基于 CMAC(Cerebellar Model Articulation Controller)神经网络与 PID 的并行控制 是一种结合传统 PID 控制与 CMAC 神经网络智能控制的方法。通过两种控制方式的优势互补,适应复杂系统的非线性动态特性,同时确保控制的稳定性和快速性。
原理分析
-
PID 控制器
- 提供系统的基础控制,主要针对线性或简单的非线性系统,通过比例、积分和微分控制补偿误差。
- 对系统响应中的低频成分效果较好,但在强非线性或时变系统中性能可能受到限制。
-
CMAC 神经网络
- 模拟小脑功能,具有学习速度快、存储效率高的特点,适用于非线性、时变系统建模。
- 作为补偿控制器,用于处理系统中的复杂非线性成分和高频扰动。
-
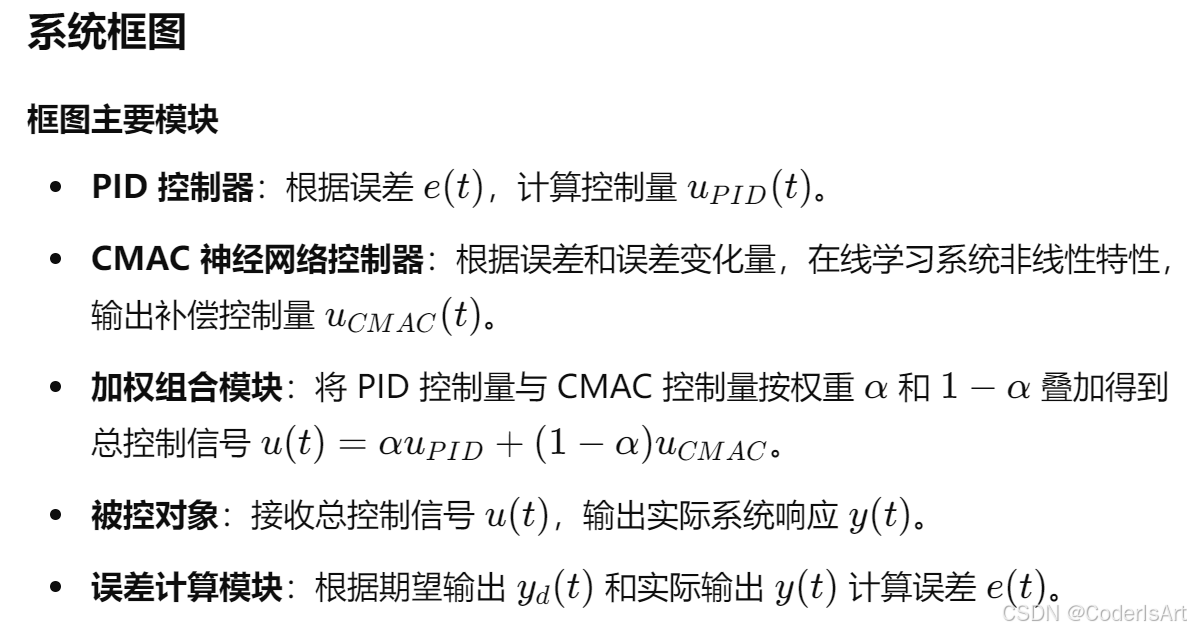
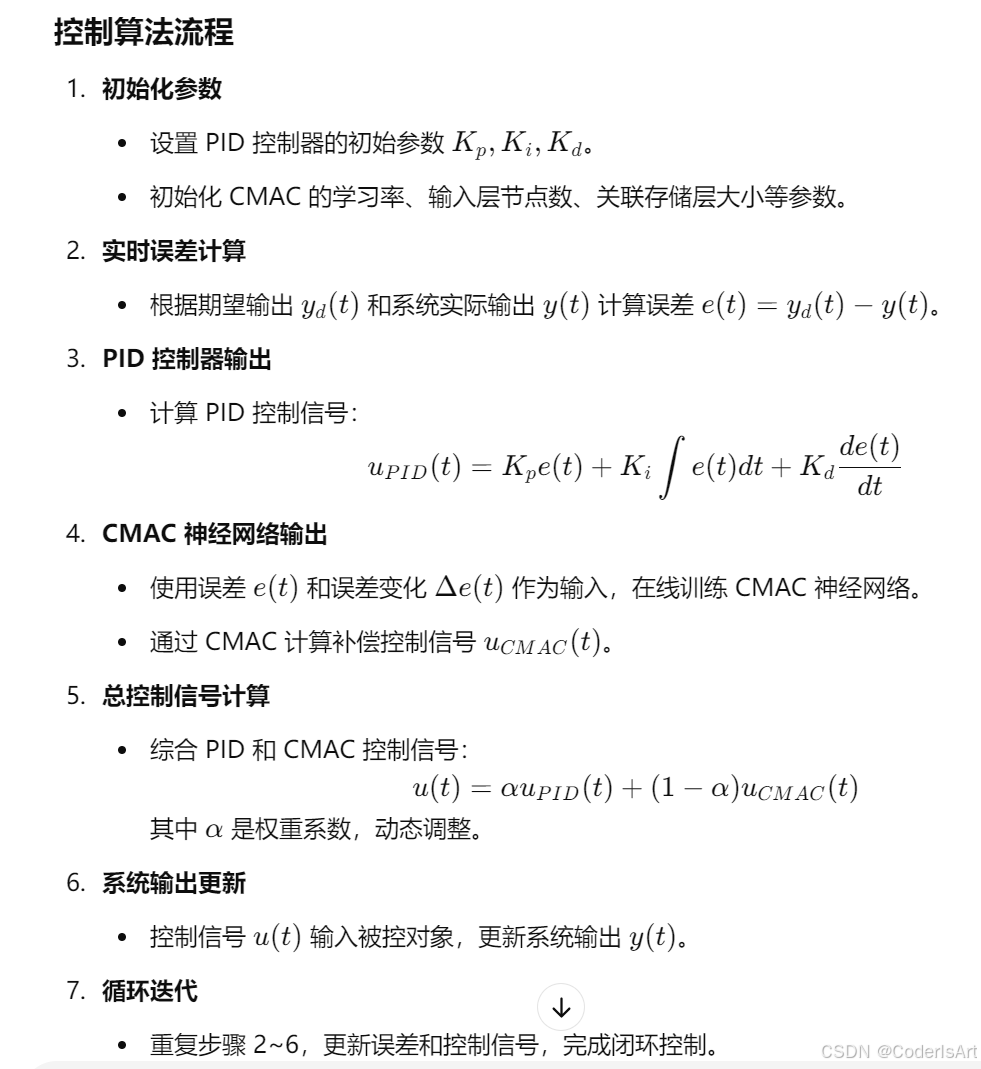
并行控制结构
- 并行模型将 PID 控制器和 CMAC 神经网络控制器输出叠加。
- PID 控制器负责主控制,CMAC 控制器通过学习动态特性提供误差补偿。
C++ 实现
以下为一个简化的基于 CMAC 与 PID 并行控制的离散系统实现代码:
#include <iostream>
#include <vector>
#include <cmath>
class CMAC {
private:
int input_size;
int memory_size;
double learning_rate;
std::vector<double> memory;
public:
CMAC(int input_size, int memory_size, double learning_rate = 0.01)
: input_size(input_size), memory_size(memory_size), learning_rate(learning_rate) {
memory.resize(memory_size, 0.0); // 初始化存储为 0
}
double compute(const std::vector<double>& inputs) {
// 简化的 CMAC 映射
int index = static_cast<int>(inputs[0] * (memory_size - 1)); // 映射到存储索引
return memory[index];
}
void update(const std::vector<double>& inputs, double error) {
int index = static_cast<int>(inputs[0] * (memory_size - 1));
memory[index] += learning_rate * error; // 学习误差,更新存储值
}
};
class ParallelPIDCMACController {
private:
double Kp, Ki, Kd;
CMAC cmac;
double alpha; // 权重
public:
ParallelPIDCMACController(double Kp, double Ki, double Kd, double alpha, int cmac_memory_size)
: Kp(Kp), Ki(Ki), Kd(Kd), alpha(alpha), cmac(1, cmac_memory_size) {}
double compute(double setpoint, double actual, double dt) {
static double integral = 0.0;
static double prev_error = 0.0;
// 计算误差
double error = setpoint - actual;
integral += error * dt;
double derivative = (error - prev_error) / dt;
// PID 控制信号
double u_pid = Kp * error + Ki * integral + Kd * derivative;
// CMAC 控制信号
std::vector<double> inputs = { error };
double u_cmac = cmac.compute(inputs);
// 综合控制信号
double u = alpha * u_pid + (1 - alpha) * u_cmac;
// 更新 CMAC
cmac.update(inputs, error);
prev_error = error;
return u;
}
};
int main() {
ParallelPIDCMACController controller(1.0, 0.5, 0.1, 0.7, 100);
double setpoint = 1.0; // 目标值
double actual = 0.0; // 实际值
double dt = 0.1; // 时间步长
for (int step = 0; step < 100; ++step) {
double control_signal = controller.compute(setpoint, actual, dt);
actual += control_signal * 0.1; // 简化的被控对象模型
std::cout << "Step: " << step
<< ", Control Signal: " << control_signal
<< ", Actual Output: " << actual
<< std::endl;
}
return 0;
}
特点与优势
-
快速学习能力
- CMAC 学习速度快,适合动态调整系统控制策略。
-
非线性补偿
- PID 控制器提供基础控制,CMAC 补偿非线性特性,提高系统适应性。
-
稳定性与灵活性
- PID 确保控制稳定性,CMAC 提供灵活的补偿策略。
总结
基于 CMAC 与 PID 的并行控制通过两种方法的优势互补,可适应复杂、非线性系统。该方法在工业控制、机器人控制等场景中表现出色,尤其是在系统动态特性较强的情况下,有助于提高控制性能和响应速度。