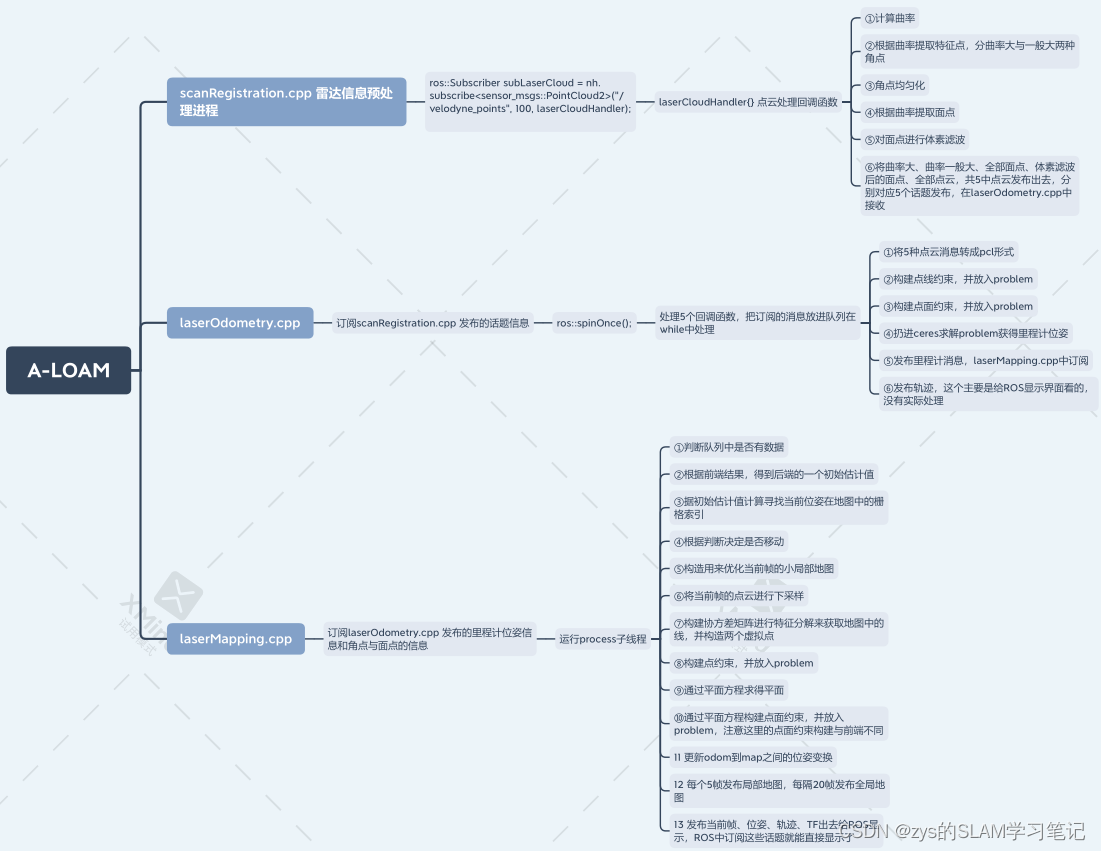
A-LOAM的整体流程框图如下:算法主要就是这3个cpp文件
scanRegistration.cpp
对应的算法细节讲解在A-LOAM(前端-1)的特征提取及均匀化-算法流程+代码注释
和A-LOAM(前端-2)异常点的剔除-算法流程+代码注释
laserOdometry.cpp
对应的算法细节讲解在A-LOAM(前端-3)的雷达畸变及运动补偿-算法流程+代码注释
和A-LOAM(前端-4)的帧间lidar里程计-算法流程+代码注释
laserMapping.cpp
对应的算法细节讲解在A-LOAM(后端1)基于栅格点云地图构建-算法流程+代码注释
和A-LOAM(后端2)地图中的线面特征提取及优化问题构建-算法流程+代码注释
坐标系间关系不懂的可以参考关于ROS中map、odom、base_link三个坐标系的理解