OpenCorr是一个开源C++库,用于研究和开发数字图像相关(DIC)技术它提供了2D和3D-DIC以及数字体积相关(DVC)的功能模块。最近正在学习OpenCorr,为了更深层次地理解ICGN,我打算浅浅剖析Opencorr的代码,学习的过程中写下这篇学习笔记,以后忘记了还能回来看看。同时,作为一名在读研究生,希望能得到社区大佬的指点,以及跟同学们一起学习进步。
OpenCorr的github地址
https://github.com/vincentjzy/OpenCorr
想要学习交流的同学,在看这篇学习笔记之前,首先要看潘兵老师的论文
Fast, Robust and Accurate Digital Image Correlation Calculation Without Redundant Computations
然后我推荐大家最好再看这个博主对ICGN的理论推导,解释的非常通透。
https://blog.csdn.net/weixin_43560489/article/details/121708456?spm=1001.2014.3001.5506
一、源码和输入变量
在Opencorr中,简单四行就封装了整个icgn的复杂计算过程,其代码如下:
ICGN2D1* icgn1 = new ICGN2D1(subset_radius_x, subset_radius_y, max_deformation_norm, max_iteration, cpu_thread_number);
icgn1->setImages(ref_img, tar_img);
icgn1->prepare();
icgn1->compute(poi_queue);
其中subset_radius_x, subset_radius_y是人为设定的窗口半径
max_deformation_norm是最小的迭代距离,即Δp的模
max_iteration是最大的迭代步数,
小于最小距离或者最大步数就会终止程序输出结果。
介绍完输出参数,来看ICGN2D1 new了什么东西,其源码如下:
ICGN2D1::ICGN2D1(int subset_radius_x, int subset_radius_y, float conv_criterion, float stop_condition, int thread_number)
: ref_gradient(nullptr), tar_interp(nullptr)
{
this->subset_radius_x = subset_radius_x;
this->subset_radius_y = subset_radius_y;
this->conv_criterion = conv_criterion;
this->stop_condition = stop_condition;
this->thread_number = thread_number;
for (int i = 0; i < thread_number; i++)
{
ICGN2D1_* instance = ICGN2D1_::allocate(subset_radius_x, subset_radius_y);
instance_pool.push_back(instance);
}
}
可以看到就是初始化了一些参数,然后根据线程数量进行实例化。
由于allocate里面东西太多就不展开说了。
icgn1->setImages(ref_img, tar_img);这句就是导入原图。
二、prepare()
prepare源码如下:
void ICGN2D1::prepare()
{
prepareRef();
prepareTar();
}
prepareRef和prepareTar()虽然名字相近,但是要注意,这两个函数干了完全不同的事情。
首先是prepareRef():
void ICGN2D1::prepareRef()
{
if (ref_gradient != nullptr)
{
delete ref_gradient;
ref_gradient = nullptr;
}
ref_gradient = new Gradient2D4(*ref_img);
ref_gradient->getGradientX();
ref_gradient->getGradientY();
}
其功能是计算x和y方向的一阶导。再深入getGradientX和getGradientY中,看看Opencorr中是怎么计算梯度的。
void Gradient2D4::getGradientX()
{
int height = grad_img->height;
int width = grad_img->width;
gradient_x = Eigen::MatrixXf::Zero(height, width);
#pragma omp parallel for
for (int r = 0; r < height; r++)
{
for (int c = 2; c < width - 2; c++)
{
float result = 0.0f;
result -= grad_img->eg_mat(r, c + 2) / 12.f;
result += grad_img->eg_mat(r, c + 1) * (2.f / 3.f);
result -= grad_img->eg_mat(r, c - 1) * (2.f / 3.f);
result += grad_img->eg_mat(r, c - 2) / 12.f;
gradient_x(r, c) = result;
}
}
}
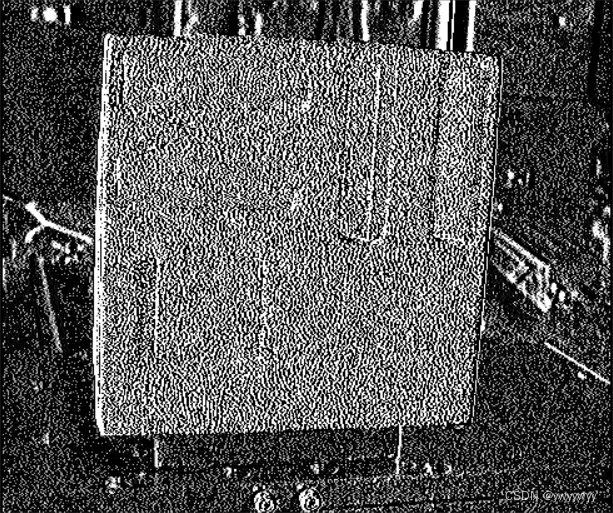
主要是看嵌套循环中干了什么事情。其实就是用一个一维梯度算子 1/12 * [-1, 8, 0, -8, 1]来计算X方向的梯度。笔者试验了其效果如下:
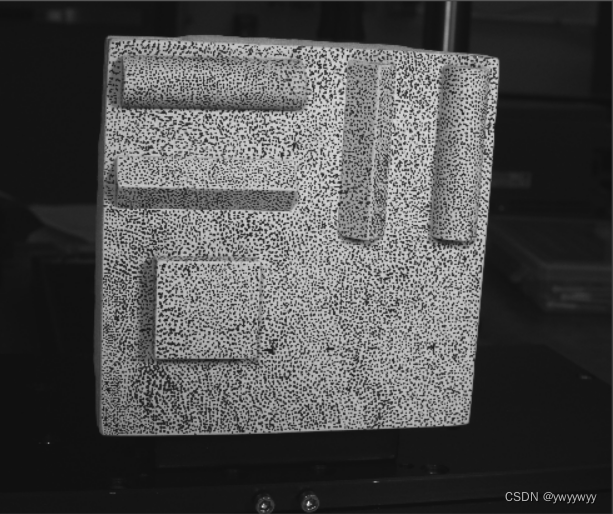
(a)原图 (b)x方向梯度
而getGadientY()是一样的,只是方向不同。
接下来轮到prepareTar(),其代码如下:
void ICGN2D1::prepareTar()
{
if (tar_interp != nullptr)
{
delete tar_interp;
tar_interp = nullptr;
}
tar_interp = new BicubicBspline(*tar_img);
tar_interp->prepare();
}
tar_interp->prepare()计算出全图中每个像素点的双三次B样条插值的4*4系数矩阵。
至此准备工作就完成了,可以开始计算。
三、compute()
以下是compute的整体代码,原版是全英文注解,其中有一些我看代码时候的注解,可以忽略。后面我将逐一拆解其中的代码片段,剖析ICGN的计算过程。
void ICGN2D1::compute(POI2D* poi)
{
//set instance w.r.t. thread id
ICGN2D1_* cur_instance = getInstance(omp_get_thread_num());
if (poi->y - subset_radius_y < 0 || poi->x - subset_radius_x < 0
|| poi->y + subset_radius_y > ref_img->height - 1 || poi->x + subset_radius_x > ref_img->width - 1
|| fabs(poi->deformation.u) >= ref_img->width || fabs(poi->deformation.v) >= ref_img->height
|| poi->result.zncc < 0 || std::isnan(poi->deformation.u) || std::isnan(poi->deformation.v))
{
poi->result.zncc = poi->result.zncc < -1 ? poi->result.zncc : -1;
}
else
{
int subset_width = 2 * subset_radius_x + 1;
int subset_height = 2 * subset_radius_y + 1;
//set reference subset
cur_instance->ref_subset->center = (Point2D)*poi;
cur_instance->ref_subset->fill(ref_img);
float ref_mean_norm = cur_instance->ref_subset->zeroMeanNorm();//返回 ∑^i_j √((x_ij - x_mean)^2) 即,ref_subset中所有元素减去平均数的平方并且开根号,最后全部加起来
//build the Hessian matrix
cur_instance->hessian.setZero();
for (int r = 0; r < subset_height; r++)
{
for (int c = 0; c < subset_width; c++)
{
int x_local = c - subset_radius_x;
int y_local = r - subset_radius_y;
int x_global = (int)poi->x + x_local;
int y_global = (int)poi->y + y_local;
float ref_gradient_x = ref_gradient->gradient_x(y_global, x_global);
float ref_gradient_y = ref_gradient->gradient_y(y_global, x_global);
cur_instance->sd_img[r][c][0] = ref_gradient_x;
cur_instance->sd_img[r][c][1] = ref_gradient_x * x_local;
cur_instance->sd_img[r][c][2] = ref_gradient_x * y_local;
cur_instance->sd_img[r][c][3] = ref_gradient_y;
cur_instance->sd_img[r][c][4] = ref_gradient_y * x_local;
cur_instance->sd_img[r][c][5] = ref_gradient_y * y_local;
for (int i = 0; i < 6; i++)
{
for (int j = 0; j < 6; j++)
{
cur_instance->hessian(i, j) += (cur_instance->sd_img[r][c][i] * cur_instance->sd_img[r][c][j]);
}
}
}
}
//calculate the inversed Hessian matrix
cur_instance->inv_hessian = cur_instance->hessian.inverse();
//set target subset
cur_instance->tar_subset->center = (Point2D)*poi;
//get initial guess
Deformation2D1 p_initial(poi->deformation.u, poi->deformation.ux, poi->deformation.uy,
poi->deformation.v, poi->deformation.vx, poi->deformation.vy);
//IC-GN iteration
int iteration_counter = 0; //initialize iteration counter
Deformation2D1 p_current, p_increment;
p_current.setDeformation(p_initial);
float dp_norm_max, znssd;
Point2D local_coor, warped_coor, global_coor;
do
{
iteration_counter++;
//reconstruct target subset
for (int r = 0; r < subset_height; r++)
{
for (int c = 0; c < subset_width; c++)
{
int x_local = c - subset_radius_x;
int y_local = r - subset_radius_y;
local_coor.x = x_local;
local_coor.y = y_local;
warped_coor = p_current.warp(local_coor);
global_coor = cur_instance->tar_subset->center + warped_coor;
cur_instance->tar_subset->eg_mat(r, c) = tar_interp->compute(global_coor);
}
}
float tar_mean_norm = cur_instance->tar_subset->zeroMeanNorm();
//calculate error image
cur_instance->error_img = cur_instance->tar_subset->eg_mat * (ref_mean_norm / tar_mean_norm)
- (cur_instance->ref_subset->eg_mat);
//calculate ZNSSD
znssd = cur_instance->error_img.squaredNorm() / (ref_mean_norm * ref_mean_norm);
//calculate numerator
float numerator[6] = { 0.f };
for (int r = 0; r < subset_height; r++)
{
for (int c = 0; c < subset_width; c++)
{
for (int i = 0; i < 6; i++)
{
numerator[i] += (cur_instance->sd_img[r][c][i] * cur_instance->error_img(r, c));
}
}
}
//calculate dp
float dp[6] = { 0.f };
for (int i = 0; i < 6; i++)
{
for (int j = 0; j < 6; j++)
{
dp[i] += (cur_instance->inv_hessian(i, j) * numerator[j]);
}
}
p_increment.setDeformation(dp);
//update warp
p_current.warp_matrix = p_current.warp_matrix * p_increment.warp_matrix.inverse();
//update p
p_current.setDeformation();
//check convergence
int subset_radius_x2 = subset_radius_x * subset_radius_x;
int subset_radius_y2 = subset_radius_y * subset_radius_y;
dp_norm_max = 0.f;
dp_norm_max += p_increment.u * p_increment.u;
dp_norm_max += p_increment.ux * p_increment.ux * subset_radius_x2;
dp_norm_max += p_increment.uy * p_increment.uy * subset_radius_y2;
dp_norm_max += p_increment.v * p_increment.v;
dp_norm_max += p_increment.vx * p_increment.vx * subset_radius_x2;
dp_norm_max += p_increment.vy * p_increment.vy * subset_radius_y2;
dp_norm_max = sqrt(dp_norm_max);
} while (iteration_counter < stop_condition && dp_norm_max >= conv_criterion);
//store the final result
poi->deformation.u = p_current.u;
poi->deformation.ux = p_current.ux;
poi->deformation.uy = p_current.uy;
poi->deformation.v = p_current.v;
poi->deformation.vx = p_current.vx;
poi->deformation.vy = p_current.vy;
//save the parameters for output
poi->result.u0 = p_initial.u;
poi->result.v0 = p_initial.v;
poi->result.zncc = 0.5f * (2 - znssd);
poi->result.iteration = (float)iteration_counter;
poi->result.convergence = dp_norm_max;
}
//check if the case of NaN occurs for ZNCC or displacments
if (std::isnan(poi->result.zncc) || std::isnan(poi->deformation.u) || std::isnan(poi->deformation.v))
{
poi->deformation.u = poi->result.u0;
poi->deformation.v = poi->result.v0;
poi->result.zncc = -5;
}
}
(1)首先看输入值,poi
其类型为POI2D,定义如下:
class POI2D : public Point2D
{
public:
DeformationVector2D deformation;
Result2D result;
StrainVector2D strain;
Point2D subset_radius;
POI2D(int x, int y);
POI2D(float x, float y);
POI2D(Point2D location);
~POI2D();
//reset data except the location
void clear();
};
其中,DeformationVector2D保存了x,y方向的位移及其各个方向的导数。
union DeformationVector2D
{
struct
{
float u, ux, uy, uxx, uxy, uyy;
float v, vx, vy, vxx, vxy, vyy;
};
float p[12]; //order: u ux uy uxx uxy uyy v vx vy vxx vxy vyy
};
Result2D保存了计算的结果
union Result2D
{
struct
{
float u0, v0, zncc, iteration, convergence, feature;
};
float r[6];
};
StrainVector2D 应变
union StrainVector2D
{
struct
{
float exx, eyy, exy;
};
float e[3]; //order: exx, eyy, exy
};
最后Point2D主要保存了x和y的坐标
class Point2D
{
public:
float x, y;
...//此处省略成员函数
}
(2)设置参考区域
int subset_width = 2 * subset_radius_x + 1;
int subset_height = 2 * subset_radius_y + 1;
//set reference subset
cur_instance->ref_subset->center = (Point2D)*poi;
cur_instance->ref_subset->fill(ref_img);
float ref_mean_norm = cur_instance->ref_subset->zeroMeanNorm();
这一部分初始化了参考区域,首先初始化了区域中心center
fill函数的实现如下,其实就是在原图中截取了subet_width * subset_height大小的block。
void Subset2D::fill(Image2D* image)
{
Point2D topleft_point(center.x - radius_x, center.y - radius_y);
eg_mat << image->eg_mat.block(topleft_point.y, topleft_point.x, height, width);
}
然后计算了一个zeroMeanNorm,实际就是
这里还是展示一下源码:
float Subset2D::zeroMeanNorm()
{
float subset_mean = eg_mat.mean();//求均值
eg_mat.array() -= subset_mean;//
float subset_sum = eg_mat.squaredNorm();
return sqrt(subset_sum);
}
(3)构建Hessian矩阵
在讲解代码之前,首先要了解Hessian矩阵,其定义见链接
http://t.csdn.cn/YiqBc
整体代码如下:
cur_instance->hessian.setZero();
for (int r = 0; r < subset_height; r++)
{
for (int c = 0; c < subset_width; c++)
{
int x_local = c - subset_radius_x;
int y_local = r - subset_radius_y;
int x_global = (int)poi->x + x_local;
int y_global = (int)poi->y + y_local;
float ref_gradient_x = ref_gradient->gradient_x(y_global, x_global);
float ref_gradient_y = ref_gradient->gradient_y(y_global, x_global);
cur_instance->sd_img[r][c][0] = ref_gradient_x;
cur_instance->sd_img[r][c][1] = ref_gradient_x * x_local;
cur_instance->sd_img[r][c][2] = ref_gradient_x * y_local;
cur_instance->sd_img[r][c][3] = ref_gradient_y;
cur_instance->sd_img[r][c][4] = ref_gradient_y * x_local;
cur_instance->sd_img[r][c][5] = ref_gradient_y * y_local;
for (int i = 0; i < 6; i++)
{
for (int j = 0; j < 6; j++)
{
cur_instance->hessian(i, j) += (cur_instance->sd_img[r][c][i] * cur_instance->sd_img[r][c][j]);
}
}
}
}
//calculate the inversed Hessian matrix
cur_instance->inv_hessian = cur_instance->hessian.inverse();
首先setZero初始化Hessian矩阵,其元素全为0。
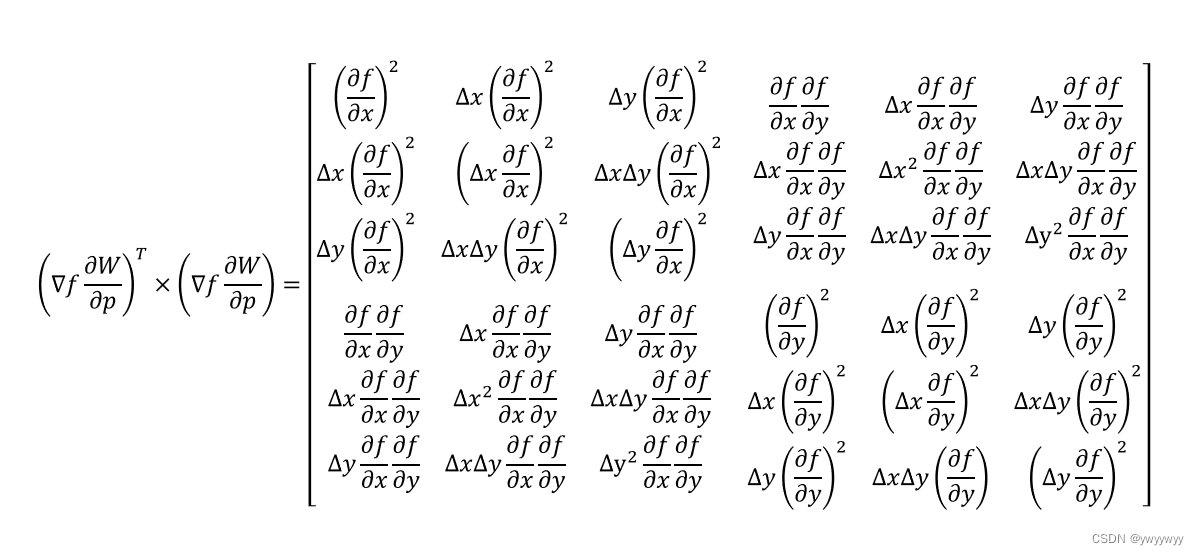
然后计算子集ref_subset的Hessian矩阵。这个地方的Hessian矩阵是6x6的,具体计算方式可以看原文。
其中,
上面这个公式,原文的解释是:ξ=(Δx, Δy, 1) ^T is the local coordinates of the pixel point in each subset。
可以解释为子集中所有点的局部坐标,对应代码中的x_local和y_local
即,Δx = x_local, Δy = y_local
具体推导过程就请各位去看原文了。
有了公式以后,代码就不难理解了。
首先计算:
于是,
最后还有一步求和工作,在代码中体现在这一段中



for (int i = 0; i < 6; i++)
{
for (int j = 0; j < 6; j++)
{
cur_instance->hessian(i, j) += (cur_instance->sd_img[r][c][i] * cur_instance->sd_img[r][c][j]);
}
}
求解Hessian矩阵这一段必须要配合原文才能看懂,所以对原文不熟悉的同学要先肝一下原文。
(4)ICGN迭代
在开始迭代之前,要先初始化。
首先是p向量的初始化

//get initial guess
Deformation2D1 p_initial(poi->deformation.u, poi->deformation.ux, poi->deformation.uy,
poi->deformation.v, poi->deformation.vx, poi->deformation.vy);
这里的初值是通过粗匹配获得的。
然后初始化迭代参数,
//IC-GN iteration
int iteration_counter = 0; //initialize iteration counter
Deformation2D1 p_current, p_increment;
p_current.setDeformation(p_initial);
float dp_norm_max, znssd;
Point2D local_coor, warped_coor, global_coor;
这里的iteration_counter记录了迭代次数。
Deformation2D1 p_current和p_increment代表着目前的p和Δp。其中,Δp如下。
在p_current.setDeformation(p_initial)中,
void Deformation2D1::setDeformation(Deformation2D1& another_deformation)
{
u = another_deformation.u;
ux = another_deformation.ux;
uy = another_deformation.uy;
v = another_deformation.v;
vx = another_deformation.vx;
vy = another_deformation.vy;
setWarp();
}
void Deformation2D1::setWarp()
{
warp_matrix(0, 0) = 1 + ux;
warp_matrix(0, 1) = uy;
warp_matrix(0, 2) = u;
warp_matrix(1, 0) = vx;
warp_matrix(1, 1) = 1 + vy;
warp_matrix(1, 2) = v;
warp_matrix(2, 0) = 0.f;
warp_matrix(2, 1) = 0.f;
warp_matrix(2, 2) = 1.f;
}
p_current被设置为p_initial,作为初始迭代向量。
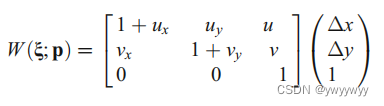
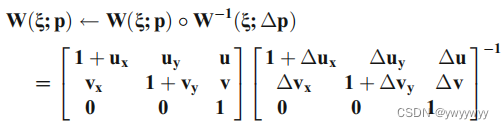
同时,setWarp()中设置了形变矩阵,如下图的左半部分
接下来是重头戏,迭代过程。其整体结构如下:
do
{
iteration_counter++;
//reconstruct target subset
......
//calculate error image
......
//calculate ZNSSD
.......
//calculate numerator
.......
//calculate dp
.......
//update warp
......
//update p
......
//check convergence
......
} while (iteration_counter < stop_condition && dp_norm_max >= conv_criterion);
在分析代码之前,还是要把整个ICGN匹配策略的过程搞懂。

下面将逐段解析源码,首先是reconstruct target subset
//reconstruct target subset
for (int r = 0; r < subset_height; r++)
{
for (int c = 0; c < subset_width; c++)
{
int x_local = c - subset_radius_x;
int y_local = r - subset_radius_y;
local_coor.x = x_local;
local_coor.y = y_local;
warped_coor = p_current.warp(local_coor);
global_coor = cur_instance->tar_subset->center + warped_coor;
cur_instance->tar_subset->eg_mat(r, c) = tar_interp->compute(global_coor);
}
}
float tar_mean_norm = cur_instance->tar_subset->zeroMeanNorm();
前面也说过,Δx = x_local, Δy = y_local,于是warped_coor通过warp()函数算出来。
warp()成员函数的定义如下:
Point2D Deformation2D1::warp(Point2D& location)
{
Eigen::Vector3f point_vector;
point_vector(0) = location.x;
point_vector(1) = location.y;
point_vector(2) = 1.f;
Eigen::Vector3f warped_vector = warp_matrix * point_vector;
Point2D new_location(warped_vector(0), warped_vector(1));
return new_location;
}
其中point_vector即[Δx, Δy, 1]^T,完全符合上面W(ξ; p)的公式右半部分。
得到W(ξ; p)后,还要更新该点的全局坐标global_coor。
global_coor = cur_instance->tar_subset->center + warped_coor;
然后,cur_instance->tar_subset->eg_mat(r, c) = tar_interp->compute(global_coor);
这句通过插值计算出tar_subset在形变以后的亚像素级的值。compute()不再展开。
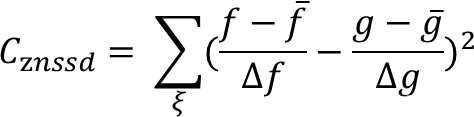
接下来是计算znssd,根据公式来计算ZNSSD
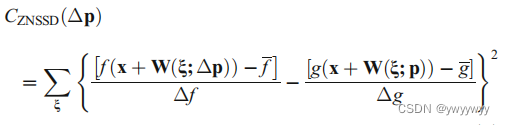
公式简化一下就是:
等式后面可以化简成下式:
把 
推导过程理清楚后,来看代码。
//calculate error image
cur_instance->error_img = cur_instance->tar_subset->eg_mat * (ref_mean_norm / tar_mean_norm)
- (cur_instance->ref_subset->eg_mat);
//calculate ZNSSD
znssd = cur_instance->error_img.squaredNorm() / (ref_mean_norm * ref_mean_norm);
第一条calculate error image计算的error_img,其实就是
再看第二条calculate ZNSSD,error_img.squaredNorm()计算的就是二范数的平方,而ref_mean_norm就是Δf。这样就对上简化后的公式了。
接下来要计算Δp了,calculate numerator也是为了calculate dp,代码中的dp就是Δp。
//calculate numerator
float numerator[6] = { 0.f };
for (int r = 0; r < subset_height; r++)
{
for (int c = 0; c < subset_width; c++)
{
for (int i = 0; i < 6; i++)
{
numerator[i] += (cur_instance->sd_img[r][c][i] * cur_instance->error_img(r, c));
}
}
}
//calculate dp
float dp[6] = { 0.f };
for (int i = 0; i < 6; i++)
{
for (int j = 0; j < 6; j++)
{
dp[i] += (cur_instance->inv_hessian(i, j) * numerator[j]);
}
}
p_increment.setDeformation(dp);
先看原文推导的公式。
其中的Hessian矩阵、都是已知的,numerator计算的就是Hessian矩阵后面一坨。
第二个X后面的部分简化一下,可以写成
我的理解是,由于ICGN的诸多假设,f和g的平均值相近可以约掉。再把Hessian矩阵前面的负号代入,就得到了上面提及的
于是,公式中所有的值都得到了,现在结合代码来看。
numerator[i] += (cur_instance->sd_img[r][c][i] * cur_instance->error_img(r, c));
这句其实就是
循环过程就是求和。

float dp[6] = { 0.f };
for (int i = 0; i < 6; i++)
{
for (int j = 0; j < 6; j++)
{
dp[i] += (cur_instance->inv_hessian(i, j) * numerator[j]);
}
}
这一段是Hessian矩阵乘以上面计算的结果。
至此,Δp就计算完成了。
得到Δp后,还要更新W和p
W的更新如下
//update warp
p_current.warp_matrix = p_current.warp_matrix * p_increment.warp_matrix.inverse();
是根据公式来计算的
最后更新一下p,计算一下Δp的模,如果Δp小于终止条件就停止运算,超过了规定的步数也停止计算。
最后输出结果:
//store the final result
poi->deformation.u = p_current.u;
poi->deformation.ux = p_current.ux;
poi->deformation.uy = p_current.uy;
poi->deformation.v = p_current.v;
poi->deformation.vx = p_current.vx;
poi->deformation.vy = p_current.vy;
//save the parameters for output
poi->result.u0 = p_initial.u;
poi->result.v0 = p_initial.v;
poi->result.zncc = 0.5f * (2 - znssd);
poi->result.iteration = (float)iteration_counter;
poi->result.convergence = dp_norm_max;
到这里,整个分析就结束了。这里面还有许多没有搞清楚的细节,希望大佬们能指出我的错误。同学们有问题可以跟我讨论一下,共同进步!