1. 基本原理
DRNN(Dynamic Recurrent Neural Network, 动态递归神经网络)是一种带有时间反馈的神经网络,能够建模系统的动态特性,适用于非线性、多变量、时变系统的控制。结合 PID 解耦控制,利用 DRNN 进行动态建模和在线参数整定,可以实现精确的多变量解耦控制。
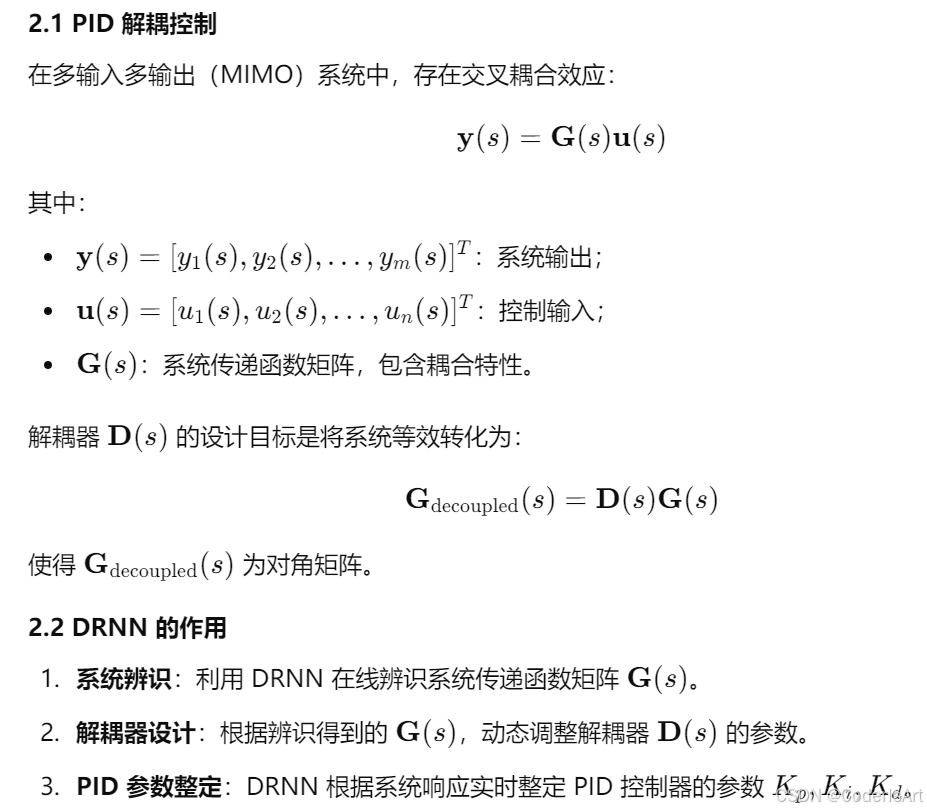
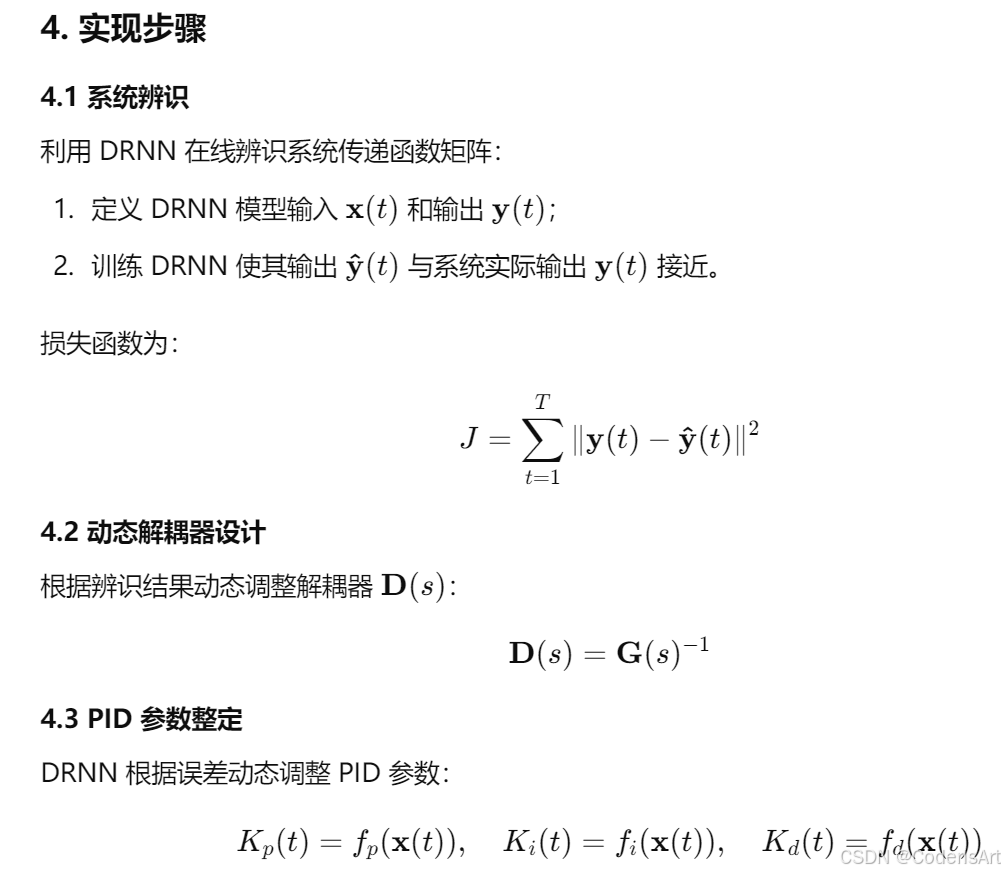
2. 方法原理


5. C++ 实现
5.1 DRNN 模型
#include <iostream>
#include <vector>
#include <cmath>
#include <Eigen/Dense>
using namespace std;
using namespace Eigen;
class DRNN {
private:
MatrixXd Wx, Wy; // 权值矩阵
VectorXd b; // 偏置
VectorXd state; // 状态变量
double learningRate;
public:
DRNN(int inputSize, int outputSize, double lr)
: Wx(MatrixXd::Random(outputSize, inputSize)),
Wy(MatrixXd::Random(outputSize, outputSize)),
b(VectorXd::Random(outputSize)),
state(VectorXd::Zero(outputSize)),
learningRate(lr) {}
// 前向计算
VectorXd forward(const VectorXd& input) {
state = tanh(Wx * input + Wy * state + b);
return state;
}
// 训练更新
void train(const VectorXd& input, const VectorXd& target) {
VectorXd output = forward(input);
VectorXd error = target - output;
// 更新权值
Wx += learningRate * error * input.transpose();
Wy += learningRate * error * state.transpose();
b += learningRate * error;
}
};
5.2 PID 控制器
class PID {
private:
double Kp, Ki, Kd;
double prevError, integral;
public:
PID(double initKp, double initKi, double initKd)
: Kp(initKp), Ki(initKi), Kd(initKd), prevError(0.0), integral(0.0) {}
void updateGains(double newKp, double newKi, double newKd) {
Kp = newKp;
Ki = newKi;
Kd = newKd;
}
double compute(double error, double dt) {
integral += error * dt;
double derivative = (error - prevError) / dt;
prevError = error;
return Kp * error + Ki * integral + Kd * derivative;
}
};
5.3 主程序
int main() {
// 初始化 DRNN
DRNN drnn(2, 2, 0.01);
// 初始化解耦器
MatrixXd G(2, 2);
G << 2.0, 0.5,
0.3, 1.0;
MatrixXd D = G.inverse();
// 初始化 PID 控制器
PID pid1(1.0, 0.1, 0.01);
PID pid2(1.0, 0.1, 0.01);
// 输入和输出
VectorXd input(2), output(2), setpoint(2);
setpoint << 1.0, 0.5;
input.setZero();
output.setZero();
double dt = 0.1;
for (int t = 0; t < 100; ++t) {
// DRNN 预测
VectorXd predictedOutput = drnn.forward(input);
// 解耦误差
VectorXd error = setpoint - predictedOutput;
VectorXd decoupledError = D * error;
// 更新 PID 参数
pid1.updateGains(1.0 + 0.1 * error[0], 0.1, 0.01);
pid2.updateGains(1.0 + 0.1 * error[1], 0.1, 0.01);
// 计算控制输入
input[0] = pid1.compute(decoupledError[0], dt);
input[1] = pid2.compute(decoupledError[1], dt);
// 系统输出模拟
output = G * input;
// DRNN 训练
drnn.train(input, output);
cout << "Time: " << t * dt << ", Output: " << output.transpose() << endl;
}
return 0;
}
6. 应用场景
- 化工过程控制:复杂的多变量耦合系统;
- 机器人运动控制:机械臂多自由度解耦控制;
- 能源管理:风力发电多变量动态解耦;
- 飞行控制:飞行器姿态解耦控制。
7. 总结
- 优点:
- DRNN 具有在线辨识和动态调整能力,适应复杂时变系统;
- 解耦与 PID 整定结合,提高了系统鲁棒性和响应速度。
- 挑战:
- DRNN 的训练复杂度较高;
- 解耦器设计依赖系统建模精度。