介绍
在安防摄像头中,不仅仅涉及到固定摄像头的枪击,同样还包含可以360°转动的球机。因此对球机的云台方向控制是Onvif协议开发过程中必不可少的过程
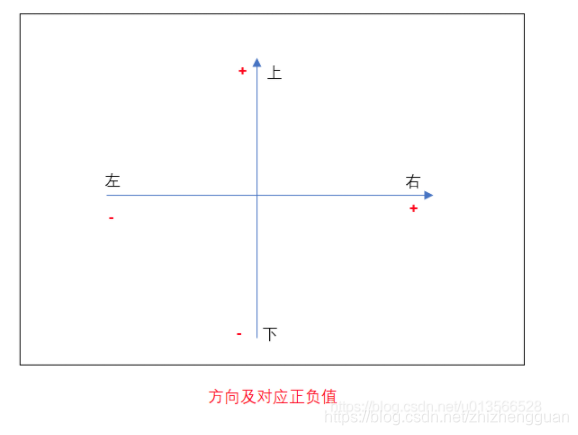
球机的云台控制主要包含:八个方向(上、下、左、右、左上、左下、右上、右下),放大、缩小等,这在个过程中还包含对转动速度的控制或者放大缩小的速度控制。对应的方向及正负值如下图:
编码流程
1、通过设备服务地址(形如http://xx/onvif/device_service),调用GetCapabilities函数接口,获取到Ptz的URL;
2、通过Ptz的URL,调用GetProfiles函数接口,获取到ProfileToken;
3、对_tptz__AbsoluteMove结构体进行填充;
4、调用soap_call___tptz__AbsoluteMove函数接口实现摄像头转动功能;
实践
除了onvif_head.sh修改为:
#!/bin/bash
mkdir onvif_head
cd onvif_head
../bin/wsdl2h -o onvif.h -s -d -x -t ../gsoap/WS/typemap.dat \
http://www.onvif.org/onvif/ver10/network/wsdl/remotediscovery.wsdl \
https://www.onvif.org/onvif/ver10/device/wsdl/devicemgmt.wsdl \
http://www.onvif.org/onvif/ver10/media/wsdl/media.wsdl \
http://www.onvif.org/onvif/ver20/ptz/wsdl/ptz.wsdl
main.cpp修改为:
#include <assert.h>
#include "soapH.h"
#include "wsdd.nsmap"
#include "soapStub.h"
#include "wsseapi.h"
#include "wsaapi.h"
#include <map>
#define SOAP_ASSERT assert
#define SOAP_DBGLOG printf
#define SOAP_DBGERR printf
#define SOAP_TO "urn:schemas-xmlsoap-org:ws:2005:04:discovery"
#define SOAP_ACTION "http://schemas.xmlsoap.org/ws/2005/04/discovery/Probe"
#define SOAP_MCAST_ADDR "soap.udp://239.255.255.250:3702" // onvif规定的组播地址
#define SOAP_ITEM "" // 寻找的设备范围
#define SOAP_TYPES "dn:NetworkVideoTransmitter" // 寻找的设备类型
#define SOAP_SOCK_TIMEOUT (10) // socket超时时间(单秒秒)
void soap_perror(struct soap *soap, const char *str)
{
if (nullptr == str) {
SOAP_DBGERR("[soap] error: %d, %s, %s\n", soap->error, *soap_faultcode(soap), *soap_faultstring(soap));
} else {
SOAP_DBGERR("[soap] %s error: %d, %s, %s\n", str, soap->error, *soap_faultcode(soap), *soap_faultstring(soap));
}
}
void* ONVIF_soap_malloc(struct soap *soap, unsigned int n)
{
void *p = nullptr;
if (n > 0) {
p = soap_malloc(soap, n);
SOAP_ASSERT(nullptr != p);
memset(p, 0x00 ,n);
}
return p;
}
struct soap *ONVIF_soap_new(int timeout)
{
struct soap *soap = nullptr; // soap环境变量
SOAP_ASSERT(nullptr != (soap = soap_new()));
soap_set_namespaces(soap, namespaces); // 设置soap的namespaces
soap->recv_timeout = timeout; // 设置超时(超过指定时间没有数据就退出)
soap->send_timeout = timeout;
soap->connect_timeout = timeout;
#if defined(__linux__) || defined(__linux) // 参考https://www.genivia.com/dev.html#client-c的修改:
soap->socket_flags = MSG_NOSIGNAL; // To prevent connection reset errors
#endif
soap_set_mode(soap, SOAP_C_UTFSTRING); // 设置为UTF-8编码,否则叠加中文OSD会乱码
return soap;
}
void ONVIF_soap_delete(struct soap *soap)
{
soap_destroy(soap); // remove deserialized class instances (C++ only)
soap_end(soap); // Clean up deserialized data (except class instances) and temporary data
soap_done(soap); // Reset, close communications, and remove callbacks
soap_free(soap); // Reset and deallocate the context created with soap_new or soap_copy
}
/************************************************************************
**函数:ONVIF_init_header
**功能:初始化soap描述消息头
**参数:
[in] soap - soap环境变量
**返回:无
**备注:
1). 在本函数内部通过ONVIF_soap_malloc分配的内存,将在ONVIF_soap_delete中被释放
************************************************************************/
void ONVIF_init_header(struct soap *soap)
{
struct SOAP_ENV__Header *header = nullptr;
SOAP_ASSERT(nullptr != soap);
header = (struct SOAP_ENV__Header *)ONVIF_soap_malloc(soap, sizeof(struct SOAP_ENV__Header));
soap_default_SOAP_ENV__Header(soap, header);
header->wsa__MessageID = (char*)soap_wsa_rand_uuid(soap);
header->wsa__To = (char*)ONVIF_soap_malloc(soap, strlen(SOAP_TO) + 1);
header->wsa__Action = (char*)ONVIF_soap_malloc(soap, strlen(SOAP_ACTION) + 1);
strcpy(header->wsa__To, SOAP_TO);
strcpy(header->wsa__Action, SOAP_ACTION);
soap->header = header;
}
/************************************************************************
**函数:ONVIF_init_ProbeType
**功能:初始化探测设备的范围和类型
**参数:
[in] soap - soap环境变量
[out] probe - 填充要探测的设备范围和类型
**返回:
0表明探测到,非0表明未探测到
**备注:
1). 在本函数内部通过ONVIF_soap_malloc分配的内存,将在ONVIF_soap_delete中被释放
************************************************************************/
void ONVIF_init_ProbeType(struct soap *soap, struct wsdd__ProbeType *probe)
{
struct wsdd__ScopesType *scope = nullptr; // 用于描述查找哪类的Web服务
SOAP_ASSERT(nullptr != soap);
SOAP_ASSERT(nullptr != probe);
scope = (struct wsdd__ScopesType *)ONVIF_soap_malloc(soap, sizeof(struct wsdd__ScopesType));
soap_default_wsdd__ScopesType(soap, scope); // 设置寻找设备的范围
scope->__item = (char*)ONVIF_soap_malloc(soap, strlen(SOAP_ITEM) + 1);
strcpy(scope->__item, SOAP_ITEM);
memset(probe, 0x00, sizeof(struct wsdd__ProbeType));
soap_default_wsdd__ProbeType(soap, probe);
probe->Scopes = scope;
probe->Types = (char*)ONVIF_soap_malloc(soap, strlen(SOAP_TYPES) + 1); // 设置寻找设备的类型
strcpy(probe->Types, SOAP_TYPES);
}
void ONVIF_DetectDevice(void (*cb)(char *DeviceXAddr))
{
int i;
int result = 0;
unsigned int count = 0; // 搜索到的设备个数
struct soap *soap = nullptr; // soap环境变量
struct wsdd__ProbeType req; // 用于发送Probe消息
struct __wsdd__ProbeMatches rep; // 用于接收Probe应答
struct wsdd__ProbeMatchType *probeMatch;
SOAP_ASSERT(nullptr != (soap = ONVIF_soap_new(SOAP_SOCK_TIMEOUT)));
ONVIF_init_header(soap); // 设置消息头描述
ONVIF_init_ProbeType(soap, &req); // 设置寻找的设备的范围和类型
result = soap_send___wsdd__Probe(soap, SOAP_MCAST_ADDR, nullptr, &req); // 向组播地址广播Probe消息
while (SOAP_OK == result) // 开始循环接收设备发送过来的消息
{
memset(&rep, 0x00, sizeof(rep));
result = soap_recv___wsdd__ProbeMatches(soap, &rep);
if (SOAP_OK == result) {
if (soap->error) {
soap_perror(soap, "ProbeMatches");
} else { // 成功接收到设备的应答消息
if (nullptr != rep.wsdd__ProbeMatches) {
count += rep.wsdd__ProbeMatches->__sizeProbeMatch;
for(i = 0; i < rep.wsdd__ProbeMatches->__sizeProbeMatch; i++) {
probeMatch = rep.wsdd__ProbeMatches->ProbeMatch + i;
if (nullptr != cb ) {
std::string url = probeMatch->XAddrs;
if(url == "http://192.168.0.116/onvif/device_service"){
cb(probeMatch->XAddrs); // 使用设备服务地址执行函数回调
}
}
}
}
}
} else if (soap->error) {
break;
}
}
SOAP_DBGLOG("\ndetect end! It has detected %d devices!\n", count);
if (nullptr != soap) {
ONVIF_soap_delete(soap);
}
}
#define SOAP_CHECK_ERROR(result, soap, str) \
do { \
if (SOAP_OK != (result) || SOAP_OK != (soap)->error) { \
soap_perror((soap), (str)); \
if (SOAP_OK == (result)) { \
(result) = (soap)->error; \
} \
goto EXIT; \
} \
} while (0)
/************************************************************************
**函数:ONVIF_SetAuthInfo
**功能:设置认证信息
**参数:
[in] soap - soap环境变量
[in] username - 用户名
[in] password - 密码
**返回:
0表明成功,非0表明失败
**备注:
************************************************************************/
static int ONVIF_SetAuthInfo(struct soap *soap, const char *username, const char *password)
{
int result = 0;
SOAP_ASSERT(nullptr != username);
SOAP_ASSERT(nullptr != password);
result = soap_wsse_add_UsernameTokenDigest(soap, nullptr, username, password);
SOAP_CHECK_ERROR(result, soap, "add_UsernameTokenDigest");
EXIT:
return result;
}
/************************************************************************
**函数:make_uri_withauth
**功能:构造带有认证信息的URI地址
**参数:
[in] src_uri - 未带认证信息的URI地址
[in] username - 用户名
[in] password - 密码
[out] dest_uri - 返回的带认证信息的URI地址
[in] size_dest_uri - dest_uri缓存大小
**返回:
0成功,非0失败
**备注:
1). 例子:
无认证信息的uri:rtsp://100.100.100.140:554/av0_0
带认证信息的uri:rtsp://username:[email protected]:554/av0_0
************************************************************************/
static int make_uri_withauth(const std::string& src_uri, const std::string&username, const std::string&password, std::string *dest_uri)
{
int result = 0;
SOAP_ASSERT(!src_uri.empty());
if (username.empty() &&password.empty()) { // 生成新的uri地址
*dest_uri = src_uri;
} else {
std::string::size_type position = src_uri.find("//");
if (std::string::npos == position) {
SOAP_DBGERR("can't found '//', src uri is: %s.\n", src_uri.c_str());
result = -1;
return result;
}
position += 2;
dest_uri->append(src_uri,0, position) ;
dest_uri->append(username + ":" + password + "@");
dest_uri->append(src_uri,position, std::string::npos) ;
}
return result;
}
#define USERNAME "admin"
#define PASSWORD "hik12345"
/************************************************************************
**函数:ONVIF_GetDeviceInformation
**功能:获取设备基本信息
**参数:
[in] DeviceXAddr - 设备服务地址
**返回:
0表明成功,非0表明失败
**备注:
************************************************************************/
int ONVIF_GetDeviceInformation(const char *DeviceXAddr)
{
int result = 0;
struct soap *soap = nullptr;
_tds__GetDeviceInformation devinfo_req;
_tds__GetDeviceInformationResponse devinfo_resp;
SOAP_ASSERT(nullptr != DeviceXAddr);
SOAP_ASSERT(nullptr != (soap = ONVIF_soap_new(SOAP_SOCK_TIMEOUT)));
ONVIF_SetAuthInfo(soap, USERNAME, PASSWORD);
result = soap_call___tds__GetDeviceInformation(soap, DeviceXAddr, nullptr, &devinfo_req, devinfo_resp);
SOAP_CHECK_ERROR(result, soap, "GetDeviceInformation");
std::cout << " Manufacturer:\t" << devinfo_resp.Manufacturer << "\n";
std::cout << " Model:\t" << devinfo_resp.Model << "\n";
std::cout << " FirmwareVersion:\t" << devinfo_resp.FirmwareVersion << "\n";
std::cout << " SerialNumber:\t" << devinfo_resp.SerialNumber << "\n";
std::cout << " HardwareId:\t" << devinfo_resp.HardwareId << "\n";
EXIT:
if (nullptr != soap) {
ONVIF_soap_delete(soap);
}
return result;
}
/************************************************************************
**函数:ONVIF_GetCapabilities
**功能:获取设备能力信息
**参数:
[in] DeviceXAddr - 设备服务地址
[in]
**返回:
0表明成功,非0表明失败
**备注:
1). 其中最主要的参数之一是媒体服务地址
************************************************************************/
int ONVIF_GetCapabilities(const std::string& deviceXAddr, std::string * ptzXAddr)
{
int result = 0;
struct soap *soap = nullptr;
_tds__GetCapabilities devinfo_req;
_tds__GetCapabilitiesResponse devinfo_resp;
SOAP_ASSERT(!deviceXAddr.empty());
SOAP_ASSERT(nullptr != (soap = ONVIF_soap_new(SOAP_SOCK_TIMEOUT)));
result = soap_call___tds__GetCapabilities(soap, deviceXAddr.c_str(), nullptr, &devinfo_req, devinfo_resp);
SOAP_CHECK_ERROR(result, soap, "GetCapabilities");
if(devinfo_resp.Capabilities->PTZ != nullptr){
*ptzXAddr = devinfo_resp.Capabilities->PTZ->XAddr;
}
EXIT:
if (nullptr != soap) {
ONVIF_soap_delete(soap);
}
return result;
}
int ONVIF_GetProfiles(const std::string& ptzXAddr, std::string * profilesToken)
{
int result = 0;
struct soap *soap = nullptr;
_trt__GetProfiles devinfo_req;
_trt__GetProfilesResponse devinfo_resp;
SOAP_ASSERT(!ptzXAddr.empty());
SOAP_ASSERT(nullptr != (soap = ONVIF_soap_new(SOAP_SOCK_TIMEOUT)));
ONVIF_SetAuthInfo(soap, USERNAME, PASSWORD);
result = soap_call___trt__GetProfiles(soap, ptzXAddr.c_str(), nullptr, &devinfo_req, devinfo_resp);
SOAP_CHECK_ERROR(result, soap, "ONVIF_GetProfiles");
SOAP_ASSERT(devinfo_resp.__sizeProfiles > 0);
*profilesToken = devinfo_resp.Profiles[0]->token;
EXIT:
if (nullptr != soap) {
ONVIF_soap_delete(soap);
}
return result;
}
/************************************************************************
**函数:ONVIF_GetSnapshotUri
**功能:获取设备图像抓拍地址(HTTP)
**参数:
[in] MediaXAddr - 媒体服务地址
[in] ProfileToken - the media profile token
[out] uri - 返回的地址
[in] sizeuri - 地址缓存大小
**返回:
0表明成功,非0表明失败
**备注:
1). 并非所有的ProfileToken都支持图像抓拍地址。举例:XXX品牌的IPC有如下三个配置profile0/profile1/TestMediaProfile,其中TestMediaProfile返回的图像抓拍地址就是空指针。
************************************************************************/
int ONVIF_GetSnapshotUri(const std::string& MediaXAddr, const std::string& ProfileToken, std::string * snapUri)
{
int result = 0;
struct soap *soap = nullptr;
_trt__GetSnapshotUri req;
_trt__GetSnapshotUriResponse rep;
SOAP_ASSERT(!MediaXAddr.empty() && !ProfileToken.empty());
SOAP_ASSERT(nullptr != (soap = ONVIF_soap_new(SOAP_SOCK_TIMEOUT)));
ONVIF_SetAuthInfo(soap, USERNAME, PASSWORD);
req.ProfileToken = const_cast<char *>(ProfileToken.c_str());
result = soap_call___trt__GetSnapshotUri(soap, MediaXAddr.c_str(), nullptr, &req, rep);
SOAP_CHECK_ERROR(result, soap, "GetSnapshotUri");
if (nullptr != rep.MediaUri && nullptr != rep.MediaUri->Uri) {
*snapUri = rep.MediaUri->Uri;
}
EXIT:
if (NULL != soap) {
ONVIF_soap_delete(soap);
}
return result;
}
// 获取当前ptz的位置以及状态
int ONVIF_PTZ_GetStatus(const std::string& ptzXAddr, const std::string& ProfileToken){
int result = 0;
struct soap *soap = nullptr;
_tptz__GetStatus getStatus;
_tptz__GetStatusResponse getStatusResponse;
SOAP_ASSERT(!ptzXAddr.empty());
SOAP_ASSERT(nullptr != (soap = ONVIF_soap_new(SOAP_SOCK_TIMEOUT)));
ONVIF_SetAuthInfo(soap, USERNAME, PASSWORD);
getStatus.ProfileToken = const_cast<char *>(ProfileToken.c_str());
result = soap_call___tptz__GetStatus(soap, ptzXAddr.c_str(), nullptr, &getStatus, getStatusResponse);
SOAP_CHECK_ERROR(result, soap, "ONVIF_PTZ_GetStatus");
if(*getStatusResponse.PTZStatus->MoveStatus->PanTilt == tt__MoveStatus__IDLE){
std::cout << " 空闲 ... " << std::endl;
}else if(*getStatusResponse.PTZStatus->MoveStatus->PanTilt == tt__MoveStatus__MOVING){
std::cout << " 移动中 ... " << std::endl;
}else if(*getStatusResponse.PTZStatus->MoveStatus->PanTilt == tt__MoveStatus__UNKNOWN){
std::cout << " 未知 ... " << std::endl;
}
std::cout << "当前p: " <<getStatusResponse.PTZStatus->Position->PanTilt->x << "\n";
std::cout << "当前t: " << getStatusResponse.PTZStatus->Position->PanTilt->y << "\n";
std::cout << "当前z: " << getStatusResponse.PTZStatus->Position->Zoom->x << "\n";
EXIT:
if (nullptr != soap) {
ONVIF_soap_delete(soap);
}
return 0;
}
// 以指定速度移动到指定位置的ptz
// p : -1 ~ 1 []
// t : -1 ~ 1
// z : 0 ~ 1
int ONVIF_PTZAbsoluteMove(const std::string& ptzXAddr, const std::string& ProfileToken){
int result = 0;
struct soap *soap = nullptr;
_tptz__AbsoluteMove absoluteMove;
_tptz__AbsoluteMoveResponse absoluteMoveResponse;
SOAP_ASSERT(!ptzXAddr.empty() && !ProfileToken.empty());
SOAP_ASSERT(nullptr != (soap = ONVIF_soap_new(SOAP_SOCK_TIMEOUT)));
ONVIF_SetAuthInfo(soap, USERNAME, PASSWORD);
absoluteMove.ProfileToken = const_cast<char *>(ProfileToken.c_str());
absoluteMove.Position = soap_new_tt__PTZVector(soap);
absoluteMove.Position->PanTilt = soap_new_tt__Vector2D(soap);
absoluteMove.Position->Zoom = soap_new_tt__Vector1D(soap);
absoluteMove.Speed = soap_new_tt__PTZSpeed(soap);
absoluteMove.Speed->PanTilt = soap_new_tt__Vector2D(soap);
absoluteMove.Speed->Zoom = soap_new_tt__Vector1D(soap);
absoluteMove.Position->PanTilt->x = 0.440833; // p
absoluteMove.Position->PanTilt->y = 0.583455; // t
absoluteMove.Position->Zoom->x = 0.0333333; // z
// x 和y的绝对值越接近1,表示云台的速度越快
absoluteMove.Speed->PanTilt->x = 0.5;
absoluteMove.Speed->PanTilt->y = 0.5;
absoluteMove.Speed->Zoom->x = 0.5;
result = soap_call___tptz__AbsoluteMove(soap,ptzXAddr.c_str(), nullptr,&absoluteMove,absoluteMoveResponse);
SOAP_CHECK_ERROR(result, soap, "ONVIF_PTZAbsoluteMove");
EXIT:
if (nullptr != soap) {
ONVIF_soap_delete(soap);
}
return 0;
}
int ONVIF_PTZStopMove(const std::string& ptzXAddr, const std::string& ProfileToken){
int result = 0;
struct soap *soap = nullptr;
_tptz__Stop tptzStop;
_tptz__StopResponse tptzStopResponse;
SOAP_ASSERT(!ptzXAddr.empty() && !ProfileToken.empty());
SOAP_ASSERT(nullptr != (soap = ONVIF_soap_new(SOAP_SOCK_TIMEOUT)));
ONVIF_SetAuthInfo(soap, USERNAME, PASSWORD);
tptzStop.ProfileToken = const_cast<char *>(ProfileToken.c_str());
result = soap_call___tptz__Stop(soap, ptzXAddr.c_str(), nullptr, &tptzStop, tptzStopResponse);
SOAP_CHECK_ERROR(result, soap, "ONVIF_PTZStopMove");
EXIT:
if (nullptr != soap) {
ONVIF_soap_delete(soap);
}
return result;
}
enum PTZCMD
{
PTZ_CMD_LEFT,
PTZ_CMD_RIGHT,
PTZ_CMD_UP,
PTZ_CMD_DOWN,
PTZ_CMD_LEFTUP,
PTZ_CMD_LEFTDOWN,
PTZ_CMD_RIGHTUP,
PTZ_CMD_RIGHTDOWN,
PTZ_CMD_ZOOM_IN,
PTZ_CMD_ZOOM_OUT,
};
// speed --> (0, 1]
int ONVIF_PTZContinuousMove(const std::string& ptzXAddr, const std::string& ProfileToken, enum PTZCMD cmd, float speed){
int result = 0;
struct soap *soap = nullptr;
_tptz__ContinuousMove continuousMove;
_tptz__ContinuousMoveResponse continuousMoveResponse;
SOAP_ASSERT(!ptzXAddr.empty() && !ProfileToken.empty());
SOAP_ASSERT(nullptr != (soap = ONVIF_soap_new(SOAP_SOCK_TIMEOUT)));
ONVIF_SetAuthInfo(soap, USERNAME, PASSWORD);
continuousMove.ProfileToken = const_cast<char *>(ProfileToken.c_str());
continuousMove.Velocity = soap_new_tt__PTZSpeed(soap);
continuousMove.Velocity->PanTilt = soap_new_tt__Vector2D(soap);
continuousMove.Velocity->Zoom = soap_new_tt__Vector1D(soap);
switch (cmd)
{
case PTZ_CMD_LEFT:
continuousMove.Velocity->PanTilt->x = -speed;
continuousMove.Velocity->PanTilt->y = 0;
break;
case PTZ_CMD_RIGHT:
continuousMove.Velocity->PanTilt->x = speed;
continuousMove.Velocity->PanTilt->y = 0;
break;
case PTZ_CMD_UP:
continuousMove.Velocity->PanTilt->x = 0;
continuousMove.Velocity->PanTilt->y = speed;
break;
case PTZ_CMD_DOWN:
continuousMove.Velocity->PanTilt->x = 0;
continuousMove.Velocity->PanTilt->y = -speed;
break;
case PTZ_CMD_LEFTUP:
continuousMove.Velocity->PanTilt->x = -speed;
continuousMove.Velocity->PanTilt->y = speed;
break;
case PTZ_CMD_LEFTDOWN:
continuousMove.Velocity->PanTilt->x = -speed;
continuousMove.Velocity->PanTilt->y = -speed;
break;
case PTZ_CMD_RIGHTUP:
continuousMove.Velocity->PanTilt->x = speed;
continuousMove.Velocity->PanTilt->y = speed;
break;
case PTZ_CMD_RIGHTDOWN:
continuousMove.Velocity->PanTilt->x = speed;
continuousMove.Velocity->PanTilt->y = -speed;
break;
case PTZ_CMD_ZOOM_IN:
continuousMove.Velocity->PanTilt->x = 0;
continuousMove.Velocity->PanTilt->y = 0;
continuousMove.Velocity->Zoom->x = speed;
break;
case PTZ_CMD_ZOOM_OUT:
continuousMove.Velocity->PanTilt->x = 0;
continuousMove.Velocity->PanTilt->y = 0;
continuousMove.Velocity->Zoom->x = -speed;
break;
default:
break;
}
// 也可以使用soap_call___tptz__RelativeMove实现
result = soap_call___tptz__ContinuousMove(soap,ptzXAddr.c_str(), nullptr,&continuousMove,continuousMoveResponse);
SOAP_CHECK_ERROR(result, soap, "ONVIF_PTZAbsoluteMove");
/* sleep(1); //如果当前soap被删除(或者发送stop指令),就会停止移动
ONVIF_PTZStopMove(ptzXAddr, ProfileToken);*/
EXIT:
if (nullptr != soap) {
ONVIF_soap_delete(soap);
}
return result;
}
void cb_discovery(char *deviceXAddr)
{
std::string ptzXAddr, profilesToken, snapUri, snapAuthUri;
ONVIF_GetCapabilities(deviceXAddr, &ptzXAddr);
ONVIF_GetProfiles(ptzXAddr, &profilesToken);
// ONVIF_PTZ_GetStatus(ptzXAddr, profilesToken);
// ONVIF_PTZAbsoluteMove(ptzXAddr, profilesToken);
ONVIF_PTZContinuousMove(ptzXAddr, profilesToken, PTZ_CMD_LEFTUP, 0.3);
}
int main(int argc, char **argv)
{
ONVIF_DetectDevice(cb_discovery);
return 0;
}
参考
Onvif协议客户端开发(8)–球机云台的控制
ONVIF PTZ云台控制–RelativeMove
初学小结使用Onvif协议进行PTZ控制
Onvif PTZ简介
使用Onvif协议进行设备PTZ云台控制
ONVIF PTZ控制