叉树的一般流程是:(1) 构造四叉树;(2) 利用树结构查询相关几何对象(这里是筛选出可能相交的三角形);(3) 真正的计算操作(这里是计算直线与三角形的交点)。
现在对比3种方法的实际效果,给定待投影点的个数为1,000,网格包含的三角形个数约为100,000,四叉树的层数选择为5。3种方法的投影用时见表1。四叉树方法比优化直接法快了10多倍,更是比简单直接法快了80多倍!

那么,采用四叉树方法一定比直接法快吗?答案是否定的,因为四叉树方法存在构建四叉树的固定开销。这与问题规模有关,而点投影问题的规模是待投影点的个数和网格包含的三角形数目,一般两者越大,加速比越好。上述两个参数有一定相似性,本文只探讨待投影点的个数对性能表现的影响。表2是在不同点数情况下3种方法的统计结果。从表中可以看出,简单直接法的用时基本与点数呈线性相关,而另外2种方法则没有这样的关系,这是因为,在三角形个数一定的情况下,两者均存在固定开销。优化直接法的固定开销大概是4,600 us,四叉树方法的大概是10,200 us。因此,优化直接法在点数为1时效率比简单直接法差,而四叉树方法在点数为10时就不行了。相反,当点数增加到10,000时,直接法与四叉树方法的差距进一步增大。

现在探讨对四叉树应用效果影响比较大的参数:层数。直观感受是:四叉树层数太少,四叉树的筛选作用较小;层数太多,构建四叉树的时间和占用的空间可能很大,极端情况下,层数加1,节点个数翻4倍。表3是在不同层数下四叉树方法的表现。当层数为1时,效率基本与优化直接法相当,随着层数增加,效率逐渐提升,但当层数太多时,则得不偿失了。对于现在讨论的问题,最优的层数应该是4-6层。但是,影响最优层数的因素很多,比如:网格包含的三角形个数及其在空间中的分布、计算交点的复杂程度等。在这里,提供一个指标用于估计层数
k
k
k,也就是叶子节点的平均几何对象数
t
t
t,即:
t
=
m
4
k
−
1
.
t=\frac{m}{4^{k-1}}.
t=4k−1m.
其中,
m
m
m是网格包含三角形的个数。请注意,最优层数需要根据实际应用确定,一般会认为在
t
=
10
t=10
t=10 附近比较合适。

之所以要介绍空间划分技术,因为它们是CAD建模中必须要用的技术。后面对不同方法的分析,则希望引导读者进一步思考,并在实际应用中感受不同方法、不同参数的不同效果,毕竟“纸上得来终觉浅,绝知此事要躬行”。
文章首发于微信公众号:CAD智造干将,欢迎关注
