一、简介
串口通信(Serial Communications)的概念非常简单,串口按位(bit)发送和接收字节的通信方式。串口是一种可以将接收来自CPU的并行数据字符转换为连续的串行数据流发送出去,同时可将接收的串行数据流转换为并行的数据字符供给CPU的器件。
USART:(Universal Synchronous/Asynchronous Receiver/Transmitter)通用同步/异步串行接收/发送器。USART是一个全双工通用同步/异步串行收发模块,该接口是一个高度灵活的串行通信设备。
二、串口通信接口标准
1.RS232
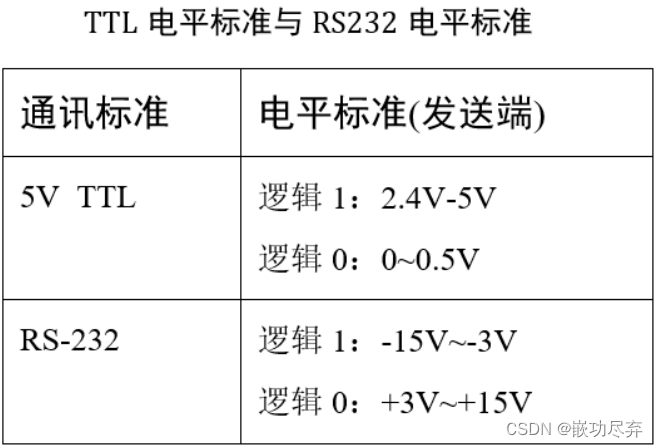
RS-232标准接口(又称EIA RS-232)是常用的串行通信接口标准之一,该标准规定采用25脚的DB-25连接器,并且对连接器的每个引脚信号的内容和电平都做了规定。其规定逻辑“1”的电平为-5V~-15 V,逻辑“0”的电平为+5 V~+15 V。选用该电气标准的目的在于提高抗干扰能力,增大通信距离。RS -232的噪声容限为2V,接收器将能识别高至+3V的信号作为逻辑“0”,将低到-3 V的信号作为逻辑“1”。
后来,IBM公司生产的PC将RS232简化成了9脚的DB-9连接器,并随着PC的流行而成为事实上的标准。DB-25与DB-9连接器对比如下图。

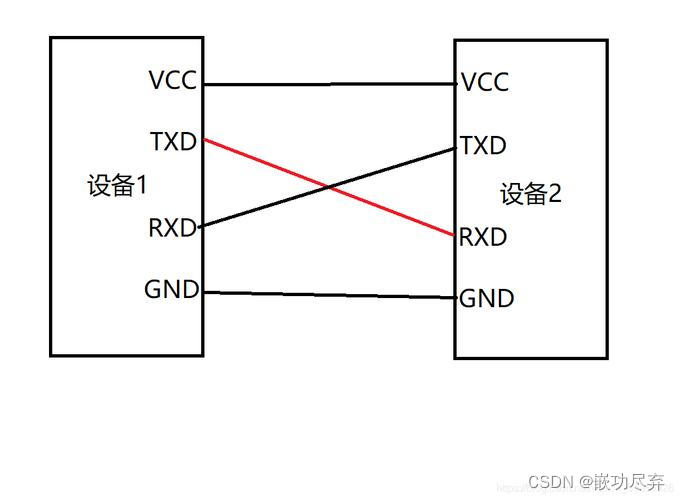
DB-9信号线说明
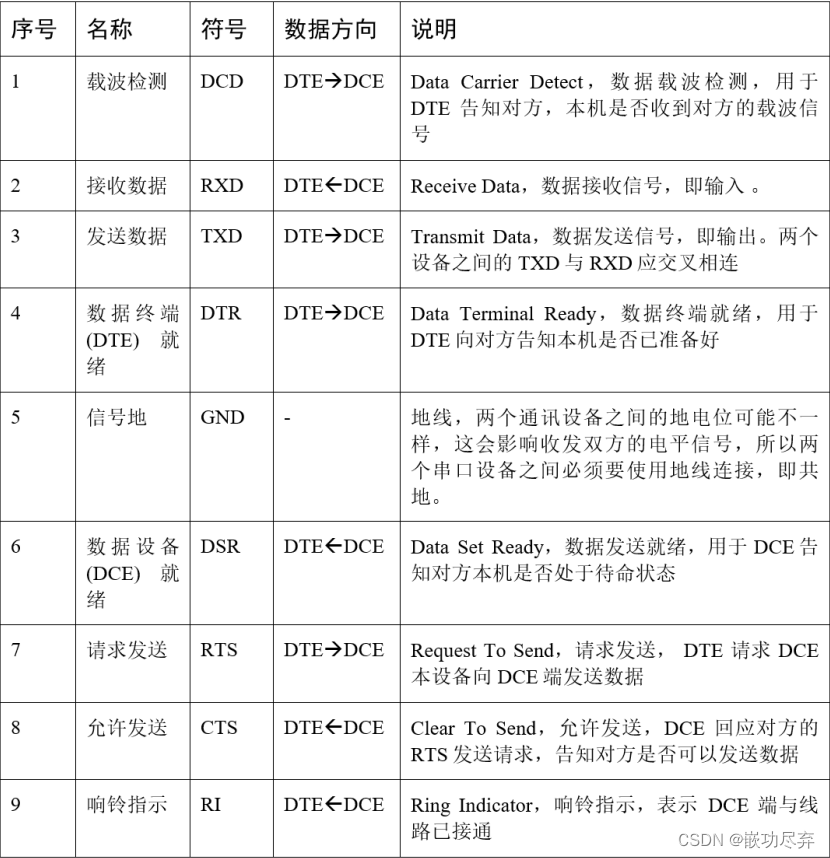
在目前的其它工业控制使用的串口通讯中,一般只使用 RXD、TXD 、 GND三条信号线,直接传输数据信号,而 RTS、CTS、DSR、DTR 及 DCD 信号都被裁剪掉了。
并且常见的电子电路中常使用 TTL 的电平标准。
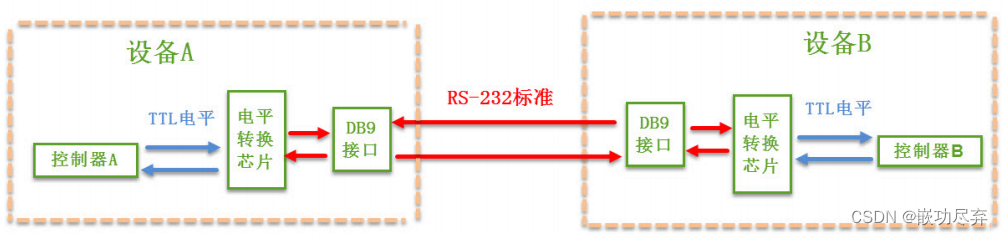
RS232接口标准由于出现较早,因此在使用时存在以下不足:
(1)接口信号电平值较高,易损坏接口电路的驱动芯片
(2)传输速率较低,异步传输时最大传输速率为20kbit/s
(3)信号线采用共地的传输形式,容易产生共模干扰,所以抗干扰性能弱
(4)传输距离有限
(5)只允许两个节点,不具体多点通信能力
针对RS232的不足,一些新的串行接口标准应运而生,RS485就是其中应用较为广泛的一种。
2.RS485
RS485接口标准是差分信号进行数据传输,具有较强的抗干扰能力,支持多个节点和远距离通信,数据接收灵敏性也较高。RS485接口采用平衡驱动器和差分接收器组合,因此具有抑制共模干扰的能力。同时,RS485总线收接发器具有较高的灵敏度,能检测低至200mV的电压,故信号传输距离可达上千米。RS485串行通信主要特点如下:
(1)当信号间的电压差为+2 ~ +6V时,表示逻辑1;当信号间的电压差为-6 ~ -2V时,表示逻辑0.由此可见RS485接口信号的电平比RS232低,因而不容易损坏接口电路的驱动芯片,且电平与TTL电平兼容。
(2)数据的最高传输速率为10Mbit/s。
(3)抗共模干扰能力强,抗噪声音性好。
(4)最大传输距离约1200m,通过继电器可达3000m左右。
(5)RS485采用半双工的通信方式,连接线采用总线型拓扑结构,允许在总线上连接多个收发器,具有多点通信能力。一般情况下允许32个节点,特制的RS485驱动芯片采用128或256个节点。
三、协议层
串口通讯的数据包由发送设备通过自身的 TXD 接口传输到接收设备的 RXD 接口。在串口通讯的协议层中,规定了数据包的内容,它由启始位、主体数据、校验位以及停止位组成,通讯双方的数据包格式要约定一致才能正常收发数据,如下图:

3.1波特率
3.2起始和停止信号
串口通信的一个数据包从起始信号开始,直到停止信号结束。数据包的起始信号由一个逻辑 0 的数据位表示,而数据包的停止信号可由 0.5、1、1.5 或 2 个逻辑 1 的数据位表示,只要双方约定一致即可。
3.3 有效数据
在数据包的起始位之后紧接着的就是要传输的主体数据内容,也称为有效数据,有效数据的长度常被约定为 5、6、7 或 8 位长。
3.4 数据校验
四、功能框图

①功能引脚
nRTS:请求以发送 (Request To Send),n 表示低电平有效。如果使能 RTS 流控制,当 USART接收器准备好接收新数据时就会将 nRTS 变成低电平;当接收寄存器已满时,nRTS 将被设置为高电平。该引脚只适用于硬件流控制。
nCTS:清除以发送 (Clear To Send),n 表示低电平有效。如果使能 CTS 流控制,发送器在发送下一帧数据之前会检测 nCTS 引脚,如果为低电平,表示可以发送数据,如果为高电平则在发送完 当前数据帧之后停止发送。该引脚只适用于硬件流控制。
②数据寄存器
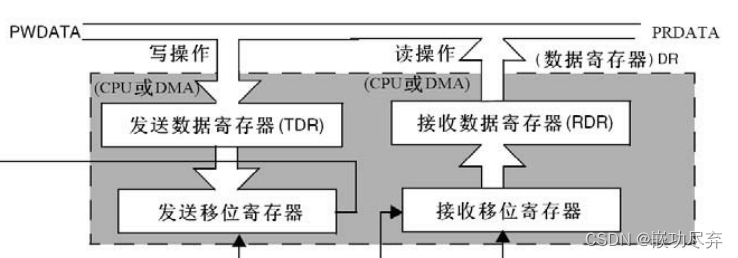
TDR 和 RDR 都是介于系统总线和移位寄存器之间。串行通信是一个位一个位传输的,发送时把TDR 内容转移到发送移位寄存器,然后把移位寄存器数据每一位发送出去,接收时把接收到的每一位顺序保存在接收移位寄存器内然后才转移到 RDR。
③控制器

④小数波特率生成
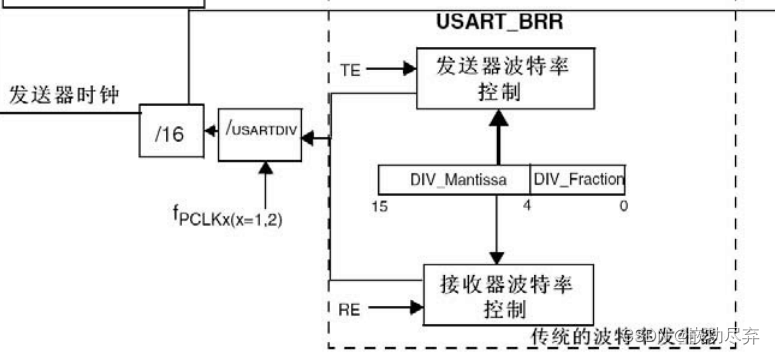
计算公式:


⑤余下部分

五、STM32 串口通信实验
本文使用 STM32F103VET6 野火指南者开发板的 USART1 进行实验。
5.1编程要点
5.2核心代码
//USART 初始化配置
void USART_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
// 打开串口GPIO的时钟
USART_GPIO_APBxClkCmd(USART_GPIO_CLK, ENABLE);
// 打开串口外设的时钟
USART_APBxClkCmd(USART_CLK, ENABLE);
// 将USART Tx的GPIO配置为推挽复用模式
GPIO_InitStructure.GPIO_Pin = USART_TX_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(USART_TX_GPIO_PORT, &GPIO_InitStructure);
// 将USART Rx的GPIO配置为浮空输入模式
GPIO_InitStructure.GPIO_Pin = USART_RX_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(USART_RX_GPIO_PORT, &GPIO_InitStructure);
// 配置串口的工作参数
// 配置波特率
USART_InitStructure.USART_BaudRate = USART_BAUDRATE;
// 配置 针数据字长
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
// 配置停止位
USART_InitStructure.USART_StopBits = USART_StopBits_1;
// 配置校验位
USART_InitStructure.USART_Parity = USART_Parity_No ;
// 配置硬件流控制
USART_InitStructure.USART_HardwareFlowControl =
USART_HardwareFlowControl_None;
// 配置工作模式,收发一起
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
// 完成串口的初始化配置
USART_Init(USARTx, &USART_InitStructure);
// 串口中断优先级配置
NVIC_Configuration();
// 使能串口接收中断
USART_ITConfig(USARTx, USART_IT_RXNE, ENABLE);
// 使能串口
USART_Cmd(USARTx, ENABLE);
}
//中断配置
static void NVIC_Configuration(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
/* 嵌套向量中断控制器组选择 */
/* 提示 NVIC_PriorityGroupConfig() 在整个工程只需要调用一次来配置优先级分组*/
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
/* 配置USART为中断源 */
NVIC_InitStructure.NVIC_IRQChannel = USART_IRQ;
/* 抢断优先级*/
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
/* 子优先级 */
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
/* 使能中断 */
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
/* 初始化配置NVIC */
NVIC_Init(&NVIC_InitStructure);
}/***************** 发送一个字节 **********************/
void Usart_SendByte( USART_TypeDef * pUSARTx, uint8_t ch)
{
/* 发送一个字节数据到USART */
USART_SendData(pUSARTx,ch);
/* 等待发送数据寄存器为空 */
while (USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET);
}
/***************** 发送字符串 **********************/
void Usart_SendString( USART_TypeDef * pUSARTx, char *str)
{
unsigned int k=0;
do
{
Usart_SendByte( pUSARTx, *(str + k) );
k++;
} while(*(str + k)!='\0');
/* 等待发送完成 */
while(USART_GetFlagStatus(pUSARTx,USART_FLAG_TC)==RESET)
{}
}
///重定向c库函数printf到串口,重定向后可使用printf函数
int fputc(int ch, FILE *f)
{
/* 发送一个字节数据到串口 */
USART_SendData(USARTx, (uint8_t) ch);
/* 等待发送完毕 */
while (USART_GetFlagStatus(USARTx, USART_FLAG_TXE) == RESET);
return (ch);
}
///重定向c库函数scanf到串口,重写向后可使用scanf、getchar等函数
int fgetc(FILE *f)
{
/* 等待串口输入数据 */
while (USART_GetFlagStatus(USARTx, USART_FLAG_RXNE) == RESET);
return (int)USART_ReceiveData(USARTx);
}