【图像分类】【深度学习】【Pytorch版本】VisionTransformer模型算法详解
文章目录
前言
ViT是由谷歌公司的Dosovitskiy, Alexey等人在《 An Image Is Worth 16x16 Words: Transformers For Image Recognition At Scale【ICLR2021】》【论文地址】一文中提出的模型,提出了一种基于transformer结构的模型,摒弃传统的CNN结构,直接将Transformer应用到图像块序列上一样可以达到非常好的性能。
ViT(Vision Transformer)讲解
论文在模型设计方面尽可能和原始Transformer保持一致。这种有意设计简单化的优点在于对NLP的Transformer有良好的扩展性,几乎可以实现“开箱即用”。
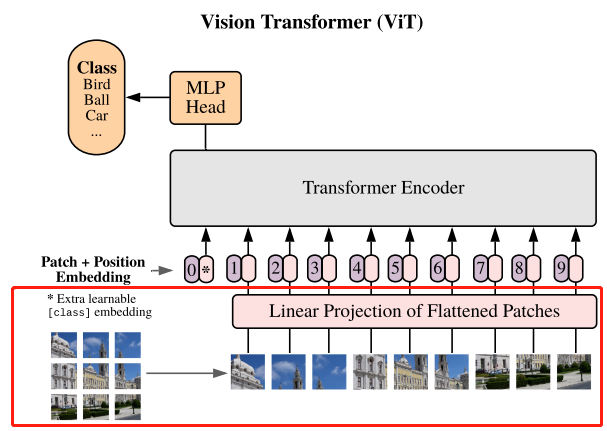
如上面的动态图所示,ViT在分类任务中的分为以下几个基本步骤:

- 图片切分为若干图片序列块
- 所有序列块经过线性映射后展平为一维向量
以上俩步是 patch embedding过程,成功将一个视觉问题转化为了一个seq2seq问题。
- positional embedding:嵌入类别编码和位置编码(用于保留位置信息)
- Transformer Encoder:主体编码器部分
- MLP
patch embedding
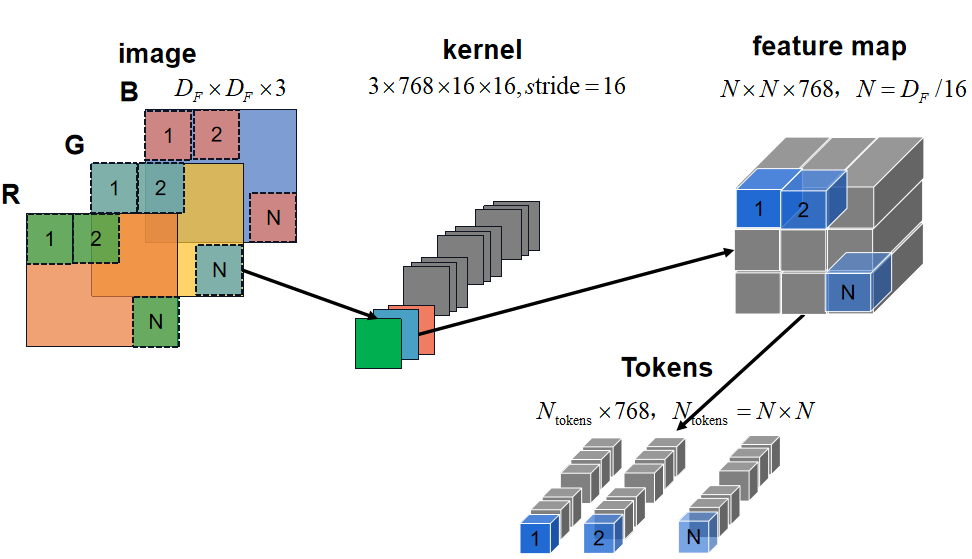
输入图片大小为224x224,将图片切分为固定大小16x16的patch,则每张图像会生成224x224/16x16=196个patch,输出序列为196;196个patch(196x3)通过线性投射层(3x768)之后的维度为196x768,即一共有196个token,每个token的维度是768。
源码其实就是卷积核大小16x16(巧妙切分成固定大小16x16的patch),卷积核通道3×768的卷积操作
通过patch embedding将一个视觉问题转化为了一个seq2seq问题,patch embedding示意图如下图所示:
class PatchEmbed(nn.Module):
"""
2D Image to Patch Embedding
"""
def __init__(self, img_size=224, patch_size=16, in_c=3, embed_dim=768, norm_layer=None):
super().__init__()
# 图片分辨率 h w
img_size = (img_size, img_size)
# 卷积核大小
patch_size = (patch_size, patch_size)
self.img_size = img_size
self.patch_size = patch_size
# 分别计算w、h方向上的patch的个数
self.grid_size = (img_size[0] // patch_size[0], img_size[1] // patch_size[1])
# 一张图片的pacth个数
self.num_patches = self.grid_size[0] * self.grid_size[1]
# 卷积的步长巧妙地实现图片切分操作,而后与patch大小一致的卷积核完成线性映射
self.proj = nn.Conv2d(in_c, embed_dim, kernel_size=patch_size, stride=patch_size)
self.norm = norm_layer(embed_dim) if norm_layer else nn.Identity() # nn.Identity()恒等函数 f(x)=x
def forward(self, x):
B, C, H, W = x.shape
assert H == self.img_size[0] and W == self.img_size[1], \
f"Input image size ({H}*{W}) doesn't match model ({self.img_size[0]}*{self.img_size[1]})."
# flatten: [B, C, H, W] -> [B, C, HW]
# transpose: [B, C, HW] -> [B, HW, C]
# 一维展平
x = self.proj(x).flatten(2).transpose(1, 2)
x = self.norm(x)
return x
demo在动态流程图中的对应部分:
positional embedding
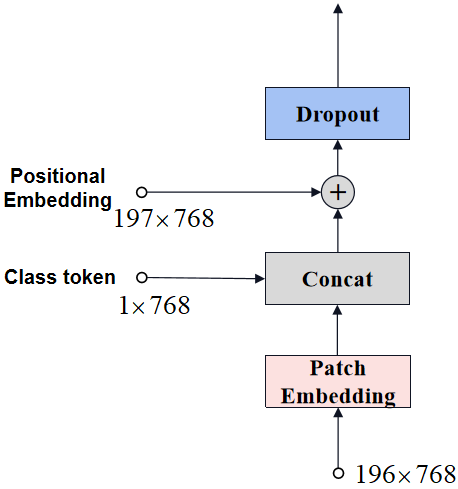
经过patch embedding后输出维度是196x768,concat一个特殊字符cls(1x768),维度变为197x768。ViT同样需要加入位置编码,位置编码可以理解为一张map,map的行数与输入序列个数相同(197),每一行代表一个向量,向量的维度和输入序列embedding的维度相同(768)。位置编码的操作是sum,所以维度依旧保持197x768。
个人理解cls和pos的作用就是ax+b中的b,是可训练的归纳偏置,因为Vision Transformer相比CNN具有更少的针对图像的归纳偏置。position embeddings在初始化时不携带任何2维位置信息,图像块之间的所有空间关系都是从头学习得到的。
positional embedding结构如下图所示:
class PositionEmbs(nn.Module):
def __init__(self, num_patches, emb_dim, dropout_rate=0.1):
super(PositionEmbs, self).__init__()
self.pos_embedding = nn.Parameter(torch.zeros(1, num_patches + 1, emb_dim))
if dropout_rate > 0:
self.dropout = nn.Dropout(dropout_rate)
else:
self.dropout = None
def forward(self, x):
out = x + self.pos_embedding
if self.dropout:
out = self.dropout(out)
return out
在class VisionTransformer的__init__函数中
# class token
self.cls_token = nn.Parameter(torch.zeros(1, 1, embed_dim))
self.dist_token = nn.Parameter(torch.zeros(1, 1, embed_dim)) if distilled else None
# positional embedding
self.pos_embedding = PositionEmbs(num_patches, embed_dim, drop_ratio)
在class VisionTransformer的forward_features函数中
cls_token = self.cls_token.expand(x.shape[0], -1, -1)
# self.dist_token暂时可以忽略
if self.dist_token is None:
x = torch.cat((cls_token, x), dim=1) # [B, 197, 768]
else:
x = torch.cat((cls_token, self.dist_token.expand(x.shape[0], -1, -1), x), dim=1)
x = self.pos_embedding(x)
demo在动态流程图中的对应部分:

Transformer Encoder
Transformer EncoderL个重复堆叠 Encoder Block组成。
class VisionTransformer(nn.Module):
def __init__(self, img_size=224, patch_size=16, in_c=3, num_classes=1000,
embed_dim=768, depth=12, num_heads=12, mlp_ratio=4.0, qkv_bias=True,
qk_scale=None, representation_size=None, distilled=False, drop_ratio=0.,
attn_drop_ratio=0., drop_path_ratio=0., embed_layer=PatchEmbed, norm_layer=None,
act_layer=None):
"""
Args:
img_size (int, tuple): input image size
patch_size (int, tuple): patch size
in_c (int): number of input channels
num_classes (int): number of classes for classification head
embed_dim (int): embedding dimension
depth (int): depth of transformer
num_heads (int): number of attention heads
mlp_ratio (int): ratio of mlp hidden dim to embedding dim
qkv_bias (bool): enable bias for qkv if True
qk_scale (float): override default qk scale of head_dim ** -0.5 if set
representation_size (Optional[int]): enable and set representation layer (pre-logits) to this value if set
distilled (bool): model includes a distillation token and head as in DeiT models
drop_ratio (float): dropout rate
attn_drop_ratio (float): attention dropout rate
drop_path_ratio (float): stochastic depth rate
embed_layer (nn.Module): patch embedding layer
norm_layer: (nn.Module): normalization layer
"""
super(VisionTransformer, self).__init__()
# 类别个数
self.num_classes = num_classes
# embed_dim默认tansformer的base 768
self.num_features = self.embed_dim = embed_dim # num_features for consistency with other models
# 源码distilled是为了其他任务,分类暂时不考虑
self.num_tokens = 2 if distilled else 1
# LayerNorm:对每单个batch进行的归一化
norm_layer = norm_layer or partial(nn.LayerNorm, eps=1e-6)
# act_layer默认tansformer的GELU
act_layer = act_layer or nn.GELU
# embed_layer默认是patch embedding,在其他应用中应该会有其他选择
# patch embedding过程
self.patch_embed = embed_layer(img_size=img_size, patch_size=patch_size, in_c=in_c, embed_dim=embed_dim)
# patche个数
num_patches = self.patch_embed.num_patches
# class token
self.cls_token = nn.Parameter(torch.zeros(1, 1, embed_dim))
self.dist_token = nn.Parameter(torch.zeros(1, 1, embed_dim)) if distilled else None
# positional embedding过程
self.pos_embedding = PositionEmbs(num_patches, embed_dim, drop_ratio)
# self.pos_embed = nn.Parameter(torch.zeros(1, num_patches + self.num_tokens, embed_dim))
# self.pos_drop = nn.Dropout(p=drop_ratio)
# depth是Block的个数
# 不同block层数 drop_ratio的概率不同,越深度越高
dpr = [x.item() for x in torch.linspace(0, drop_path_ratio, depth)] # stochastic depth decay rule
# blocks搭建
self.blocks = nn.Sequential(*[
Block(dim=embed_dim, num_heads=num_heads, mlp_ratio=mlp_ratio, qkv_bias=qkv_bias, qk_scale=qk_scale,
drop_ratio=drop_ratio, attn_drop_ratio=attn_drop_ratio, drop_path_ratio=dpr[i],
norm_layer=norm_layer, act_layer=act_layer)
for i in range(depth)
])
self.norm = norm_layer(embed_dim)
# Representation layer
if representation_size and not distilled:
self.has_logits = True
self.num_features = representation_size
self.pre_logits = nn.Sequential(OrderedDict([
("fc", nn.Linear(embed_dim, representation_size)),
("act", nn.Tanh())
]))
else:
self.has_logits = False
self.pre_logits = nn.Identity()
# Classifier head(s)
self.head = nn.Linear(self.num_features, num_classes) if num_classes > 0 else nn.Identity()
self.head_dist = None
if distilled:
self.head_dist = nn.Linear(self.embed_dim, self.num_classes) if num_classes > 0 else nn.Identity()
# Weight init
if self.dist_token is not None:
nn.init.trunc_normal_(self.dist_token, std=0.02)
nn.init.trunc_normal_(self.cls_token, std=0.02)
self.apply(_init_vit_weights)
def forward_features(self, x):
# [B, C, H, W] -> [B, num_patches, embed_dim]
x = self.patch_embed(x) # [B, 196, 768]
# [1, 1, 768] -> [B, 1, 768]
cls_token = self.cls_token.expand(x.shape[0], -1, -1)
# self.dist_token暂时可以忽略
if self.dist_token is None:
x = torch.cat((cls_token, x), dim=1) # [B, 197, 768]
else:
x = torch.cat((cls_token, self.dist_token.expand(x.shape[0], -1, -1), x), dim=1)
x = self.pos_embedding(x)
# x = self.pos_drop(x + self.pos_embed)
x = self.blocks(x)
x = self.norm(x)
if self.dist_token is None:
return self.pre_logits(x[:, 0])
else:
return x[:, 0], x[:, 1]
def forward(self, x):
x = self.forward_features(x)
if self.head_dist is not None:
x, x_dist = self.head(x[0]), self.head_dist(x[1])
if self.training and not torch.jit.is_scripting():
# during inference, return the average of both classifier predictions
return x, x_dist
else:
return (x + x_dist) / 2
else:
x = self.head(x)
return x
demo在动态流程图中的对应部分:
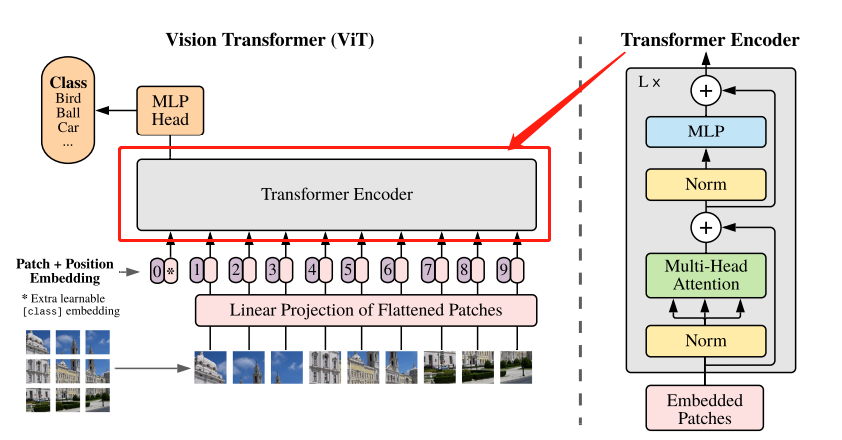
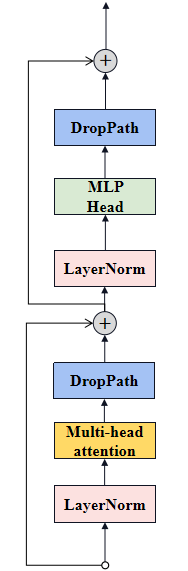
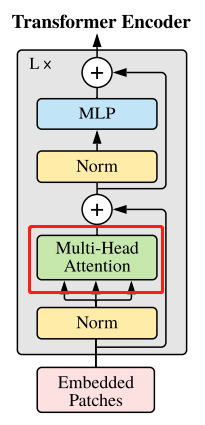
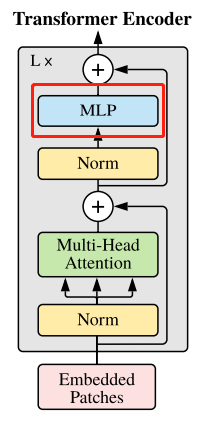
Encoder Block
组成 Transformer Encoder的单位,从低到高由LayerNorm (针对NLP领域提出的对每个token进行Norm处理)、Multi-Head Attention、DropPath(可直接换成Dropout)和 MLP等构成。
Block结构如下图所示:
class Block(nn.Module):
def __init__(self,
dim,
num_heads,
mlp_ratio=4.,
qkv_bias=False,
qk_scale=None,
drop_ratio=0.,
attn_drop_ratio=0.,
drop_path_ratio=0.,
act_layer=nn.GELU,
norm_layer=nn.LayerNorm):
super(Block, self).__init__()
self.norm1 = norm_layer(dim)
# Multi-head attention模块
self.attn = Attention(dim, num_heads=num_heads, qkv_bias=qkv_bias, qk_scale=qk_scale,
attn_drop_ratio=attn_drop_ratio, proj_drop_ratio=drop_ratio)
# NOTE: drop path for stochastic depth, we shall see if this is better than dropout here
self.drop_path = DropPath(drop_path_ratio) if drop_path_ratio > 0. else nn.Identity()
self.norm2 = norm_layer(dim)
mlp_hidden_dim = int(dim * mlp_ratio)
# MLP模块
self.mlp = Mlp(in_features=dim, hidden_features=mlp_hidden_dim, act_layer=act_layer, drop=drop_ratio)
def forward(self, x):
x = x + self.drop_path(self.attn(self.norm1(x)))
x = x + self.drop_path(self.mlp(self.norm2(x)))
return x
Multi-head attention
读者先阅读大佬的博文【Multi-head attention流程与原理参考】。这里博主结合代码也做了自己的总结供大家参考。
class Attention(nn.Module):
def __init__(self,
dim, # 输入token的dim
num_heads=8,
qkv_bias=False,
qk_scale=None,
attn_drop_ratio=0.,
proj_drop_ratio=0.):
super(Attention, self).__init__()
self.num_heads = num_heads
head_dim = dim // num_heads
self.scale = qk_scale or head_dim ** -0.5
self.qkv = nn.Linear(dim, dim * 3, bias=qkv_bias)
self.attn_drop = nn.Dropout(attn_drop_ratio)
self.proj = nn.Linear(dim, dim)
self.proj_drop = nn.Dropout(proj_drop_ratio)
def forward(self, x):
# [batch_size, num_patches + 1, total_embed_dim]
B, N, C = x.shape
# qkv(): -> [batch_size, num_patches + 1, 3 * total_embed_dim]
# reshape: -> [batch_size, num_patches + 1, 3, num_heads, embed_dim_per_head]
# permute: -> [3, batch_size, num_heads, num_patches + 1, embed_dim_per_head]
qkv = self.qkv(x).reshape(B, N, 3, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4)
# [batch_size, num_heads, num_patches + 1, embed_dim_per_head]
q, k, v = qkv[0], qkv[1], qkv[2] # make torchscript happy (cannot use tensor as tuple)
# transpose: -> [batch_size, num_heads, embed_dim_per_head, num_patches + 1]
# @: multiply -> [batch_size, num_heads, num_patches + 1, num_patches + 1]
attn = (q @ k.transpose(-2, -1)) * self.scale
attn = attn.softmax(dim=-1)
attn = self.attn_drop(attn)
# @: multiply -> [batch_size, num_heads, num_patches + 1, embed_dim_per_head]
# transpose: -> [batch_size, num_patches + 1, num_heads, embed_dim_per_head]
# reshape: -> [batch_size, num_patches + 1, total_embed_dim]
x = (attn @ v).transpose(1, 2).reshape(B, N, C)
x = self.proj(x)
x = self.proj_drop(x)
return x
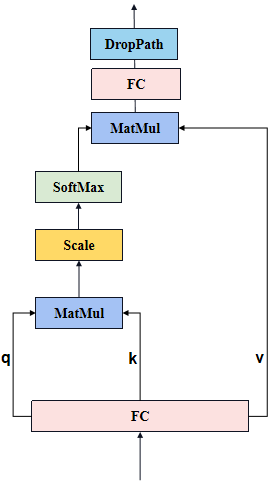
对于输入到Multi-head attention模块的特征 F(N×E) ,通过attention模块的nn.Linear进一步提取特征获得输出特征 v(value) 。为了考虑 N 个特征之间存在的亲疏和位置关系对于 v 的影响,所以需要一个额外 attn(attention) 或者理解为权重 w(weight) 对 v 进行加权操作,这引出了计算 w 所需的 q(query) 与 k(key) , q 与 k 同样是特征 F 通过nn.Linear获取。
博主将 attn习惯了称作权重 weight了,有点误导人!!!,Attention结构如下图所示:
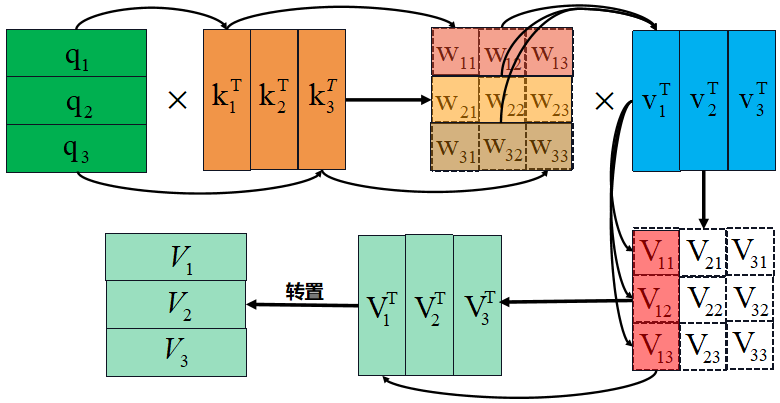
下图简要展示了q、k和v的作用,便于理解原始特征v和原始特征v经过w加权计算后的特征V。
( q n {{\rm{q}}_{\rm{n}}} qn, k n {{\rm{k}}_{\rm{n}}} kn, v n {{\rm{v}}_{\rm{n}}} vn)是特征n的经过attention模块后输出的三个特征。 q 1 {{\rm{q}}_{\rm{1}}} q1与 k 3 {{\rm{k}}_{\rm{3}}} k3矩阵计算得到权重 w 13 {{\rm{w}}_{\rm{13}}} w13,以此类推。以原始特征 v 1 {{\rm{v}}_{\rm{1}}} v1计算得到加权特征 V 1 {{\rm{V}}_{\rm{1}}} V1的过程为例, v 1 {{\rm{v}}_{\rm{1}}} v1分别于 w 1 x {{\rm{w}}_{\rm{1x}}} w1x、 w 2 x {{\rm{w}}_{\rm{2x}}} w2x和 w 3 x {{\rm{w}}_{\rm{3x}}} w3x矩阵运算得到 V 11 {{\rm{V}}_{\rm{11}}} V11、 V 12 {{\rm{V}}_{\rm{12}}} V12和 V 13 {{\rm{V}}_{\rm{13}}} V13,即最终的 V 1 {{\rm{V}}_{\rm{1}}} V1。
因此可以看到任何 V i {{\rm{V}}_{\rm{i}}} Vi都考虑了 F 中 N 个特征之间相互的影响。
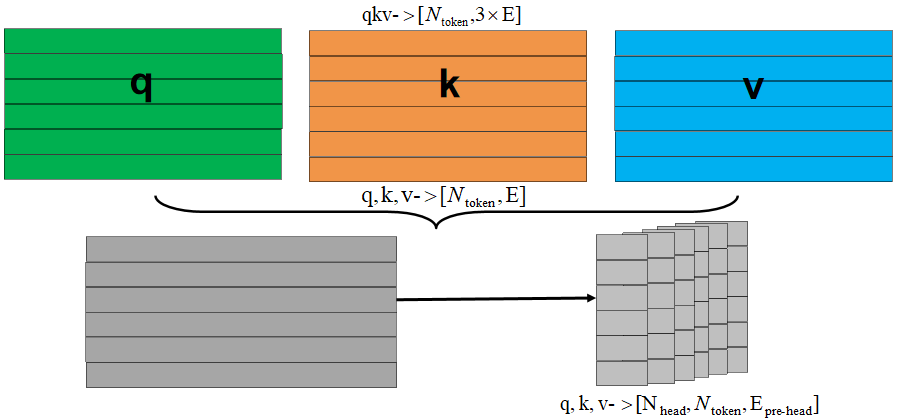
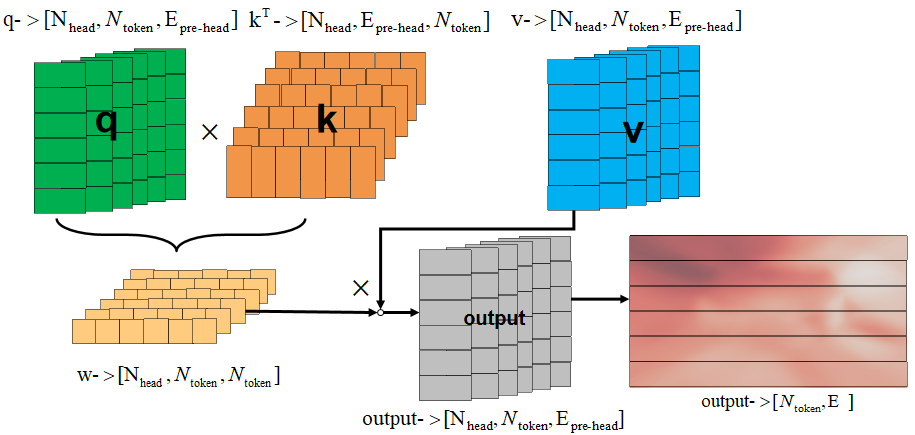
Multi-head attention的流程如下图所示(不考虑batchsize):
- 首先将每个token的qkv特征维度embed_dim均拆分到每个head的上:
- 每个head分别通过q和k计算得到权重w,权重w和v得到输出output,合并所有head的output得到最终的output:
为了便于理解Multi-head self-attention的作用,可以类比卷积网络,单一的attention就类似于普通卷积,Multi-head self-attention则类似深度可分卷积。
demo在动态流程图中的对应部分:
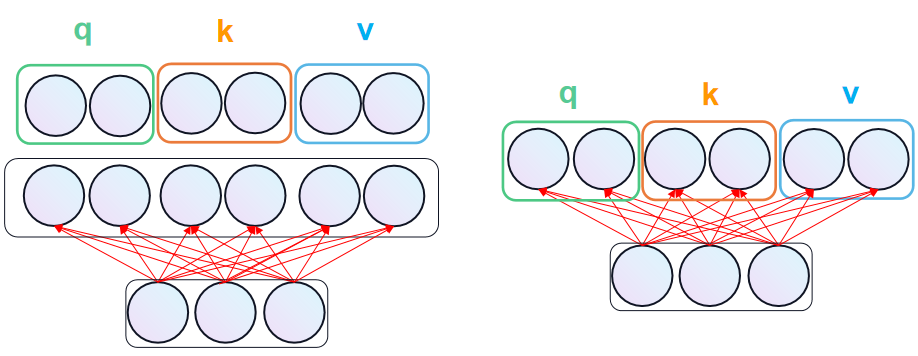
不考虑全连接的偏置,下图简单举例了3个Linear(3,2)和1个nn.Linear(3,6)再切片没有本质区别。
因此,无论q、k、v是特征F分别与3个Linear(dim,dim)操作获得,还是和一个nn.Linear(dim,3×dim)操作再切片获得,没有任何区别。
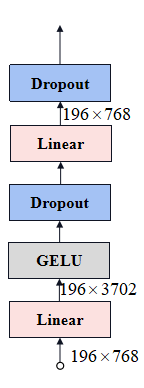
MLP
class Mlp(nn.Module):
"""
MLP as used in Vision Transformer, MLP-Mixer and related networks
"""
def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.GELU, drop=0.):
super().__init__()
out_features = out_features or in_features
hidden_features = hidden_features or in_features
self.fc1 = nn.Linear(in_features, hidden_features)
self.act = act_layer()
self.fc2 = nn.Linear(hidden_features, out_features)
self.drop = nn.Dropout(drop)
def forward(self, x):
x = self.fc1(x)
x = self.act(x)
x = self.drop(x)
x = self.fc2(x)
x = self.drop(x)
return x
demo在动态流程图中的对应部分:
完整代码
"""
original code from rwightman:
https://github.com/rwightman/pytorch-image-models/blob/master/timm/models/vision_transformer.py
"""
from functools import partial
from collections import OrderedDict
import torch
import torch.nn as nn
def drop_path(x, drop_prob: float = 0., training: bool = False):
"""
Drop paths (Stochastic Depth) per sample (when applied in main path of residual blocks).
This is the same as the DropConnect impl I created for EfficientNet, etc networks, however,
the original name is misleading as 'Drop Connect' is a different form of dropout in a separate paper...
See discussion: https://github.com/tensorflow/tpu/issues/494#issuecomment-532968956 ... I've opted for
changing the layer and argument names to 'drop path' rather than mix DropConnect as a layer name and use
'survival rate' as the argument.
"""
if drop_prob == 0. or not training:
return x
keep_prob = 1 - drop_prob
shape = (x.shape[0],) + (1,) * (x.ndim - 1) # (shape[0],1,1,1)
random_tensor = keep_prob + torch.rand(shape, dtype=x.dtype, device=x.device) # rand范围在[0~1]之间, +keep_prob在[keep_prob~keep_prob+1]之间
random_tensor.floor_() # 只保留0或者1
output = x.div(keep_prob) * random_tensor # x.div(keep_prob)个人理解是为了强化保留部分的x
return output
class DropPath(nn.Module):
"""
Drop paths (Stochastic Depth) per sample (when applied in main path of residual blocks).
"""
def __init__(self, drop_prob=None):
super(DropPath, self).__init__()
self.drop_prob = drop_prob
def forward(self, x):
return drop_path(x, self.drop_prob, self.training)
class PatchEmbed(nn.Module):
"""
2D Image to Patch Embedding
"""
def __init__(self, img_size=224, patch_size=16, in_c=3, embed_dim=768, norm_layer=None):
super().__init__()
# 图片分辨率 h w
img_size = (img_size, img_size)
# 卷积核大小
patch_size = (patch_size, patch_size)
self.img_size = img_size
self.patch_size = patch_size
# 分别计算w、h方向上的patch的个数
self.grid_size = (img_size[0] // patch_size[0], img_size[1] // patch_size[1])
# 一张图片的pacth个数
self.num_patches = self.grid_size[0] * self.grid_size[1]
# 卷积的步长巧妙地实现图片切分操作,而后与patch大小一致的卷积核完成线性映射
self.proj = nn.Conv2d(in_c, embed_dim, kernel_size=patch_size, stride=patch_size)
self.norm = norm_layer(embed_dim) if norm_layer else nn.Identity() # nn.Identity()恒等函数 f(x)=x
def forward(self, x):
B, C, H, W = x.shape
assert H == self.img_size[0] and W == self.img_size[1], \
f"Input image size ({H}*{W}) doesn't match model ({self.img_size[0]}*{self.img_size[1]})."
# flatten: [B, C, H, W] -> [B, C, HW]
# transpose: [B, C, HW] -> [B, HW, C]
# 一维展平
x = self.proj(x).flatten(2).transpose(1, 2)
x = self.norm(x)
return x
class PositionEmbs(nn.Module):
def __init__(self, num_patches, emb_dim, dropout_rate=0.1):
super(PositionEmbs, self).__init__()
self.pos_embedding = nn.Parameter(torch.zeros(1, num_patches + 1, emb_dim))
if dropout_rate > 0:
self.dropout = nn.Dropout(dropout_rate)
else:
self.dropout = None
nn.init.trunc_normal_(self.pos_embedding, std=0.02)
def forward(self, x):
out = x + self.pos_embedding
if self.dropout:
out = self.dropout(out)
return out
class Attention(nn.Module):
def __init__(self,
dim, # 输入token的dim
num_heads=8,
qkv_bias=False,
qk_scale=None,
attn_drop_ratio=0.,
proj_drop_ratio=0.):
super(Attention, self).__init__()
self.num_heads = num_heads
head_dim = dim // num_heads
self.scale = qk_scale or head_dim ** -0.5
self.qkv = nn.Linear(dim, dim * 3, bias=qkv_bias)
self.attn_drop = nn.Dropout(attn_drop_ratio)
self.proj = nn.Linear(dim, dim)
self.proj_drop = nn.Dropout(proj_drop_ratio)
def forward(self, x):
# [batch_size, num_patches + 1, total_embed_dim]
B, N, C = x.shape
# qkv(): -> [batch_size, num_patches + 1, 3 * total_embed_dim]
# reshape: -> [batch_size, num_patches + 1, 3, num_heads, embed_dim_per_head]
# permute: -> [3, batch_size, num_heads, num_patches + 1, embed_dim_per_head]
qkv = self.qkv(x).reshape(B, N, 3, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4)
# [batch_size, num_heads, num_patches + 1, embed_dim_per_head]
q, k, v = qkv[0], qkv[1], qkv[2] # make torchscript happy (cannot use tensor as tuple)
# transpose: -> [batch_size, num_heads, embed_dim_per_head, num_patches + 1]
# @: multiply -> [batch_size, num_heads, num_patches + 1, num_patches + 1]
attn = (q @ k.transpose(-2, -1)) * self.scale
attn = attn.softmax(dim=-1)
attn = self.attn_drop(attn)
# @: multiply -> [batch_size, num_heads, num_patches + 1, embed_dim_per_head]
# transpose: -> [batch_size, num_patches + 1, num_heads, embed_dim_per_head]
# reshape: -> [batch_size, num_patches + 1, total_embed_dim]
x = (attn @ v).transpose(1, 2).reshape(B, N, C)
x = self.proj(x)
x = self.proj_drop(x)
return x
class Mlp(nn.Module):
"""
MLP as used in Vision Transformer, MLP-Mixer and related networks
"""
def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.GELU, drop=0.):
super().__init__()
out_features = out_features or in_features
hidden_features = hidden_features or in_features
self.fc1 = nn.Linear(in_features, hidden_features)
self.act = act_layer()
self.fc2 = nn.Linear(hidden_features, out_features)
self.drop = nn.Dropout(drop)
def forward(self, x):
x = self.fc1(x)
x = self.act(x)
x = self.drop(x)
x = self.fc2(x)
x = self.drop(x)
return x
class Block(nn.Module):
def __init__(self,
dim,
num_heads,
mlp_ratio=4.,
qkv_bias=False,
qk_scale=None,
drop_ratio=0.,
attn_drop_ratio=0.,
drop_path_ratio=0.,
act_layer=nn.GELU,
norm_layer=nn.LayerNorm):
super(Block, self).__init__()
self.norm1 = norm_layer(dim)
# Multi-head attention模块
self.attn = Attention(dim, num_heads=num_heads, qkv_bias=qkv_bias, qk_scale=qk_scale,
attn_drop_ratio=attn_drop_ratio, proj_drop_ratio=drop_ratio)
# NOTE: drop path for stochastic depth, we shall see if this is better than dropout here
self.drop_path = DropPath(drop_path_ratio) if drop_path_ratio > 0. else nn.Identity()
self.norm2 = norm_layer(dim)
mlp_hidden_dim = int(dim * mlp_ratio)
# MLP模块
self.mlp = Mlp(in_features=dim, hidden_features=mlp_hidden_dim, act_layer=act_layer, drop=drop_ratio)
def forward(self, x):
x = x + self.drop_path(self.attn(self.norm1(x)))
x = x + self.drop_path(self.mlp(self.norm2(x)))
return x
class VisionTransformer(nn.Module):
def __init__(self, img_size=224, patch_size=16, in_c=3, num_classes=1000,
embed_dim=768, depth=12, num_heads=12, mlp_ratio=4.0, qkv_bias=True,
qk_scale=None, representation_size=None, distilled=False, drop_ratio=0.,
attn_drop_ratio=0., drop_path_ratio=0., embed_layer=PatchEmbed, norm_layer=None,
act_layer=None):
"""
Args:
img_size (int, tuple): input image size
patch_size (int, tuple): patch size
in_c (int): number of input channels
num_classes (int): number of classes for classification head
embed_dim (int): embedding dimension
depth (int): depth of transformer
num_heads (int): number of attention heads
mlp_ratio (int): ratio of mlp hidden dim to embedding dim
qkv_bias (bool): enable bias for qkv if True
qk_scale (float): override default qk scale of head_dim ** -0.5 if set
representation_size (Optional[int]): enable and set representation layer (pre-logits) to this value if set
distilled (bool): model includes a distillation token and head as in DeiT models
drop_ratio (float): dropout rate
attn_drop_ratio (float): attention dropout rate
drop_path_ratio (float): stochastic depth rate
embed_layer (nn.Module): patch embedding layer
norm_layer: (nn.Module): normalization layer
"""
super(VisionTransformer, self).__init__()
# 类别个数
self.num_classes = num_classes
# embed_dim默认tansformer的base 768
self.num_features = self.embed_dim = embed_dim # num_features for consistency with other models
# 源码distilled是为了其他任务,分类暂时不考虑
self.num_tokens = 2 if distilled else 1
# LayerNorm:对每单个batch进行的归一化
norm_layer = norm_layer or partial(nn.LayerNorm, eps=1e-6)
# act_layer默认tansformer的GELU
act_layer = act_layer or nn.GELU
# embed_layer默认是patch embedding,在其他应用中应该会有其他选择
# patch embedding过程
self.patch_embed = embed_layer(img_size=img_size, patch_size=patch_size, in_c=in_c, embed_dim=embed_dim)
# patche个数
num_patches = self.patch_embed.num_patches
# class token
self.cls_token = nn.Parameter(torch.zeros(1, 1, embed_dim))
self.dist_token = nn.Parameter(torch.zeros(1, 1, embed_dim)) if distilled else None
# positional embedding过程
self.pos_embedding = PositionEmbs(num_patches, embed_dim, drop_ratio)
# self.pos_embed = nn.Parameter(torch.zeros(1, num_patches + self.num_tokens, embed_dim))
# self.pos_drop = nn.Dropout(p=drop_ratio)
# depth是Block的个数
# 不同block层数 drop_ratio的概率不同,越深度越高
dpr = [x.item() for x in torch.linspace(0, drop_path_ratio, depth)] # stochastic depth decay rule
# blocks搭建
self.blocks = nn.Sequential(*[
Block(dim=embed_dim, num_heads=num_heads, mlp_ratio=mlp_ratio, qkv_bias=qkv_bias, qk_scale=qk_scale,
drop_ratio=drop_ratio, attn_drop_ratio=attn_drop_ratio, drop_path_ratio=dpr[i],
norm_layer=norm_layer, act_layer=act_layer)
for i in range(depth)
])
self.norm = norm_layer(embed_dim)
# Representation layer
if representation_size and not distilled:
self.has_logits = True
self.num_features = representation_size
self.pre_logits = nn.Sequential(OrderedDict([
("fc", nn.Linear(embed_dim, representation_size)),
("act", nn.Tanh())
]))
else:
self.has_logits = False
self.pre_logits = nn.Identity()
# Classifier head(s)
self.head = nn.Linear(self.num_features, num_classes) if num_classes > 0 else nn.Identity()
self.head_dist = None
if distilled:
self.head_dist = nn.Linear(self.embed_dim, self.num_classes) if num_classes > 0 else nn.Identity()
# Weight init
if self.dist_token is not None:
nn.init.trunc_normal_(self.dist_token, std=0.02)
nn.init.trunc_normal_(self.cls_token, std=0.02)
self.apply(_init_vit_weights)
def forward_features(self, x):
# [B, C, H, W] -> [B, num_patches, embed_dim]
x = self.patch_embed(x) # [B, 196, 768]
# [1, 1, 768] -> [B, 1, 768]
cls_token = self.cls_token.expand(x.shape[0], -1, -1)
# self.dist_token暂时可以忽略
if self.dist_token is None:
x = torch.cat((cls_token, x), dim=1) # [B, 197, 768]
else:
x = torch.cat((cls_token, self.dist_token.expand(x.shape[0], -1, -1), x), dim=1)
x = self.pos_embedding(x)
# x = self.pos_drop(x + self.pos_embed)
x = self.blocks(x)
x = self.norm(x)
if self.dist_token is None:
return self.pre_logits(x[:, 0])
else:
return x[:, 0], x[:, 1]
def forward(self, x):
x = self.forward_features(x)
if self.head_dist is not None:
x, x_dist = self.head(x[0]), self.head_dist(x[1])
if self.training and not torch.jit.is_scripting():
# during inference, return the average of both classifier predictions
return x, x_dist
else:
return (x + x_dist) / 2
else:
x = self.head(x)
return x
def _init_vit_weights(m):
"""
ViT weight initialization
:param m: module
"""
if isinstance(m, nn.Linear):
nn.init.trunc_normal_(m.weight, std=.01)
if m.bias is not None:
nn.init.zeros_(m.bias)
elif isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode="fan_out")
if m.bias is not None:
nn.init.zeros_(m.bias)
elif isinstance(m, nn.LayerNorm):
nn.init.zeros_(m.bias)
nn.init.ones_(m.weight)
def vit_base_patch16_224(num_classes: int = 1000):
"""
ViT-Base model (ViT-B/16) from original paper (https://arxiv.org/abs/2010.11929).
ImageNet-1k weights @ 224x224, source https://github.com/google-research/vision_transformer.
weights ported from official Google JAX impl:
链接: https://pan.baidu.com/s/1zqb08naP0RPqqfSXfkB2EA 密码: eu9f
"""
model = VisionTransformer(img_size=224,
patch_size=16,
embed_dim=768,
depth=12,
num_heads=12,
representation_size=None,
num_classes=num_classes)
return model
def vit_base_patch16_224_in21k(num_classes: int = 21843, has_logits: bool = True):
"""
ViT-Base model (ViT-B/16) from original paper (https://arxiv.org/abs/2010.11929).
ImageNet-21k weights @ 224x224, source https://github.com/google-research/vision_transformer.
weights ported from official Google JAX impl:
https://github.com/rwightman/pytorch-image-models/releases/download/v0.1-vitjx/jx_vit_base_patch16_224_in21k-e5005f0a.pth
"""
model = VisionTransformer(img_size=224,
patch_size=16,
embed_dim=768,
depth=12,
num_heads=12,
representation_size=768 if has_logits else None,
num_classes=num_classes)
return model
def vit_base_patch32_224(num_classes: int = 1000):
"""
ViT-Base model (ViT-B/32) from original paper (https://arxiv.org/abs/2010.11929).
ImageNet-1k weights @ 224x224, source https://github.com/google-research/vision_transformer.
weights ported from official Google JAX impl:
链接: https://pan.baidu.com/s/1hCv0U8pQomwAtHBYc4hmZg 密码: s5hl
"""
model = VisionTransformer(img_size=224,
patch_size=32,
embed_dim=768,
depth=12,
num_heads=12,
representation_size=None,
num_classes=num_classes)
return model
def vit_base_patch32_224_in21k(num_classes: int = 21843, has_logits: bool = True):
"""
ViT-Base model (ViT-B/32) from original paper (https://arxiv.org/abs/2010.11929).
ImageNet-21k weights @ 224x224, source https://github.com/google-research/vision_transformer.
weights ported from official Google JAX impl:
https://github.com/rwightman/pytorch-image-models/releases/download/v0.1-vitjx/jx_vit_base_patch32_224_in21k-8db57226.pth
"""
model = VisionTransformer(img_size=224,
patch_size=32,
embed_dim=768,
depth=12,
num_heads=12,
representation_size=768 if has_logits else None,
num_classes=num_classes)
return model
def vit_large_patch16_224(num_classes: int = 1000):
"""
ViT-Large model (ViT-L/16) from original paper (https://arxiv.org/abs/2010.11929).
ImageNet-1k weights @ 224x224, source https://github.com/google-research/vision_transformer.
weights ported from official Google JAX impl:
链接: https://pan.baidu.com/s/1cxBgZJJ6qUWPSBNcE4TdRQ 密码: qqt8
"""
model = VisionTransformer(img_size=224,
patch_size=16,
embed_dim=1024,
depth=24,
num_heads=16,
representation_size=None,
num_classes=num_classes)
return model
def vit_large_patch16_224_in21k(num_classes: int = 21843, has_logits: bool = True):
"""
ViT-Large model (ViT-L/16) from original paper (https://arxiv.org/abs/2010.11929).
ImageNet-21k weights @ 224x224, source https://github.com/google-research/vision_transformer.
weights ported from official Google JAX impl:
https://github.com/rwightman/pytorch-image-models/releases/download/v0.1-vitjx/jx_vit_large_patch16_224_in21k-606da67d.pth
"""
model = VisionTransformer(img_size=224,
patch_size=16,
embed_dim=1024,
depth=24,
num_heads=16,
representation_size=1024 if has_logits else None,
num_classes=num_classes)
return model
def vit_large_patch32_224_in21k(num_classes: int = 21843, has_logits: bool = True):
"""
ViT-Large model (ViT-L/32) from original paper (https://arxiv.org/abs/2010.11929).
ImageNet-21k weights @ 224x224, source https://github.com/google-research/vision_transformer.
weights ported from official Google JAX impl:
https://github.com/rwightman/pytorch-image-models/releases/download/v0.1-vitjx/jx_vit_large_patch32_224_in21k-9046d2e7.pth
"""
model = VisionTransformer(img_size=224,
patch_size=32,
embed_dim=1024,
depth=24,
num_heads=16,
representation_size=1024 if has_logits else None,
num_classes=num_classes)
return model
def vit_huge_patch14_224_in21k(num_classes: int = 21843, has_logits: bool = True):
"""
ViT-Huge model (ViT-H/14) from original paper (https://arxiv.org/abs/2010.11929).
ImageNet-21k weights @ 224x224, source https://github.com/google-research/vision_transformer.
NOTE: converted weights not currently available, too large for github release hosting.
"""
model = VisionTransformer(img_size=224,
patch_size=14,
embed_dim=1280,
depth=32,
num_heads=16,
representation_size=1280 if has_logits else None,
num_classes=num_classes)
return model
总结
尽可能简单、详细的介绍了深度可分卷积的原理和卷积过程,讲解了ViT模型的结构和pytorch代码。