目录
教程来源:MindSpore
一、背景与目的
最近对生成模型非常感兴趣,尤其是扩散模型(Diffusion Models),它在图像生成等领域取得了显著成果。为了深入理解扩散模型的原理和实现,我选择在华为云的ModelArts平台上运行MindSpore官方提供的扩散模型教程。希望通过这次实践,能够掌握扩散模型的基本架构、训练过程以及生成图像的原理。
二、环境搭建
- 华为云ModelArts平台:注册并登录华为云账号,创建一个ModelArts项目,选择合适的计算资源(如GPU资源)。
创建一个notebook

选择好AI框架的镜像,再选择GPU模式,磁盘存储默认即可
- MindSpore框架:在ModelArts环境中安装MindSpore框架。可以通过华为云提供的镜像或手动安装MindSpore来完成。
这里我选择在镜像市场拉了一个mindspore2.0版本的镜像
- 依赖库安装:根据教程要求,安装所需的依赖库,如numpy、matplotlib、tqdm等。在ModelArts的Jupyter Notebook环境中,使用pip install命令进行安装。
三、模型原理学习
- 扩散模型概述:扩散模型是一种生成模型,通过逐步添加噪声将数据分布转换为简单分布(如高斯分布),然后通过学习逆向去噪过程生成数据样本。它包括正向扩散过程和逆向去噪过程。正向过程是将高斯噪声逐渐添加到图像中,直到变成纯噪声;逆向过程是通过神经网络从纯噪声逐渐去噪,最终生成实际图像。
- 前向过程与逆向过程:
- 前向过程:根据预定义的方差计划,在每个时间步长添加高斯噪声。使用公式q(xt ∥xt−1 )=N(xt ;1−βt xt−1 ,βt I)来实现噪声的添加。
- 逆向过程:利用神经网络学习条件概率分布pθ (xt−1 ∥xt ),通过优化目标函数(如均方误差)来训练神经网络预测噪声,从而实现去噪。
- U-Net神经网络:教程中使用U-Net作为神经网络架构,它包含编码器、解码器和瓶颈层,通过残差连接改善梯度流。U-Net能够接收带噪声的图像,并预测添加到输入中的噪声,从而实现逆向去噪。
class Unet(nn.Cell):
def __init__(
self,
dim,
init_dim=None,
out_dim=None,
dim_mults=(1, 2, 4, 8),
channels=3,
with_time_emb=True,
convnext_mult=2,
):
super().__init__()
self.channels = channels
init_dim = default(init_dim, dim // 3 * 2)
self.init_conv = nn.Conv2d(channels, init_dim, 7, padding=3, pad_mode="pad", has_bias=True)
dims = [init_dim, *map(lambda m: dim * m, dim_mults)]
in_out = list(zip(dims[:-1], dims[1:]))
block_klass = partial(ConvNextBlock, mult=convnext_mult)
if with_time_emb:
time_dim = dim * 4
self.time_mlp = nn.SequentialCell(
SinusoidalPositionEmbeddings(dim),
nn.Dense(dim, time_dim),
nn.GELU(),
nn.Dense(time_dim, time_dim),
)
else:
time_dim = None
self.time_mlp = None
self.downs = nn.CellList([])
self.ups = nn.CellList([])
num_resolutions = len(in_out)
for ind, (dim_in, dim_out) in enumerate(in_out):
is_last = ind >= (num_resolutions - 1)
self.downs.append(
nn.CellList(
[
block_klass(dim_in, dim_out, time_emb_dim=time_dim),
block_klass(dim_out, dim_out, time_emb_dim=time_dim),
Residual(PreNorm(dim_out, LinearAttention(dim_out))),
Downsample(dim_out) if not is_last else nn.Identity(),
]
)
)
mid_dim = dims[-1]
self.mid_block1 = block_klass(mid_dim, mid_dim, time_emb_dim=time_dim)
self.mid_attn = Residual(PreNorm(mid_dim, Attention(mid_dim)))
self.mid_block2 = block_klass(mid_dim, mid_dim, time_emb_dim=time_dim)
for ind, (dim_in, dim_out) in enumerate(reversed(in_out[1:])):
is_last = ind >= (num_resolutions - 1)
self.ups.append(
nn.CellList(
[
block_klass(dim_out * 2, dim_in, time_emb_dim=time_dim),
block_klass(dim_in, dim_in, time_emb_dim=time_dim),
Residual(PreNorm(dim_in, LinearAttention(dim_in))),
Upsample(dim_in) if not is_last else nn.Identity(),
]
)
)
out_dim = default(out_dim, channels)
self.final_conv = nn.SequentialCell(
block_klass(dim, dim), nn.Conv2d(dim, out_dim, 1)
)
def construct(self, x, time):
x = self.init_conv(x)
t = self.time_mlp(time) if exists(self.time_mlp) else None
h = []
for block1, block2, attn, downsample in self.downs:
x = block1(x, t)
x = block2(x, t)
x = attn(x)
h.append(x)
x = downsample(x)
x = self.mid_block1(x, t)
x = self.mid_attn(x)
x = self.mid_block2(x, t)
len_h = len(h) - 1
for block1, block2, attn, upsample in self.ups:
x = ops.concat((x, h[len_h]), 1)
len_h -= 1
x = block1(x, t)
x = block2(x, t)
x = attn(x)
x = upsample(x)
return self.final_conv(x)
引用自Diffusion扩散模型 — MindSpore master documentation
解析:
条件 U-Net 神经网络,用于扩散模型中的逆向去噪过程。
1. 类定义与初始化
class Unet(nn.Cell):
def __init__(
self,
dim,
init_dim=None,
out_dim=None,
dim_mults=(1, 2, 4, 8),
channels=3,
with_time_emb=True,
convnext_mult=2,
):
super().__init__()
- Unet 类:继承自 MindSpore 的 nn.Cell,表示这是一个神经网络模块。
- 参数说明:
- dim:基础维度,用于控制网络中卷积层的通道数。
- init_dim:初始卷积层的输出通道数,默认为 dim // 3 * 2。
- out_dim:最终输出的通道数,默认为输入图像的通道数(channels)。
- dim_mults:一个元组,表示每个分辨率级别上的通道数放大倍数。例如 (1, 2, 4, 8) 表示在四个级别上,通道数分别为 dim、2*dim、4*dim、8*dim。
- channels:输入图像的通道数,默认为 3(RGB 图像)。
- with_time_emb:是否使用时间嵌入(time embedding),用于将时间步长信息编码到网络中。
- convnext_mult:ConvNeXT 块中的扩展倍数,默认为 2。
2. 初始卷积层
self.channels = channels
init_dim = default(init_dim, dim // 3 * 2)
self.init_conv = nn.Conv2d(channels, init_dim, 7, padding=3, pad_mode="pad", has_bias=True)
- self.channels:保存输入图像的通道数。
- init_dim:计算初始卷积层的输出通道数。如果 init_dim 未指定,则默认为 dim // 3 * 2。
- self.init_conv:定义一个卷积层,将输入图像的通道数从 channels 转换为 init_dim。卷积核大小为 7×7,填充为 3,以保持图像的空间尺寸。
3. 时间嵌入模块
if with_time_emb:
time_dim = dim * 4
self.time_mlp = nn.SequentialCell(
SinusoidalPositionEmbeddings(dim),
nn.Dense(dim, time_dim),
nn.GELU(),
nn.Dense(time_dim, time_dim),
)
else:
time_dim = None
self.time_mlp = None
- with_time_emb:如果为 True,则启用时间嵌入模块。
- time_dim:时间嵌入的维度,设置为 dim * 4。
- self.time_mlp:定义一个时间嵌入模块,包含以下部分:
- SinusoidalPositionEmbeddings(dim):使用正弦位置嵌入将时间步长编码为高维向量。
- nn.Dense(dim, time_dim):将嵌入向量的维度从 dim 扩展到 time_dim。
- nn.GELU():应用 GELU 激活函数。
- nn.Dense(time_dim, time_dim):再次将维度扩展到 time_dim。
- 如果 with_time_emb 为 False,则时间嵌入模块为空。
4. 下采样模块
self.downs = nn.CellList([])
self.ups = nn.CellList([])
num_resolutions = len(in_out)
for ind, (dim_in, dim_out) in enumerate(in_out):
is_last = ind >= (num_resolutions - 1)
self.downs.append(
nn.CellList(
[
block_klass(dim_in, dim_out, time_emb_dim=time_dim),
block_klass(dim_out, dim_out, time_emb_dim=time_dim),
Residual(PreNorm(dim_out, LinearAttention(dim_out))),
Downsample(dim_out) if not is_last else nn.Identity(),
]
)
)
- self.downs:一个 CellList,用于存储所有下采样模块。
- in_out:一个列表,包含每个分辨率级别上的输入和输出通道数。
- 循环:对每个分辨率级别,构建一个下采样模块,包含以下部分:
- 两个 ConvNeXT 块:用于特征提取,每个块的输入通道数为 dim_in,输出通道数为 dim_out。
- 一个 LinearAttention 块:用于注意力机制,提升特征的表达能力。
- 一个下采样操作:如果当前级别不是最后一个级别,则使用 Downsample 操作进行下采样;否则,使用 nn.Identity(即不进行下采样)。
5. 中间模块
mid_dim = dims[-1]
self.mid_block1 = block_klass(mid_dim, mid_dim, time_emb_dim=time_dim)
self.mid_attn = Residual(PreNorm(mid_dim, Attention(mid_dim)))
self.mid_block2 = block_klass(mid_dim, mid_dim, time_emb_dim=time_dim)
- mid_dim:中间模块的通道数,等于最后一个下采样模块的输出通道数。
- self.mid_block1 和 self.mid_block2:两个 ConvNeXT 块,用于进一步提取特征。
- self.mid_attn:一个注意力模块,用于增强特征的表达能力。
6. 上采样模块
for ind, (dim_in, dim_out) in enumerate(reversed(in_out[1:])):
is_last = ind >= (num_resolutions - 1)
self.ups.append(
nn.CellList(
[
block_klass(dim_out * 2, dim_in, time_emb_dim=time_dim),
block_klass(dim_in, dim_in, time_emb_dim=time_dim),
Residual(PreNorm(dim_in, LinearAttention(dim_in))),
Upsample(dim_in) if not is_last else nn.Identity(),
]
)
)
- self.ups:一个 CellList,用于存储所有上采样模块。
- reversed(in_out[1:]):从倒数第二个级别开始,逆序遍历分辨率级别。
- 循环:对每个分辨率级别,构建一个上采样模块,包含以下部分:
- 两个 ConvNeXT 块:用于特征提取,第一个块的输入通道数为 dim_out * 2(因为会拼接来自下采样模块的特征),输出通道数为 dim_in。
- 一个 LinearAttention 块:用于注意力机制。
- 一个上采样操作:如果当前级别不是最后一个级别,则使用 Upsample 操作进行上采样;否则,使用 nn.Identity。
7. 最终卷积层
out_dim = default(out_dim, channels)
self.final_conv = nn.SequentialCell(
block_klass(dim, dim), nn.Conv2d(dim, out_dim, 1)
)
- out_dim:最终输出的通道数,默认为输入图像的通道数。
- self.final_conv:定义一个最终卷积层,包含以下部分:
- 一个 ConvNeXT 块:用于最后的特征提取。
- 一个卷积层:将通道数从 dim 转换为 out_dim,卷积核大小为 1×1。
8. 前向传播
def construct(self, x, time):
x = self.init_conv(x)
t = self.time_mlp(time) if exists(self.time_mlp) else None
h = []
for block1, block2, attn, downsample in self.downs:
x = block1(x, t)
x = block2(x, t)
x = attn(x)
h.append(x)
x = downsample(x)
x = self.mid_block1(x, t)
x = self.mid_attn(x)
x = self.mid_block2(x, t)
len_h = len(h) - 1
for block1, block2, attn, upsample in self.ups:
x = ops.concat((x, h[len_h]), 1)
len_h -= 1
x = block1(x, t)
x = block2(x, t)
x = attn(x)
x = upsample(x)
return self.final_conv(x)
- 输入:
- x:输入图像。
- time:时间步长信息。
- 前向传播过程:
- 初始卷积:通过 self.init_conv 将输入图像的通道数从 channels 转换为 init_dim。
- 时间嵌入:如果启用时间嵌入模块,则将时间步长信息通过 self.time_mlp 转换为高维向量。
- 下采样:依次通过每个下采样模块,提取特征并逐步降低图像的空间分辨率。将每个下采样模块的输出特征保存到列表 h 中。
- 中间模块:通过中间模块的两个 ConvNeXT 块和注意力模块,进一步提取特征。
- 上采样:逆序通过每个上采样模块,逐步恢复图像的空间分辨率。在每个上采样模块中,将当前特征与之前保存的特征进行拼接,然后通过两个 ConvNeXT 块和注意力模块进行特征提取。
- 最终卷积:通过最终卷积层,将通道数从 dim 转换为 out_dim,得到最终的输出。
9. 关键点总结
- U-Net 结构:网络采用 U-Net 结构,包含下采样模块、中间模块和上采样模块。下采样模块逐步降低图像分辨率,提取高层特征;上采样模块逐步恢复图像分辨率,生成最终输出。
- 时间嵌入:通过正弦位置嵌入将时间步长信息编码到网络中,使网络能够根据不同的时间步长进行去噪。
- 注意力机制:在下采样和上采样模块中引入注意力机制,增强特征的表达能力。
- 特征拼接:在上采样过程中,将当前特征与之前保存的特征进行拼接,保留更多的细节信息,有助于生成更高质量的图像。
这个 U-Net 网络是扩散模型中的核心部分,通过学习逆向去噪过程,能够从纯噪声逐步生成实际图像。
四、代码实现与运行
- 数据准备:使用Fashion-MNIST数据集进行训练。通过mindspore.dataset模块加载数据集,并进行预处理,包括随机水平翻转、标准化等操作,将图像值缩放到[−1,1]范围内。
- 模型构建:根据教程提供的代码,构建扩散模型的各个模块,包括位置嵌入模块、ResNet/ConvNeXT块、Attention模块、组归一化模块以及条件U-Net网络。特别注意U-Net网络的结构和参数配置,确保其能够正确接收输入并输出预测噪声。
- 正向扩散过程实现:定义正向扩散过程的函数q_sample,根据时间步长和噪声计划,将噪声添加到输入图像中。通过可视化不同时间步长下的噪声图像,观察噪声逐渐增加的过程。
- 训练过程:
- 定义损失函数p_losses,计算真实噪声和预测噪声之间的均方误差,并结合权重进行优化。
- 使用Adam优化器进行训练,设置动态学习率(如余弦衰减学习率)。在训练过程中,随机采样时间步长和噪声水平,优化神经网络的参数。
- 训练过程中,定期打印损失值,观察模型的收敛情况。同时,可以使用采样函数sample在训练过程中生成图像样本,观察模型生成能力的变化。
import time
epochs = 10
iterator = dataset.create_tuple_iterator(num_epochs=epochs)
for epoch in range(epochs):
begin_time = time.time()
for step, batch in enumerate(iterator):
unet_model.set_train()
batch_size = batch[0].shape[0]
t = randint(0, timesteps, (batch_size,), dtype=ms.int32)
noise = randn_like(batch[0])
loss = train_step(batch[0], t, noise)
if step % 500 == 0:
print(" epoch: ", epoch, " step: ", step, " Loss: ", loss)
end_time = time.time()
times = end_time - begin_time
print("training time:", times, "s")
# 展示随机采样效果
unet_model.set_train(False)
samples = sample(unet_model, image_size=image_size, batch_size=64, channels=channels)
plt.imshow(samples[-1][5].reshape(image_size, image_size, channels), cmap="gray")
print("Training Success!")
代码来源:Diffusion扩散模型 — MindSpore master documentation
一共训练了10轮
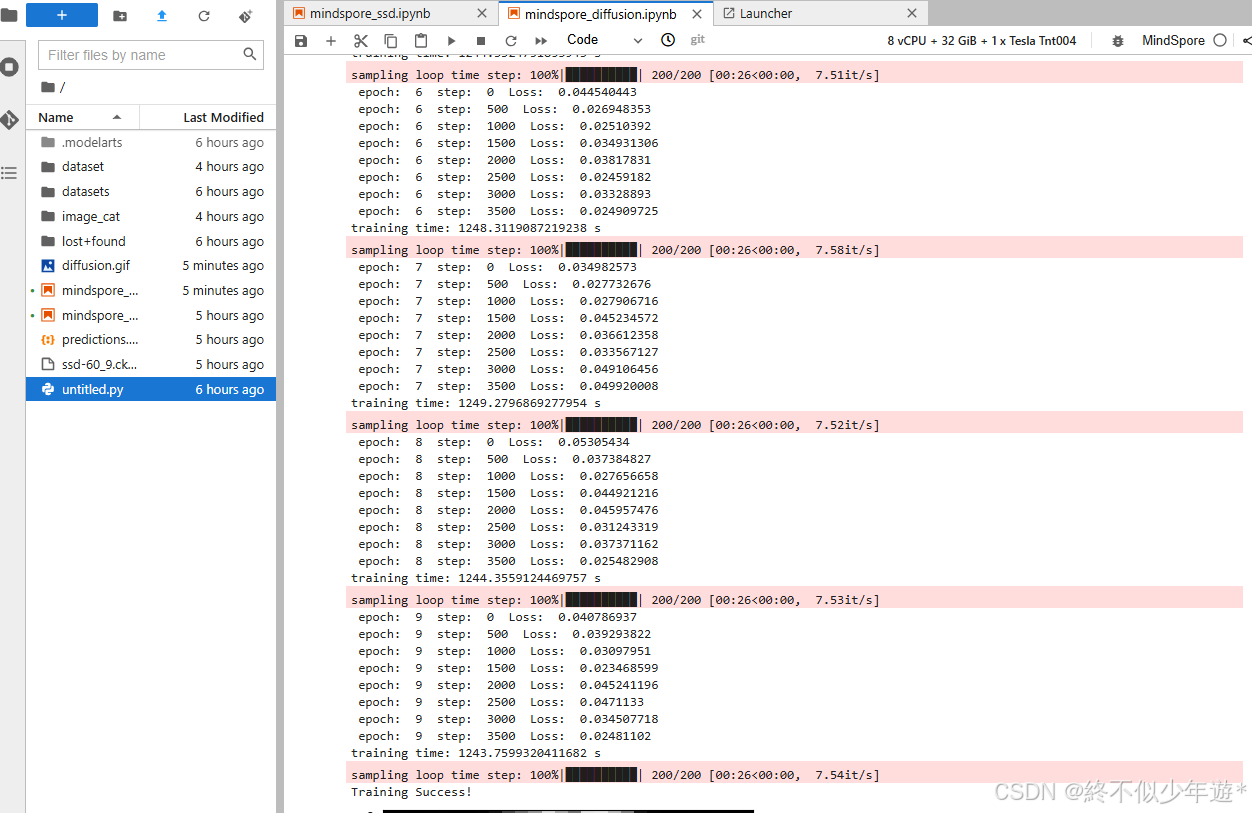
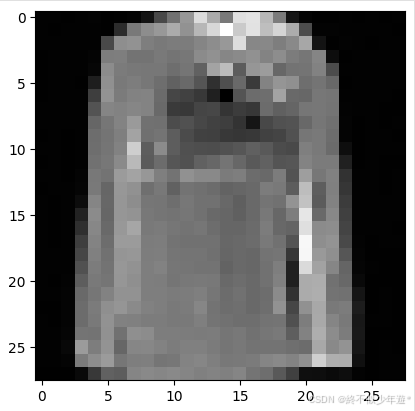
- 采样与生成:训练完成后,使用采样函数sample从模型中生成图像。通过逐步去噪,从纯噪声生成最终的图像样本。可以展示生成的图像样本,观察模型的生成效果。
生成的效果有些欠佳,可能是随机采样的原因,也可能是模型一些过拟合,需要进一步调整参数
五、遇到的问题及解决方法
- 环境配置问题:在ModelArts环境中安装MindSpore和依赖库时,可能会遇到版本兼容性问题。解决方法是仔细检查MindSpore和依赖库的版本要求,确保安装的版本相互兼容。可以通过查阅官方文档或社区论坛获取帮助。
- 训练时间过长:由于扩散模型需要多次正向传递来生成图像,训练过程可能相对较长。解决方法是合理配置计算资源,选择合适的GPU资源加速训练。同时,可以尝试减少训练数据集的大小或调整训练参数(如学习率、批次大小等),以缩短训练时间。
- 生成效果不佳:在训练过程中,可能会发现生成的图像样本质量不高或存在噪声。解决方法是仔细检查模型的结构和训练参数,确保模型能够正确学习逆向去噪过程。可以尝试调整网络结构、增加训练数据量、优化损失函数等方法来提高生成效果。
六、总结与展望
通过在华为云ModelArts上运行MindSpore扩散模型教程,我对扩散模型的原理和实现有了更深入的理解。扩散模型通过正向扩散和逆向去噪过程,能够生成具有一定质量的图像样本。在实践中,我掌握了MindSpore框架的基本使用方法,以及如何构建和训练扩散模型。同时,我也意识到扩散模型在生成效果和训练效率方面还存在一些挑战,如生成图像的多样性不足、训练时间较长等。
未来,我计划进一步探索扩散模型的改进方法,如引入更复杂的网络结构、优化训练策略等,以提高生成图像的质量和多样性。此外,我还想尝试将扩散模型应用于其他领域,如音频生成、视频生成等,探索其在不同领域的应用潜力。同时,我也会关注扩散模型的最新研究进展,学习和借鉴新的技术和方法,不断提升自己的技术水平。