STM32 SPI接口使用总结:
一. 标准SPI波形
SPI协议与IIC不同,SPI的时钟极性与采样跳变沿是可以灵活设置的,时钟极性有两中情况,空闲状态时候CLK为高电平或者低电平;采样跳变沿也有两种情况,第一个边沿采样和第二个边沿采样,组合起来SPI的波形一共有四种情况。
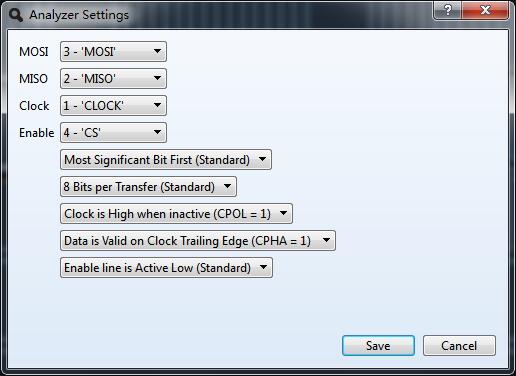
1.0下图是逻辑分析仪的SPI参数设置界面:
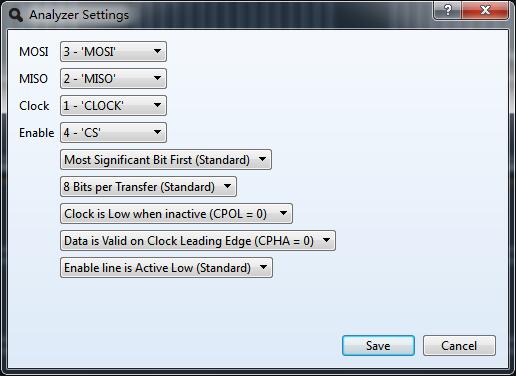
最上面4项是SPI四根数据线
第5项设置SPI数据的传输顺序,标准的是高位在前
第6项设置每次传输的位数,一般都是8位
第7项设置时钟的极性,这里先选择为空闲状态为低电压
第8项设置数据采样的边沿,这里先选择为第一个边沿采样
第9项设置CS引脚的有效电平,一般是低电平有效
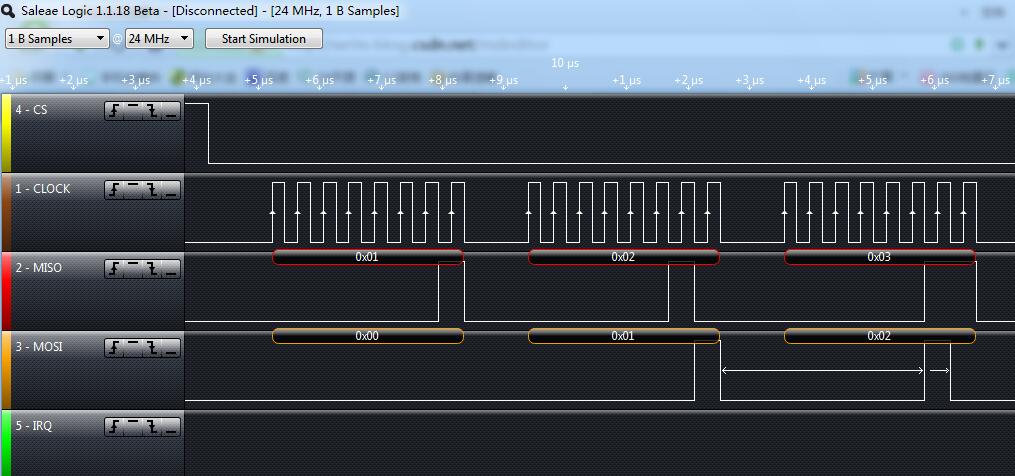
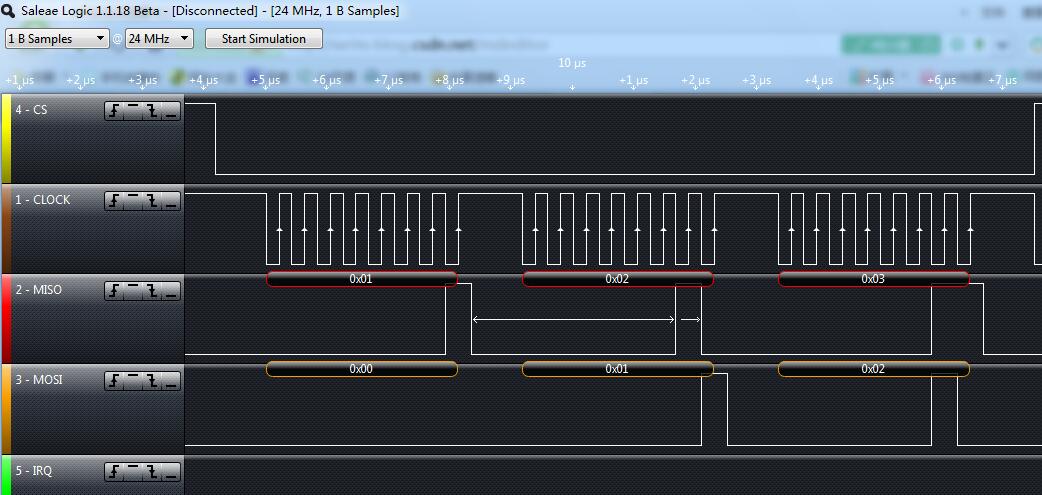
1.1下图是上述参数对应的波形图:
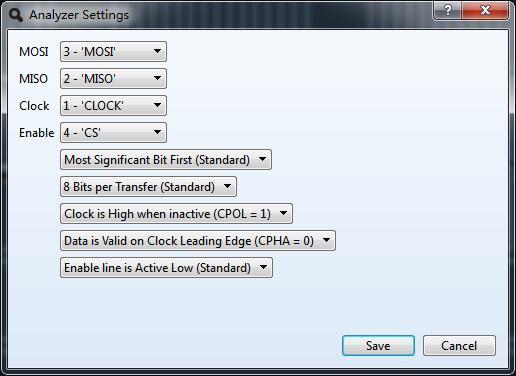
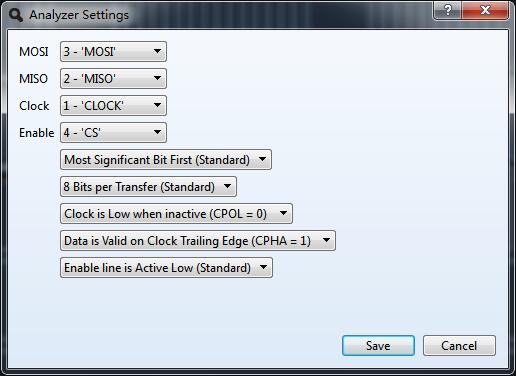
2.0下图是逻辑分析仪的SPI参数设置界面:
具体的参数含义见1.0描述,这里不在重复解释
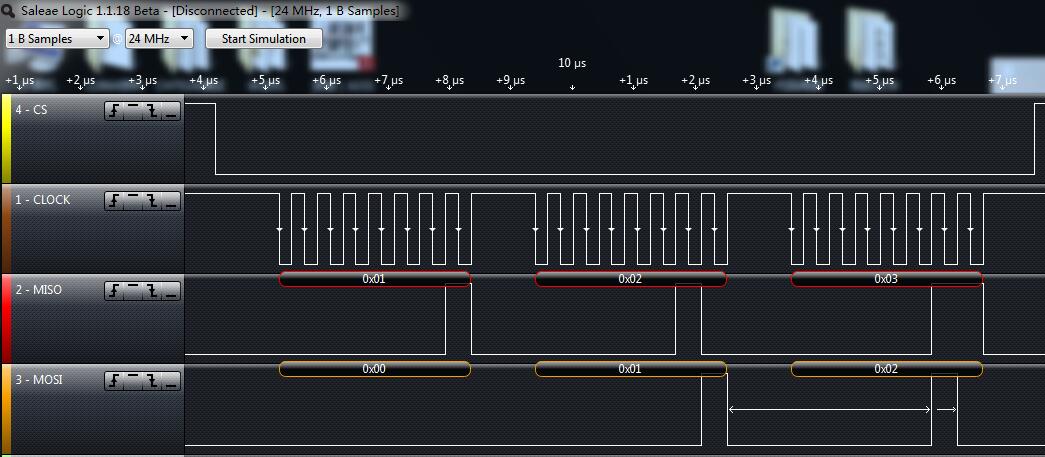
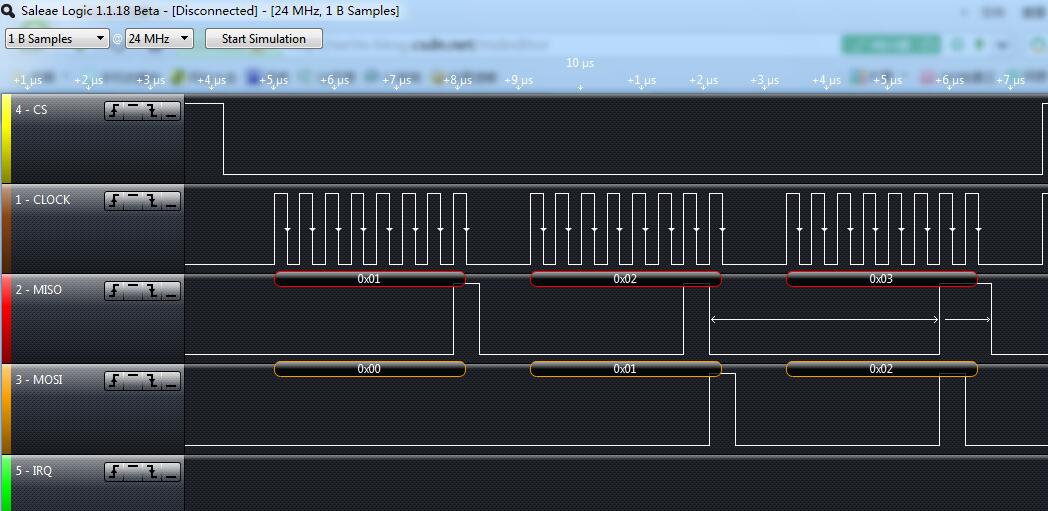
2.1下图是上述参数对应的波形图:
3.0下图是逻辑分析仪的SPI参数设置界面:
具体的参数含义见1.0描述,这里不在重复解释
3.1下图是上述参数对应的波形图:
4.0下图是逻辑分析仪的SPI参数设置界面:
具体的参数含义见1.0描述,这里不在重复解释
4.1下图是上述参数对应的波形图:
二. 模拟SPI
SPI代码如下:
// GPIOG_Pin_2 CS
static void Write_CS(uint8_t dat)
{
if(dat== 0)
{
GPIOG->BRR = GPIO_Pin_2;
}
else
{
GPIOG->BSRR = GPIO_Pin_2;
}
}
// GPIOG_Pin_3 MOSI
static void Write_MOSI(uint8_t dat)
{
if(dat== 0)
{
GPIOG->BRR = GPIO_Pin_3;
}
else
{
GPIOG->BSRR = GPIO_Pin_3;
}
}
// GPIOG_Pin_4 CLK
static void Write_CLK(uint8_t dat)
{
if(dat== 0)
{
GPIOG->BRR = GPIO_Pin_4;
}
else
{
GPIOG->BSRR = GPIO_Pin_4;
}
}
// GPIOG_Pin_5 MISO
static uint8_t Read_MISO(void)
{
uint8_t re_data;
re_data = GPIO_ReadInputDataBit(GPIOG,GPIO_Pin_5);
return re_data;
}
// 初始化GPIO
void hw_MCP2515_GPIO_Init()
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOG, ENABLE);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2 | GPIO_Pin_3 | GPIO_Pin_4;
GPIO_Init(GPIOG, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
GPIO_Init(GPIOG, &GPIO_InitStructure);
}
/***********************************************
* 函数名 : SPI_ReadByte
* 描述 : 通过SPI读取一个字节数据
* 输入 : 无
* 输出 : 无
* 返回值 : rByte(读取到的一个字节数据)
* 说明 : 无
***************************************************/
unsigned char SPI_ReadByte(void)
{
uint8_t i=0,rByte=0;
Write_CLK(0);
for(i=0;i<8;i++)
{
Write_CLK(1);
rByte<<=1;
rByte|=Read_MISO();
Write_CLK(0);
}
return rByte;
}
/***************************************************************
* 函数名 : SPI_SendByte
* 描述 : SPI发送一个字节数据
* 输入 : dt:待发送的数据
* 输出 : 无
* 返回值 : 无
* 说明 : 无
*****************************************************/
void SPI_SendByte(unsigned char dt)
{
uint8_t i=0;
for(i=0;i<8;i++)
{
Write_CLK(0);
if( (dt<<i ) & 0x80)
Write_MOSI(1);
else
Write_MOSI(0);
Write_CLK(1);
}
Write_CLK(0);
}
三. 硬件SPI
查阅STM32官方datasheet得到SPI最大速率为18Mhz,实测当设置为第二个时钟边沿采样时,速率可达18Mhz,与数据手册标称值一致,当设置为第一个时钟边沿采样时,最高速率只能达到9MHz,当配置为18MHz时输出数据不对!
硬件SPI配置代码如下:
// 初始化GPIO CS脚
void hw_MCP2515_GPIO_Init()
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOD, ENABLE);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8 ;
GPIO_Init(GPIOD, &GPIO_InitStructure);
GPIO_SetBits(GPIOD,GPIO_Pin_8);
SPI2_Init();
SPI2_SetSpeed(SPI_BaudRatePrescaler_2);
}
void SPI2_SetSpeed(u8 SPI_BaudRatePrescaler)
{
assert_param(IS_SPI_BAUDRATE_PRESCALER(SPI_BaudRatePrescaler));
SPI2->CR1&=0XFFC7;
SPI2->CR1|=SPI_BaudRatePrescaler; //设置SPI2速度
SPI_Cmd(SPI2,ENABLE);
}
//以下是SPI模块的初始化代码,配置成主机模式,访问SD Card/W25Q64/NRF24L01
//SPI口初始化
//这里针是对SPI2的初始化
void SPI2_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
SPI_InitTypeDef SPI_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB, ENABLE );//PORTB时钟使能
RCC_APB1PeriphClockCmd( RCC_APB1Periph_SPI2, ENABLE );//SPI2时钟使能
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13 | GPIO_Pin_14 | GPIO_Pin_15;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //PB13/14/15复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化GPIOB
GPIO_SetBits(GPIOB,GPIO_Pin_13|GPIO_Pin_14|GPIO_Pin_15); //PB13/14/15上拉
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //设置SPI单向或者双向的数据模式:SPI设置为双线双向全双工
SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //设置SPI工作模式:设置为主SPI
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //设置SPI的数据大小:SPI发送接收8位帧结构
SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low; //串行同步时钟的空闲状态为高电平
SPI_InitStructure.SPI_CPHA = SPI_CPHA_1Edge; //串行同步时钟的第二个跳变沿(上升或下降)数据被采样
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //NSS信号由硬件(NSS管脚)还是软件(使用SSI位)管理:内部NSS信号有SSI位控制
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_256; //定义波特率预分频的值:波特率预分频值为256
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //指定数据传输从MSB位还是LSB位开始:数据传输从MSB位开始
SPI_InitStructure.SPI_CRCPolynomial = 7; //CRC值计算的多项式
SPI_Init(SPI2, &SPI_InitStructure); //根据SPI_InitStruct中指定的参数初始化外设SPIx寄存器
SPI_Cmd(SPI2, ENABLE); //使能SPI外设
SPI2_ReadWriteByte(0xff);//启动传输
}
//SPIx 读写一个字节
//TxData:要写入的字节
//返回值:读取到的字节
u8 SPI2_ReadWriteByte(u8 TxData)
{
u8 retry=0;
while (SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_TXE) == RESET) //检查指定的SPI标志位设置与否:发送缓存空标志位
{
retry++;
if(retry>200)return 0;
}
SPI_I2S_SendData(SPI2, TxData); //通过外设SPIx发送一个数据
retry=0;
while (SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_RXNE) == RESET) //检查指定的SPI标志位设置与否:接受缓存非空标志位
{
retry++;
if(retry>200)return 0;
}
return SPI_I2S_ReceiveData(SPI2); //返回通过SPIx最近接收的数据
}STM32 硬件SPI时序设置为,第二个边沿采样时,最高速率可达18M,如果设置为第一个边沿采样,最高速度只能达到9M!
STM32 模拟SPI,受IO口翻转速率和程序执行速度的影响,最高只能达到1M左右!
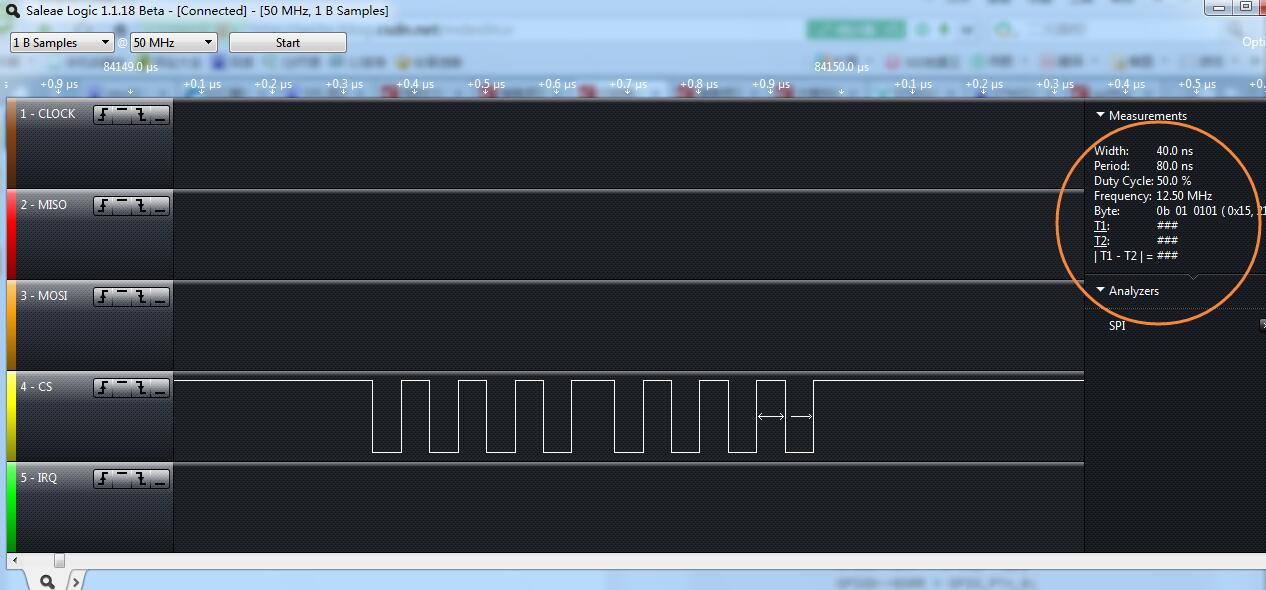
四.STM32 IO口反转速度测试
逻辑分析仪实测,IO口电压反转速度约为12MHz
测试代码如下:
while(1)
{
GPIOD->BRR = GPIO_Pin_8;
GPIOD->BSRR = GPIO_Pin_8;
GPIOD->BRR = GPIO_Pin_8;
GPIOD->BSRR = GPIO_Pin_8;
GPIOD->BRR = GPIO_Pin_8;
GPIOD->BSRR = GPIO_Pin_8;
GPIOD->BRR = GPIO_Pin_8;
GPIOD->BSRR = GPIO_Pin_8;
GPIOD->BRR = GPIO_Pin_8;
GPIOD->BSRR = GPIO_Pin_8;
GPIOD->BRR = GPIO_Pin_8;
GPIOD->BSRR = GPIO_Pin_8;
GPIOD->BRR = GPIO_Pin_8;
GPIOD->BSRR = GPIO_Pin_8;
GPIOD->BRR = GPIO_Pin_8;
GPIOD->BSRR = GPIO_Pin_8;
Delay_ms(1);
}逻辑分析仪波形如下:
由上述波形可见,模拟SPI速率的主要制约因素在程序的执行速率上!