版本:VS2019、Kinect3.0、相机传感器SDK1.4.0、OpenCV3.4.1、PCL1.10.1
参考文章:
基于Azure Kinect SDK获取物体rgb图、深度图、红外IR图和点云数据并保存到本地
RGB-D相机(Azure Kinect DK)RGB图、深度图的获取,配准与保存
项目配置
OpenCV和PCL安装
VS2019配置PCL(windows)
VS2019配置OpenCV(windows)
相机安装
1、将相机连接电脑
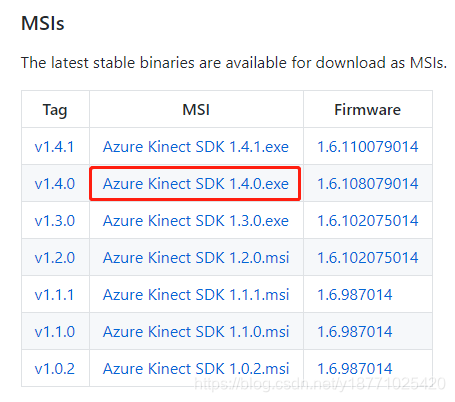
2、下载并安装传感器SDK
下载地址:https://github.com/microsoft/Azure-Kinect-Sensor-SDK/blob/develop/docs/usage.md
下载完成后点击安装即可
配置到VS项目中
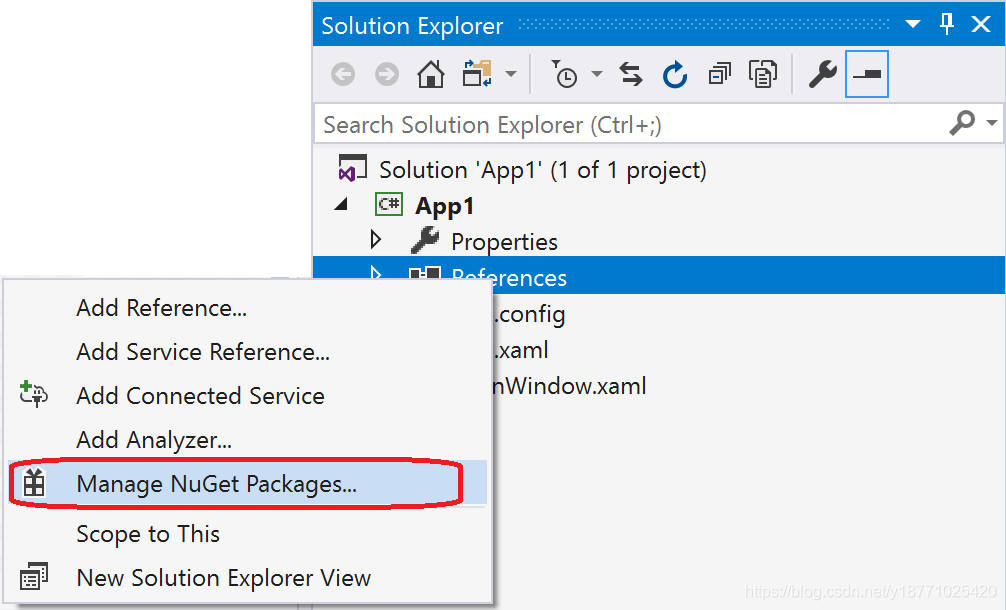
1、选择项目中的引用,右键选择管理NuGet包
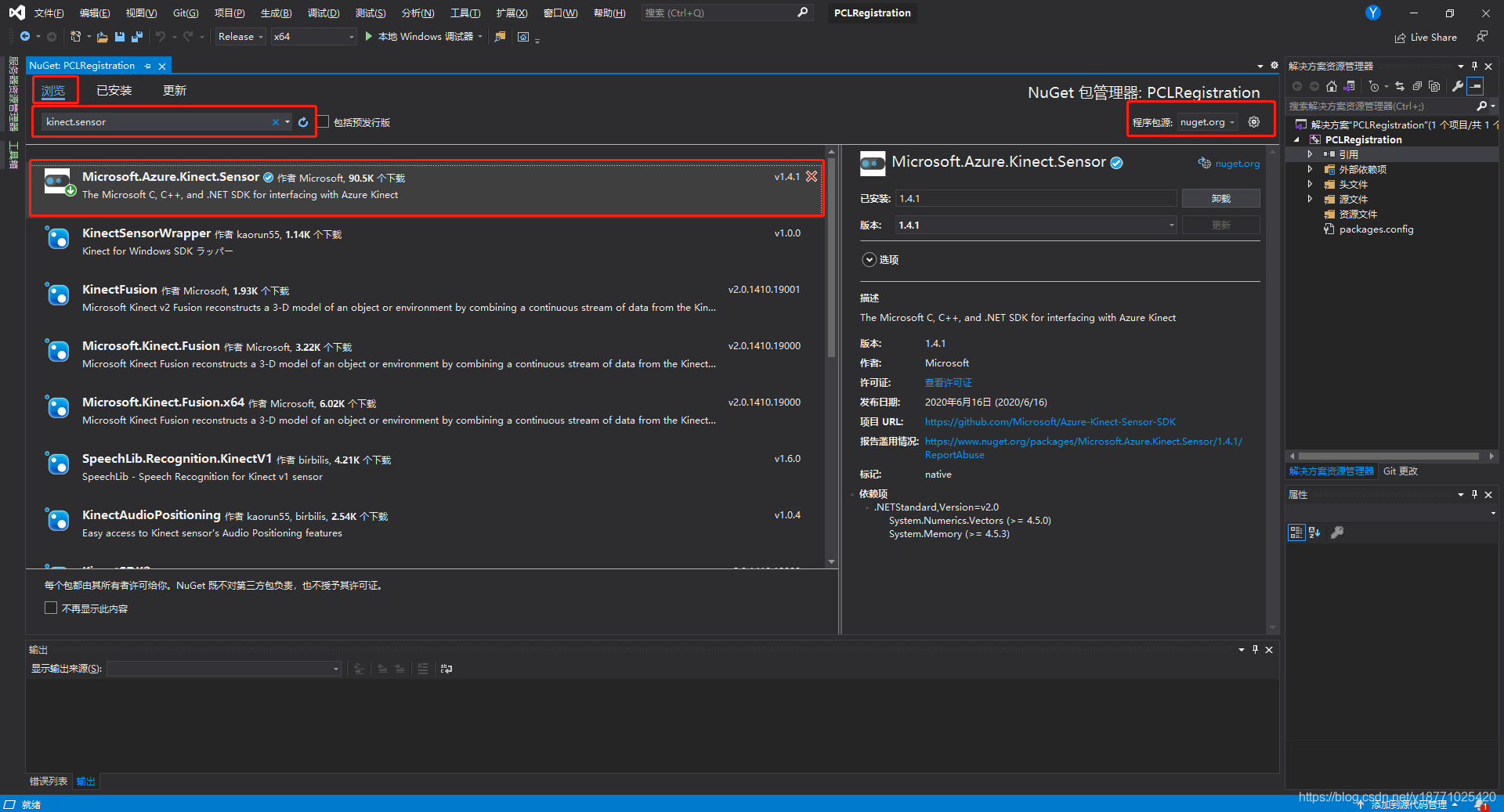
2、在浏览中,选择下图所示包,点击下载安装即可
3、在项目中添加头文件

#include <k4a/k4a.h>
#include <k4arecord/record.h>
#include <k4arecord/playback.h>
获取RGB、Depth、IR图并保存
需要在脚本目录下创建rgb、depth、ir三个文件夹才可以保存图片
代码
// C++
#include <iostream>
#include <chrono>
#include <string>
// OpenCV
#include <opencv2/opencv.hpp>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
// Kinect DK
#include <k4a/k4a.hpp>
using namespace cv;
using namespace std;
// 宏
// 方便控制是否 std::cout 信息
#define DEBUG_std_cout 0
int main(int argc, char* argv[]) {
/*
找到并打开 Azure Kinect 设备
*/
// 发现已连接的设备数
const uint32_t device_count = k4a::device::get_installed_count();
if (0 == device_count) {
std::cout << "Error: no K4A devices found. " << std::endl;
return -1;
}
else {
std::cout << "Found " << device_count << " connected devices. " << std::endl;
if (1 != device_count)// 超过1个设备,也输出错误信息。
{
std::cout << "Error: more than one K4A devices found. " << std::endl;
return -1;
}
else// 该示例代码仅限对1个设备操作
{
std::cout << "Done: found 1 K4A device. " << std::endl;
}
}
// 打开(默认)设备
k4a::device device = k4a::device::open(K4A_DEVICE_DEFAULT);
std::cout << "Done: open device. " << std::endl;
/*
检索并保存 Azure Kinect 图像数据
*/
// 配置并启动设备
k4a_device_configuration_t config = K4A_DEVICE_CONFIG_INIT_DISABLE_ALL;
config.camera_fps = K4A_FRAMES_PER_SECOND_30;
config.color_format = K4A_IMAGE_FORMAT_COLOR_BGRA32;
config.color_resolution = K4A_COLOR_RESOLUTION_1080P;
config.depth_mode = K4A_DEPTH_MODE_NFOV_UNBINNED;
//config.depth_mode = K4A_DEPTH_MODE_WFOV_2X2BINNED;
config.synchronized_images_only = true;// ensures that depth and color images are both available in the capture
device.start_cameras(&config);
std::cout << "Done: start camera." << std::endl;
//写入txt文件流
ofstream rgb_out;
ofstream d_out;
ofstream ir_out;
rgb_out.open("./rgb.txt");
d_out.open("./depth.txt");
ir_out.open("./ir.txt");
rgb_out << "# color images" << endl;
rgb_out << "# file: rgbd_dataset" << endl;
rgb_out << "# timestamp" << " " << "filename" << endl;
d_out << "# depth images" << endl;
d_out << "# file: rgbd_dataset" << endl;
d_out << "# timestamp" << " " << "filename" << endl;
ir_out << "# ir images" << endl;
ir_out << "# file: rgbd_dataset" << endl;
ir_out << "# timestamp" << " " << "filename" << endl;
rgb_out << flush;
d_out << flush;
// 稳定化
k4a::capture capture;
int iAuto = 0;//用来稳定,类似自动曝光
int iAutoError = 0;// 统计自动曝光的失败次数
while (true) {
if (device.get_capture(&capture)) {
std::cout << iAuto << ". Capture several frames to give auto-exposure" << std::endl;
// 跳过前 n 个(成功的数据采集)循环,用来稳定
if (iAuto != 30) {
iAuto++;
continue;
}
else {
std::cout << "Done: auto-exposure" << std::endl;
break;// 跳出该循环,完成相机的稳定过程
}
}
else {
std::cout << iAutoError << ". K4A_WAIT_RESULT_TIMEOUT." << std::endl;
if (iAutoError != 30) {
iAutoError++;
continue;
}
else {
std::cout << "Error: failed to give auto-exposure. " << std::endl;
return -1;
}
}
}
std::cout << "-----------------------------------" << std::endl;
std::cout << "----- Have Started Kinect DK. -----" << std::endl;
std::cout << "-----------------------------------" << std::endl;
// 从设备获取捕获
k4a::image rgbImage;
k4a::image depthImage;
k4a::image irImage;
k4a::image transformed_depthImage;
cv::Mat cv_rgbImage_with_alpha;
cv::Mat cv_rgbImage_no_alpha;
cv::Mat cv_depth;
cv::Mat cv_depth_8U;
cv::Mat cv_irImage;
cv::Mat cv_irImage_8U;
while (true)
// for (size_t i = 0; i < 100; i++)
{
// if (device.get_capture(&capture, std::chrono::milliseconds(0)))
if (device.get_capture(&capture)) {
// rgb
// * Each pixel of BGRA32 data is four bytes. The first three bytes represent Blue, Green,
// * and Red data. The fourth byte is the alpha channel and is unused in the Azure Kinect APIs.
rgbImage = capture.get_color_image();
#if DEBUG_std_cout == 1
std::cout << "[rgb] " << "\n"
<< "format: " << rgbImage.get_format() << "\n"
<< "device_timestamp: " << rgbImage.get_device_timestamp().count() << "\n"
<< "system_timestamp: " << rgbImage.get_system_timestamp().count() << "\n"
<< "height*width: " << rgbImage.get_height_pixels() << ", " << rgbImage.get_width_pixels()
<< std::endl;
#endif
// depth
// * Each pixel of DEPTH16 data is two bytes of little endian unsigned depth data. The unit of the data is in
// * millimeters from the origin of the camera.
depthImage = capture.get_depth_image();
#if DEBUG_std_cout == 1
std::cout << "[depth] " << "\n"
<< "format: " << depthImage.get_format() << "\n"
<< "device_timestamp: " << depthImage.get_device_timestamp().count() << "\n"
<< "system_timestamp: " << depthImage.get_system_timestamp().count() << "\n"
<< "height*width: " << depthImage.get_height_pixels() << ", " << depthImage.get_width_pixels()
<< std::endl;
#endif
// ir
// * Each pixel of IR16 data is two bytes of little endian unsigned depth data. The value of the data represents
// * brightness.
irImage = capture.get_ir_image();
#if DEBUG_std_cout == 1
std::cout << "[ir] " << "\n"
<< "format: " << irImage.get_format() << "\n"
<< "device_timestamp: " << irImage.get_device_timestamp().count() << "\n"
<< "system_timestamp: " << irImage.get_system_timestamp().count() << "\n"
<< "height*width: " << irImage.get_height_pixels() << ", " << irImage.get_width_pixels()
<< std::endl;
#endif
//深度图和RGB图配准
k4a::calibration k4aCalibration = device.get_calibration(config.depth_mode, config.color_resolution); //获取相机标定参数
k4a::transformation k4aTransformation = k4a::transformation(k4aCalibration);
transformed_depthImage = k4aTransformation.depth_image_to_color_camera(depthImage);
cv_rgbImage_with_alpha = cv::Mat(rgbImage.get_height_pixels(), rgbImage.get_width_pixels(), CV_8UC4,
(void*)rgbImage.get_buffer());
cv::cvtColor(cv_rgbImage_with_alpha, cv_rgbImage_no_alpha, cv::COLOR_BGRA2BGR);
cv_depth = cv::Mat(transformed_depthImage.get_height_pixels(), transformed_depthImage.get_width_pixels(), CV_16U,
(void*)transformed_depthImage.get_buffer(), static_cast<size_t>(transformed_depthImage.get_stride_bytes()));
normalize(cv_depth, cv_depth_8U, 0, 256 * 256, NORM_MINMAX);
cv_depth_8U.convertTo(cv_depth, CV_8U, 1);
cv_irImage = cv::Mat(irImage.get_height_pixels(), irImage.get_width_pixels(), CV_16U,
(void*)irImage.get_buffer(), static_cast<size_t>(irImage.get_stride_bytes()));
normalize(cv_irImage, cv_irImage_8U, 0, 256 * 256, NORM_MINMAX);
cv_irImage.convertTo(cv_irImage_8U, CV_8U, 1);
// show image
/*cv::imshow("color", cv_rgbImage_no_alpha);
cv::imshow("depth", cv_depth_8U);
cv::imshow("ir", cv_irImage_8U);*/
// save image
double time_rgb = static_cast<double>(std::chrono::duration_cast<std::chrono::microseconds>(
rgbImage.get_device_timestamp()).count());
std::string filename_rgb = std::to_string(time_rgb / 1000000) + ".png";
double time_d = static_cast<double>(std::chrono::duration_cast<std::chrono::microseconds>(
depthImage.get_device_timestamp()).count());
std::string filename_d = std::to_string(time_d / 1000000) + ".png";
double time_ir = static_cast<double>(std::chrono::duration_cast<std::chrono::microseconds>(
irImage.get_device_timestamp()).count());
std::string filename_ir = std::to_string(time_ir / 1000000) + ".png";
imwrite("./rgb/" + filename_rgb, cv_rgbImage_no_alpha);
imwrite("./depth/" + filename_d, cv_depth_8U);
imwrite("./ir/" + filename_ir, cv_irImage_8U);
std::cout << "Acquiring!" << endl;
//写入depth.txt,rgb.txt文件
rgb_out << std::to_string(time_rgb / 1000000) << " " << "rgb/" << filename_rgb << endl;
d_out << std::to_string(time_d / 1000000) << " " << "depth/" << filename_d << endl;
ir_out << std::to_string(time_ir / 1000000) << " " << "ir/" << filename_ir << endl;
rgb_out << flush;
d_out << flush;
ir_out << flush;
cv_rgbImage_with_alpha.release();
cv_rgbImage_no_alpha.release();
cv_depth.release();
cv_depth_8U.release();
cv_irImage.release();
cv_irImage_8U.release();
capture.reset();
}
else {
std::cout << "false: K4A_WAIT_RESULT_TIMEOUT." << std::endl;
}
}
cv::destroyAllWindows();
rgb_out << flush;
d_out << flush;
ir_out << flush;
rgb_out.close();
d_out.close();
ir_out.close();
// 释放,关闭设备
rgbImage.reset();
depthImage.reset();
irImage.reset();
capture.reset();
device.close();
return 1;
}
点云融合
要想生成点云并获取需要在转换的时候对深度图进行归一化处理
代码
slamBase.h
# pragma once //保证头文件只被编译一次
#include <iostream>
// opencv
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
// pcl
#include <pcl/point_types.h>
#include <pcl/io/pcd_io.h>
#include <pcl/io/ply_io.h>
#include <pcl/common/transforms.h>
using namespace std;
using namespace cv;
typedef pcl::PointXYZRGB PointT;
typedef pcl::PointCloud<PointT> PointCloud;
// camera instrinsic parameters
struct CAMERA_INTRINSIC_PARAMETERS
{
double fx, fy, cx, cy, scale;
};
struct FRAME
{
cv::Mat rgb, depth;
};
PointCloud::Ptr image2PointCloud(Mat rgb, Mat depth, CAMERA_INTRINSIC_PARAMETERS camera);
PointCloud::Ptr pointCloudFusion(PointCloud::Ptr& original, FRAME& newFrame, CAMERA_INTRINSIC_PARAMETERS camera);
void readCameraTrajectory(string camTransFile, vector<Eigen::Isometry3d>& poses);
slamBase.cpp
#include "slamBase.h"
#include <string>
#include <iostream>
PointCloud::Ptr image2PointCloud(Mat rgb, Mat depth, CAMERA_INTRINSIC_PARAMETERS camera)
{
PointCloud::Ptr cloud(new PointCloud);
for (int m = 0; m < depth.rows; m++)
for (int n = 0; n < depth.cols; n++)
{
// 获取深度图中(m,n)处的值
ushort d = depth.ptr<ushort>(m)[n];
// d 可能没有值,若如此,跳过此点
if (d == 0)
continue;
// d 存在值,则向点云增加一个点
PointT p;
// 计算这个点的空间坐标
p.z = double(d) / camera.scale;
p.x = (n - camera.cx) * p.z / camera.fx;
p.y = (m - camera.cy) * p.z / camera.fy;
// 从rgb图像中获取它的颜色
p.b = rgb.ptr<uchar>(m)[n * 3];
p.g = rgb.ptr<uchar>(m)[n * 3 + 1];
p.r = rgb.ptr<uchar>(m)[n * 3 + 2];
// 把p加入到点云中
cloud->points.push_back(p);
}
// 设置并保存点云
cloud->height = 1;
cloud->width = cloud->points.size();
cloud->is_dense = false;
return cloud;
}
PointCloud::Ptr pointCloudFusion(PointCloud::Ptr& original, FRAME& newFrame, CAMERA_INTRINSIC_PARAMETERS camera)
{
PointCloud::Ptr newCloud(new PointCloud()), transCloud(new PointCloud());
newCloud = image2PointCloud(newFrame.rgb, newFrame.depth, camera);
*original += *newCloud;
return original;
}
void readCameraTrajectory(string camTransFile, vector<Eigen::Isometry3d>& poses)
{
ifstream fcamTrans(camTransFile);
if (!fcamTrans.is_open())
{
cerr << "trajectory is empty!" << endl;
return;
}
else
{
string str;
while ((getline(fcamTrans, str)))
{
Eigen::Quaterniond q;
Eigen::Vector3d t;
Eigen::Isometry3d T = Eigen::Isometry3d::Identity();
if (str.at(0) == '#') {
cout << "str" << str << endl;
continue;
}
istringstream strdata(str);
strdata >> t[0] >> t[1] >> t[2] >> q.x() >> q.y() >> q.z() >> q.w();
T.rotate(q);
T.pretranslate(t);
poses.push_back(T);
}
}
}
pointCloudFusion.cpp
#include "slamBase.h"
int main(int argc, char** argv)
{
CAMERA_INTRINSIC_PARAMETERS cameraParams{ 913.451, 913.122, 953.516, 554.09, 1 }; //相机内参
int frameNum = 3;
PointCloud::Ptr fusedCloud(new PointCloud());
for (int idx = 0; idx < frameNum; idx++)
{
string rgbPath = "D:\\data\\rgb\\" + to_string(idx) + ".png"; //图像以数字命名
string depthPath = "D:\\data\\depth\\" + to_string(idx) + ".png";
FRAME frm;
frm.rgb = cv::imread(rgbPath);
if (frm.rgb.empty()) {
cerr << "Fail to load rgb image!" << endl;
}
frm.depth = cv::imread(depthPath, -1);
if (frm.depth.empty()) {
cerr << "Fail to load depth image!" << endl;
}
if (idx == 0)
{
fusedCloud = image2PointCloud(frm.rgb, frm.depth, cameraParams);
}
else
{
fusedCloud = pointCloudFusion(fusedCloud, frm, cameraParams);
}
}
pcl::io::savePCDFile("D:\\data\\fusedCloud.pcd", *fusedCloud);
pcl::io::savePLYFile("D:\\data\\fusedCloud.ply", *fusedCloud);
cout << "END!" << endl;
return 0;
}
获取彩色图和深度图并保存为点云
// C++
#include <iostream>
#include <chrono>
#include <string>
#include <io.h>
#include <vector>
#include <direct.h>
// OpenCV
#include <opencv2/opencv.hpp>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
// Kinect DK
#include <k4a/k4a.hpp>
#include "slamBase.h"
// PCL 库
#include <pcl/io/pcd_io.h>
#include <pcl/io/ply_io.h>
#include <pcl/point_types.h>
// 定义点云类型
typedef pcl::PointXYZRGB PointT;
typedef pcl::PointCloud<PointT> PointCloud;
using namespace cv;
using namespace std;
// 宏
// 方便控制是否 std::cout 信息
#define DEBUG_std_cout 0
void regist()
{
CAMERA_INTRINSIC_PARAMETERS cameraParams{ 913.451, 913.122, 953.516, 554.09, 1 };
int frameNum = 1;
//vector<Eigen::Isometry3d> poses;
PointCloud::Ptr fusedCloud(new PointCloud());
//string cameraPosePath = path + "cameraTrajectory.txt";
//readCameraTrajectory(cameraPosePath, poses);
for (int idx = 0; idx < frameNum; idx++)
{
//string rgbPath = "D:\\data\\rgb\\" + to_string(idx) + ".png";
//string depthPath = "D:\\data\\depth\\" + to_string(idx) + ".png";
string rgbPath = "D:\\data\\0rgb.png";
string depthPath = "D:\\data\\0d.png";
//string pclPath = "D:\\data\\" + to_string(idx) + ".ply";
string pclPath = "D:\\data\\ply.ply";
FRAME frm;
frm.rgb = cv::imread(rgbPath);
if (frm.rgb.empty()) {
cerr << "Fail to load rgb image!" << endl;
}
frm.depth = cv::imread(depthPath, -1);
if (frm.depth.empty()) {
cerr << "Fail to load depth image!" << endl;
}
if (idx == 0)
{
//fusedCloud = image2PointCloud(frm.rgb, frm.depth, cameraParams);
//pcl::io::savePLYFile("D:\\data\\fusedCloud1.ply", *fusedCloud);
}
else
{
fusedCloud = pointCloudFusion(fusedCloud, frm, cameraParams);
}
fusedCloud = image2PointCloud(frm.rgb, frm.depth, cameraParams);
pcl::io::savePLYFile(pclPath, *fusedCloud);
}
//pcl::io::savePCDFile("D:\\data\\fusedCloud.pcd", *fusedCloud);
pcl::io::savePLYFile("D:\\data\\fusedCloud.ply", *fusedCloud);
cout << "END!" << endl;
}
int main3(int argc, char* argv[]) {
/*
找到并打开 Azure Kinect 设备
*/
// 发现已连接的设备数
const uint32_t device_count = k4a::device::get_installed_count();
if (0 == device_count) {
std::cout << "Error: no K4A devices found. " << std::endl;
return -1;
}
else {
std::cout << "Found " << device_count << " connected devices. " << std::endl;
if (1 != device_count)// 超过1个设备,也输出错误信息。
{
std::cout << "Error: more than one K4A devices found. " << std::endl;
return -1;
}
else// 该示例代码仅限对1个设备操作
{
std::cout << "Done: found 1 K4A device. " << std::endl;
}
}
// 打开(默认)设备
k4a::device device = k4a::device::open(K4A_DEVICE_DEFAULT);
std::cout << "Done: open device. " << std::endl;
/*
检索并保存 Azure Kinect 图像数据
*/
// 配置并启动设备
k4a_device_configuration_t config = K4A_DEVICE_CONFIG_INIT_DISABLE_ALL;
config.camera_fps = K4A_FRAMES_PER_SECOND_30;
//config.camera_fps = K4A_FRAMES_PER_SECOND_15;
config.color_format = K4A_IMAGE_FORMAT_COLOR_BGRA32;
config.color_resolution = K4A_COLOR_RESOLUTION_720P;
config.depth_mode = K4A_DEPTH_MODE_NFOV_UNBINNED;
//config.depth_mode = K4A_DEPTH_MODE_WFOV_2X2BINNED;
config.synchronized_images_only = true;// ensures that depth and color images are both available in the capture
device.start_cameras(&config);
std::cout << "Done: start camera." << std::endl;
//写入txt文件流
ofstream rgb_out;
ofstream d_out;
rgb_out.open("./rgb.txt");
d_out.open("./depth.txt");
rgb_out << "# color images" << endl;
rgb_out << "# file: rgbd_dataset" << endl;
rgb_out << "# timestamp" << " " << "filename" << endl;
d_out << "# depth images" << endl;
d_out << "# file: rgbd_dataset" << endl;
d_out << "# timestamp" << " " << "filename" << endl;
rgb_out << flush;
d_out << flush;
// 稳定化
k4a::capture capture;
int iAuto = 0;//用来稳定,类似自动曝光
int iAutoError = 0;// 统计自动曝光的失败次数
while (true) {
if (device.get_capture(&capture)) {
std::cout << iAuto << ". Capture several frames to give auto-exposure" << std::endl;
// 跳过前 n 个(成功的数据采集)循环,用来稳定
if (iAuto != 30) {
iAuto++;
continue;
}
else {
std::cout << "Done: auto-exposure" << std::endl;
break;// 跳出该循环,完成相机的稳定过程
}
}
else {
std::cout << iAutoError << ". K4A_WAIT_RESULT_TIMEOUT." << std::endl;
if (iAutoError != 30) {
iAutoError++;
continue;
}
else {
std::cout << "Error: failed to give auto-exposure. " << std::endl;
return -1;
}
}
}
std::cout << "-----------------------------------" << std::endl;
std::cout << "----- Have Started Kinect DK. -----" << std::endl;
std::cout << "-----------------------------------" << std::endl;
// 从设备获取捕获
k4a::image rgbImage;
k4a::image depthImage;
//k4a::image irImage;
k4a::image transformed_depthImage;
cv::Mat cv_rgbImage_with_alpha;
cv::Mat cv_rgbImage_no_alpha;
cv::Mat cv_depth;
cv::Mat cv_depth_8U;
int index = 0;
while (index < 1) {
if (device.get_capture(&capture)) {
// rgb
// * Each pixel of BGRA32 data is four bytes. The first three bytes represent Blue, Green,
// * and Red data. The fourth byte is the alpha channel and is unused in the Azure Kinect APIs.
rgbImage = capture.get_color_image();
#if DEBUG_std_cout == 1
std::cout << "[rgb] " << "\n"
<< "format: " << rgbImage.get_format() << "\n"
<< "device_timestamp: " << rgbImage.get_device_timestamp().count() << "\n"
<< "system_timestamp: " << rgbImage.get_system_timestamp().count() << "\n"
<< "height*width: " << rgbImage.get_height_pixels() << ", " << rgbImage.get_width_pixels()
<< std::endl;
#endif
// depth
// * Each pixel of DEPTH16 data is two bytes of little endian unsigned depth data. The unit of the data is in
// * millimeters from the origin of the camera.
depthImage = capture.get_depth_image();
#if DEBUG_std_cout == 1
std::cout << "[depth] " << "\n"
<< "format: " << depthImage.get_format() << "\n"
<< "device_timestamp: " << depthImage.get_device_timestamp().count() << "\n"
<< "system_timestamp: " << depthImage.get_system_timestamp().count() << "\n"
<< "height*width: " << depthImage.get_height_pixels() << ", " << depthImage.get_width_pixels()
<< std::endl;
#endif
//获取彩色点云
k4a::calibration k4aCalibration = device.get_calibration(config.depth_mode, config.color_resolution);
k4a::transformation k4aTransformation = k4a::transformation(k4aCalibration);
//PointCloud::Ptr cloud(new PointCloud);
int color_image_width_pixels = rgbImage.get_width_pixels();
int color_image_height_pixels = rgbImage.get_height_pixels();
transformed_depthImage = NULL;
transformed_depthImage = k4a::image::create(K4A_IMAGE_FORMAT_DEPTH16,
color_image_width_pixels,
color_image_height_pixels,
color_image_width_pixels * (int)sizeof(uint16_t));
k4a::image point_cloud_image = NULL;
point_cloud_image = k4a::image::create(K4A_IMAGE_FORMAT_CUSTOM,
color_image_width_pixels,
color_image_height_pixels,
color_image_width_pixels * 3 * (int)sizeof(int16_t));
if (depthImage.get_width_pixels() == rgbImage.get_width_pixels() && depthImage.get_height_pixels() == rgbImage.get_height_pixels()) {
std::copy(depthImage.get_buffer(), depthImage.get_buffer() + depthImage.get_height_pixels() * depthImage.get_width_pixels() * (int)sizeof(uint16_t), transformed_depthImage.get_buffer());
}
else {
k4aTransformation.depth_image_to_color_camera(depthImage, &transformed_depthImage);
}
k4aTransformation.depth_image_to_point_cloud(transformed_depthImage, K4A_CALIBRATION_TYPE_COLOR, &point_cloud_image);
pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZRGB>);
cloud->width = color_image_width_pixels;
cloud->height = color_image_height_pixels;
cloud->is_dense = false;
cloud->resize(static_cast<size_t>(color_image_width_pixels) * color_image_height_pixels);
const int16_t* point_cloud_image_data = reinterpret_cast<const int16_t*>(point_cloud_image.get_buffer());
const uint8_t* color_image_data = rgbImage.get_buffer();
for (int i = 0; i < color_image_width_pixels * color_image_height_pixels; i++) {
PointT point;
point.x = point_cloud_image_data[3 * i + 0] / 1000.0f;
point.y = point_cloud_image_data[3 * i + 1] / 1000.0f;
point.z = point_cloud_image_data[3 * i + 2] / 1000.0f;
point.b = color_image_data[4 * i + 0];
point.g = color_image_data[4 * i + 1];
point.r = color_image_data[4 * i + 2];
uint8_t alpha = color_image_data[4 * i + 3];
if (point.x == 0 && point.y == 0 && point.z == 0 && alpha == 0)
continue;
cloud->points[i] = point;
}
pcl::io::savePLYFile("D:\\data\\ply.ply", *cloud); //将点云数据保存为ply文件
}
else {
std::cout << "false: K4A_WAIT_RESULT_TIMEOUT." << std::endl;
}
index++;
}
cv::destroyAllWindows();
rgb_out << flush;
d_out << flush;
rgb_out.close();
d_out.close();
// 释放,关闭设备
rgbImage.reset();
depthImage.reset();
capture.reset();
device.close();
return 1;
}