1、轮廓或者快速匹配中支持建立多个模型,按照从上而下的顺序进行匹配,匹配上了即停止后续模版的匹配。


2、如果要多个模版都参与匹配,则需要打开“全部搜索模式”。


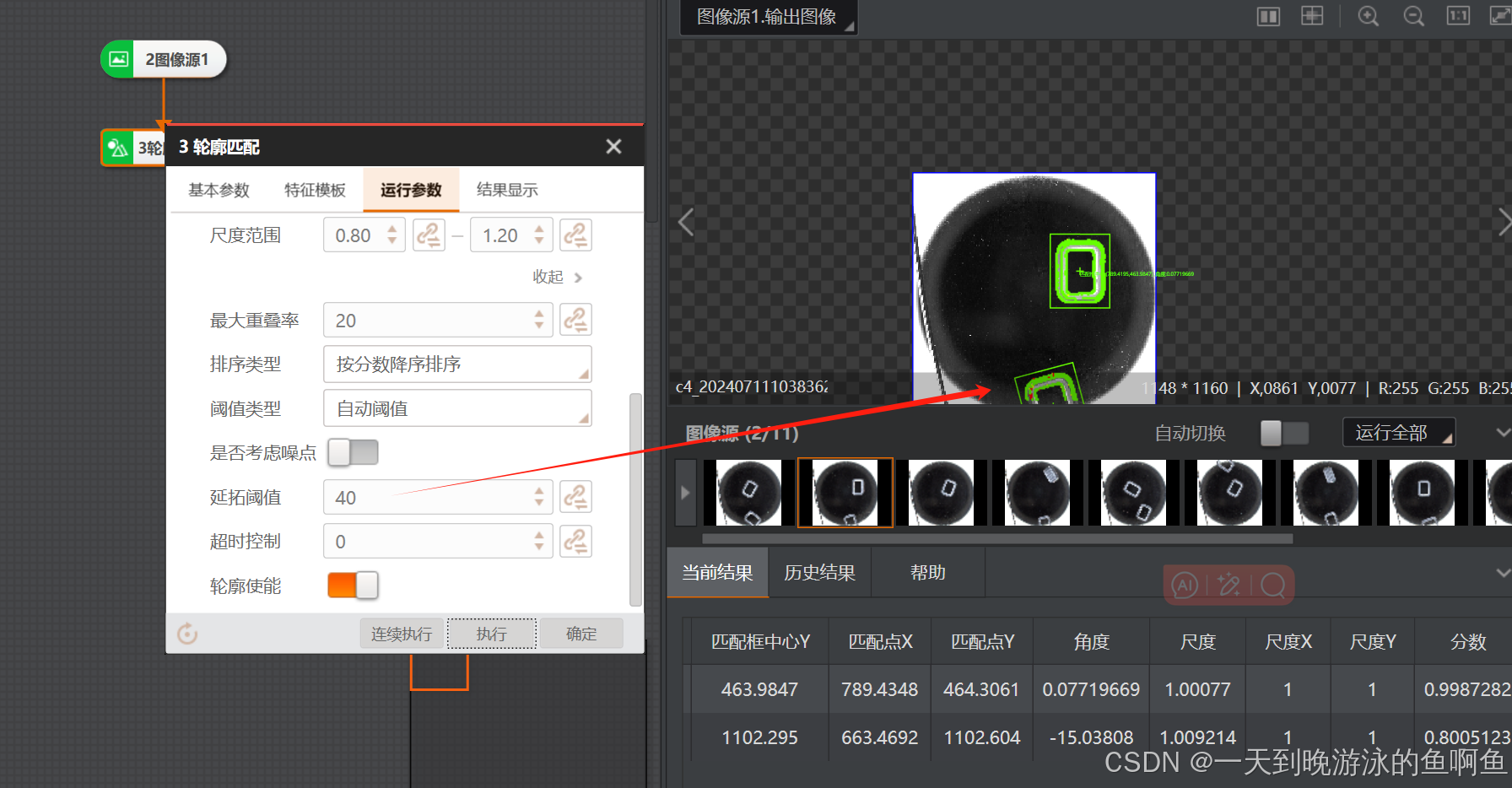
3、延拓阈值
“延拓阈值”,看参数名字不知所云,文档里也描述的也不太清楚。实际上是说检测目标跑出相机拍照范围了,只有一部分在图像中,设置的缺失比例。

延拓阈值默认为0,则半个零件匹配不到

延拓阈值默认为20,则虽然零件匹配上了,但是方向是不对的。

延拓阈值默认为40,则匹配方向是对的。
1、轮廓或者快速匹配中支持建立多个模型,按照从上而下的顺序进行匹配,匹配上了即停止后续模版的匹配。
2、如果要多个模版都参与匹配,则需要打开“全部搜索模式”。
3、延拓阈值
“延拓阈值”,看参数名字不知所云,文档里也描述的也不太清楚。实际上是说检测目标跑出相机拍照范围了,只有一部分在图像中,设置的缺失比例。
延拓阈值默认为0,则半个零件匹配不到
延拓阈值默认为20,则虽然零件匹配上了,但是方向是不对的。
延拓阈值默认为40,则匹配方向是对的。
道可道,非常道;名可名,非常名。 无名,天地之始,有名,万物之母。 故常无欲,以观其妙,常有欲,以观其徼。 此两者,同出而异名,同谓之玄,玄之又玄,众妙之门。