1. GRU 模型架构
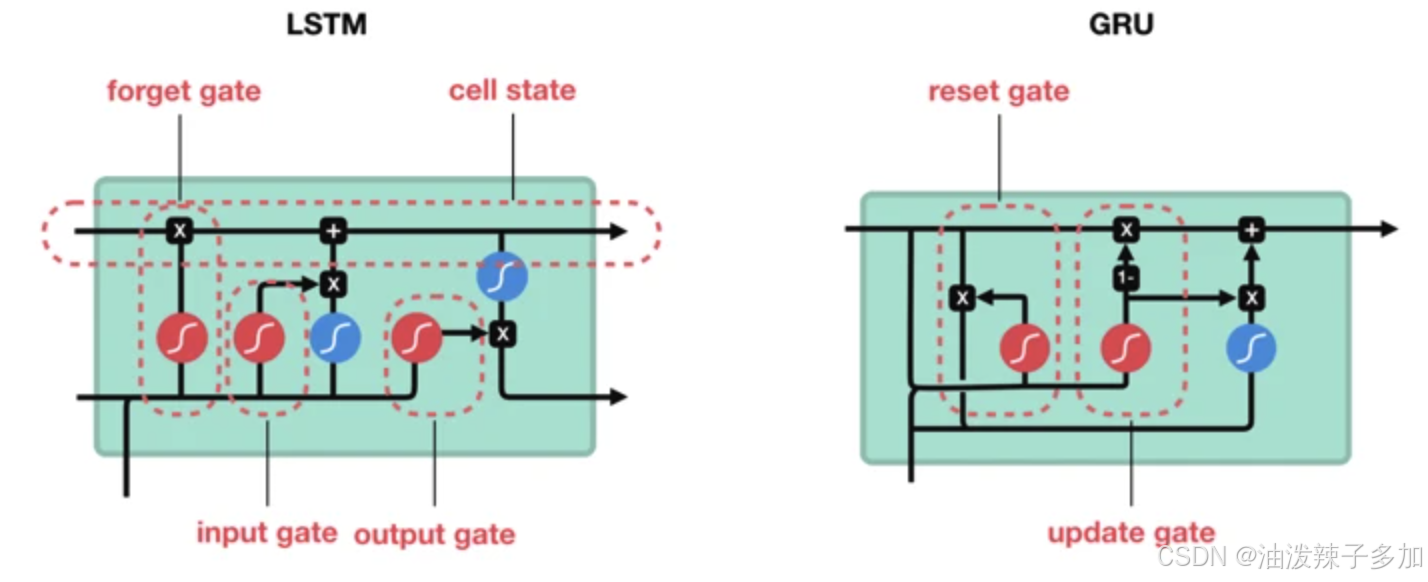
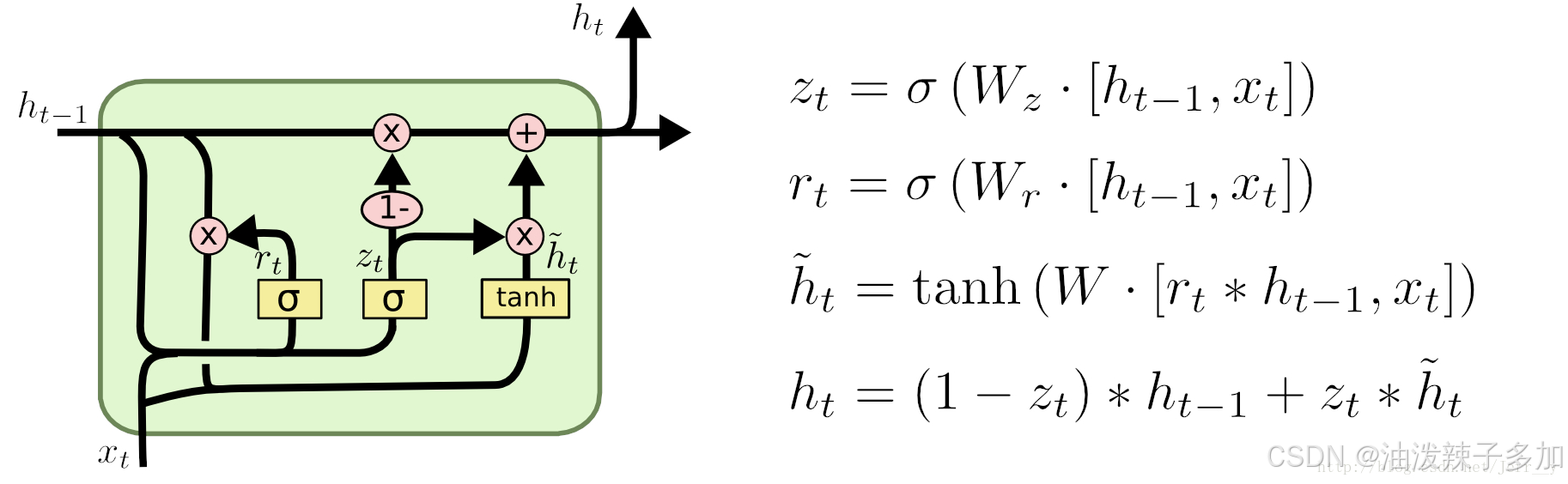
GRU 模型包含两个主要的门控机制:更新门(Update Gate)和重置门(Reset Gate)。其计算过程如下:
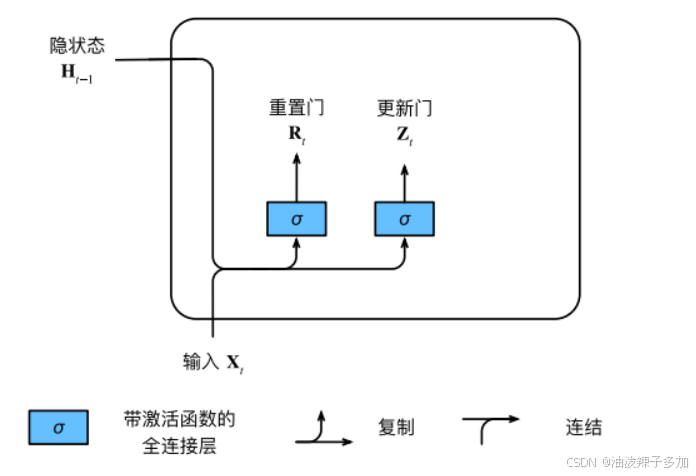
1.1 重置门:
决定当前隐藏状态与之前隐藏状态的相关程度。它通过一个 Sigmoid 函数输出一个范围在 [0, 1] 之间的值,表示当前时间步要忘记多少之前的信息。
r
t
=
σ
(
W
r
⋅
[
h
t
−
1
,
x
t
]
+
b
r
)
rt = \sigma(W_r \cdot [h_{t-1}, x_t] + b_r)
rt=σ(Wr⋅[ht−1,xt]+br)
其中:
- r t r_t rt是重置门的输出;
- h t − 1 h_{t-1} ht−1 是上一时刻的隐藏状态;
- x t x_t xt 是当前时刻的输入;
- σ \sigma σ 是 Sigmoid 激活函数。
1.2 更新门:
控制当前时间步的隐藏状态更新的程度。它的输出也是一个 [0, 1] 之间的值,决定当前时刻的信息有多少来自于之前的状态。
z
t
=
σ
(
W
z
⋅
[
h
t
−
1
,
x
t
]
+
b
z
)
zt= \sigma(W_z \cdot [h_{t-1}, x_t] + b_z)
zt=σ(Wz⋅[ht−1,xt]+bz)
其中:
-
z
t
z_t
zt 是更新门的输出。
1.3 候选隐藏状态:
计算当前时刻的候选隐藏状态,候选状态结合了当前输入和重置门的影响。
h
t
~
=
tanh
(
W
h
⋅
[
r
t
⊙
h
t
−
1
,
x
t
]
+
b
h
)
\tilde{h_t}= \tanh(W_h \cdot [r_t \odot h_{t-1}, x_t] + b_h)
ht~=tanh(Wh⋅[rt⊙ht−1,xt]+bh)
其中:
- h t ~ \tilde{h_t} ht~ 是候选隐藏状态;
-
⊙
\odot
⊙ 表示按元素相乘,
tanh
\tanh
tanh 是双曲正切激活函数。
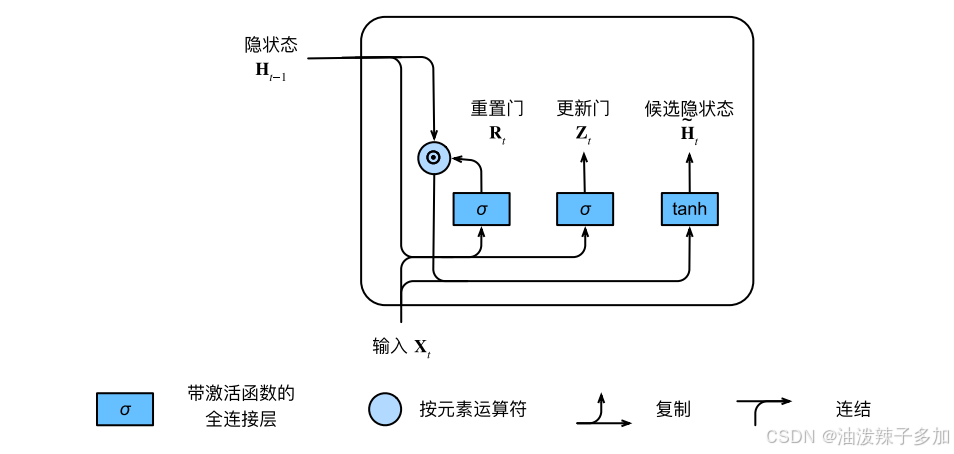
1.4 最终隐藏状态:
根据更新门的值和上一时刻的隐藏状态与当前时刻的候选隐藏状态,最终计算出当前的隐藏状态。
h t = ( 1 − z t ) ⊙ h t − 1 + z t ⊙ h t ~ h_t= (1 - z_t) \odot h_{t-1} + z_t \odot \tilde{h_t} ht=(1−zt)⊙ht−1+zt⊙ht~
2. Pytorch 实现
import torch
import torch.nn as nn
import torch.optim as optim
import torch.nn.functional as F
from sklearn.metrics import mean_squared_error
from torch.utils.data import DataLoader, TensorDataset
import matplotlib.pyplot as plt
# 定义GRU模型类
class GRU(nn.Module):
def __init__(self, input_size, hidden_size, num_layers, forecast_horizon):
super(GRU, self).__init__()
self.num_layers = num_layers
self.input_size = input_size
self.hidden_size = hidden_size
self.forecast_horizon = forecast_horizon
# GRU层
self.gru = nn.GRU(input_size=self.input_size, hidden_size=self.hidden_size,
num_layers=self.num_layers, batch_first=True)
# 全连接层1
self.fc1 = nn.Linear(self.hidden_size, 20)
# 全连接层2
self.fc2 = nn.Linear(20, self.forecast_horizon)
# Dropout层,用于防止过拟合
self.dropout = nn.Dropout(0.2)
def forward(self, x):
# 初始化隐藏状态并确保其在GPU上
h_0 = torch.randn(self.num_layers, x.size(0), self.hidden_size).to(device)
# 通过GRU层进行前向传播
out, _ = self.gru(x, h_0)
# 通过全连接层和激活函数
out = F.relu(self.fc1(out[:, -1, :])) # 只取最后一个时间步的输出
out = self.fc2(out) # 输出层
return out
# 设置设备,使用GPU(如果可用)
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
print(f'Using device: {device}')
# 将数据转换为torch tensors,并转移到设备(GPU/CPU)
X_train_tensor = torch.Tensor(X_train).to(device)
X_test_tensor = torch.Tensor(X_test).to(device)
y_train_tensor = torch.Tensor(y_train).squeeze(-1).to(device)
y_test_tensor = torch.Tensor(y_test).squeeze(-1).to(device)
# 创建训练数据和验证数据集
train_dataset = TensorDataset(X_train_tensor, y_train_tensor)
test_dataset = TensorDataset(X_test_tensor, y_test_tensor)
# 定义 DataLoader
batch_size = 512
train_loader = DataLoader(train_dataset, batch_size=batch_size, shuffle=True)
test_loader = DataLoader(test_dataset, batch_size=batch_size, shuffle=False)
# 初始化RNN模型
input_size = X_train.shape[2] # 特征数量
hidden_size = 64 # 隐藏层神经元数量
num_layers = 2 # RNN层数
forecast_horizon = 5 # 预测的目标步数
model = GRU(input_size, hidden_size, num_layers, forecast_horizon).to(device)
def train_model_with_dataloader(model, train_loader, test_loader, epochs=50, lr=0.001):
# 定义损失函数和优化器
criterion = nn.MSELoss()
optimizer = optim.Adam(model.parameters(), lr=lr)
train_loss = []
val_loss = []
for epoch in range(epochs):
# 训练阶段
model.train()
epoch_train_loss = 0
for X_batch, y_batch in train_loader:
optimizer.zero_grad()
# 前向传播
output_train = model(X_batch)
# 计算损失
loss = criterion(output_train, y_batch)
loss.backward() # 反向传播
optimizer.step() # 更新参数
epoch_train_loss += loss.item() # 累计批次损失
train_loss.append(epoch_train_loss / len(train_loader)) # 计算平均损失
# 验证阶段
model.eval()
epoch_val_loss = 0
with torch.no_grad():
for X_batch, y_batch in test_loader:
output_val = model(X_batch)
loss = criterion(output_val, y_batch)
epoch_val_loss += loss.item()
val_loss.append(epoch_val_loss / len(test_loader)) # 计算平均验证损失
# 打印日志
if (epoch + 1) % 100 == 0:
print(f'Epoch [{epoch+1}/{epochs}], Train Loss: {train_loss[-1]:.4f}, Validation Loss: {val_loss[-1]:.4f}')
# 绘制训练损失和验证损失曲线
plt.plot(train_loss, label='Train Loss')
plt.plot(val_loss, label='Validation Loss')
plt.title('Loss vs Epochs')
plt.xlabel('Epochs')
plt.ylabel('Loss')
plt.legend()
plt.show()
def evaluate_model_with_dataloader(model, test_loader):
model.eval()
y_pred_list = []
y_test_list = []
with torch.no_grad():
for X_batch, y_batch in test_loader:
y_pred = model(X_batch)
y_pred_list.append(y_pred.cpu().numpy())
y_test_list.append(y_batch.cpu().numpy())
# 将所有批次结果拼接
y_pred_rescaled = np.concatenate(y_pred_list, axis=0)
y_test_rescaled = np.concatenate(y_test_list, axis=0)
# 计算均方误差
mse = mean_squared_error(y_test_rescaled, y_pred_rescaled)
print(f'Mean Squared Error: {mse:.4f}')
return y_pred_rescaled, y_test_rescaled
# 训练模型
train_model_with_dataloader(model, train_loader, test_loader, epochs=2000)
# 评估模型性能
y_pred_rescaled, y_test_rescaled = evaluate_model_with_dataloader(model, test_loader)
# 保存模型
def save_model(model, path='./model_files/multistep_gru_model.pth'):
torch.save(model.state_dict(), path)
print(f'Model saved to {path}')
# 保存训练好的模型
save_model(model)
1.代码解析
(1)验证loss
model.eval()
with torch.no_grad():
output_val = model(X_test)
val_loss_value = criterion(output_val, y_test)
val_loss.append(val_loss_value.item())
model.eval()将模型设置为评估模式,调用eval()方法会禁用Dropout 和 Batch Normalization- Dropout:在训练时会随机丢弃一部分神经元,以避免过拟合,但在评估时,我们需要使用整个网络来进行推理。
- Batch Normalization:在训练时会计算每个小批量的均值和方差来进行标准化,而在评估时会使用在训练时计算得到的总体均值和方差。
torch.no_grad()是一个上下文管理器,用于在该代码块内禁用梯度计算。通常在推理阶段,模型的参数不再更新,因此不需要计算梯度,这可以节省内存和加速推理;val_loss_value.item()提取损失值val_loss_value的数值部分,将其转换为 Python 的标量类型(float),因为val_loss_value是一个包含梯度信息的张量;val_loss.append(...)将每个批次(或每个 epoch)计算得到的损失值追加到val_loss列表中,用于记录每次验证的损失,可以用于后续的性能分析和绘制损失曲线;
3. GRU 的优缺点
3.1 优点
- 较少的参数:GRU 比 LSTM 更简单,参数较少,计算效率更高。
- 较快的训练速度:GRU 的门结构较简单,因此训练时间比 LSTM 更短。
- 长距离依赖建模:GRU 能够有效地捕捉时间序列数据中的长距离依赖,解决传统 RNN 的梯度消失问题。
3.2 缺点
- 性能不如 LSTM:在一些复杂任务中,LSTM 可能比 GRU 更强大,尤其是在处理更复杂的时间序列任务时。
- 较少的控制:GRU 只有两个门(与 LSTM 的三个门相比),可能在某些情况下缺乏足够的灵活性。
4. GRU 的算法变种
- Bi-GRU (双向 GRU):双向 GRU 同时在正向和反向传播序列信息,增强了模型的表现。
- Attention-based GRU:结合注意力机制,使得模型可以更加关注输入序列中重要的部分,提升序列建模能力。
- Deep GRU:通过堆叠多个 GRU 层来构建更深的模型,增加模型的学习能力。
5. GRU 的特点
- 简洁高效:GRU 相比 LSTM 更简洁,计算效率更高,尤其在内存受限的环境中更具优势。
- 强大的时间序列建模能力:能够捕捉时间序列中的长期依赖,适合需要时序特征学习的任务。
- 灵活性:可以与其他网络架构(如卷积神经网络、Transformer 等)结合使用,提升模型表现。
6. 应用场景
- 时间序列预测:如股市、气象、交通流量等数据的预测。
- 自然语言处理:如机器翻译、语音识别、情感分析等。
- 视频分析:如视频中的动作识别、视频分类等任务。
- 序列标注任务:如命名实体识别(NER)、词性标注(POS)、语音识别中的声学建模等。