前言
ROS不需要在特定的环境下进行安装,不管你是Ubuntu的什么版本或者还是虚拟机都可以按照教程进行安装。
1.安装ROS
一键安装ros及ros2
wget http://fishros.com/install -O fishros && . fishros
按照指示安装你想要的ros。
ros和ros2是可以兼容的,因此你可以同时安装两个版本以满足不同的要求。
2.验证是否安装成功
打开终端
如果你同时安装了两个版本需要在启动前进行版本的选择。
这里以ros的版本为例进行下面的演示。
1.输入如下命令启动ros。
roscore
2.输入如下命令执行小乌龟图形化界面。
rosrun turtlesim turtlesim_node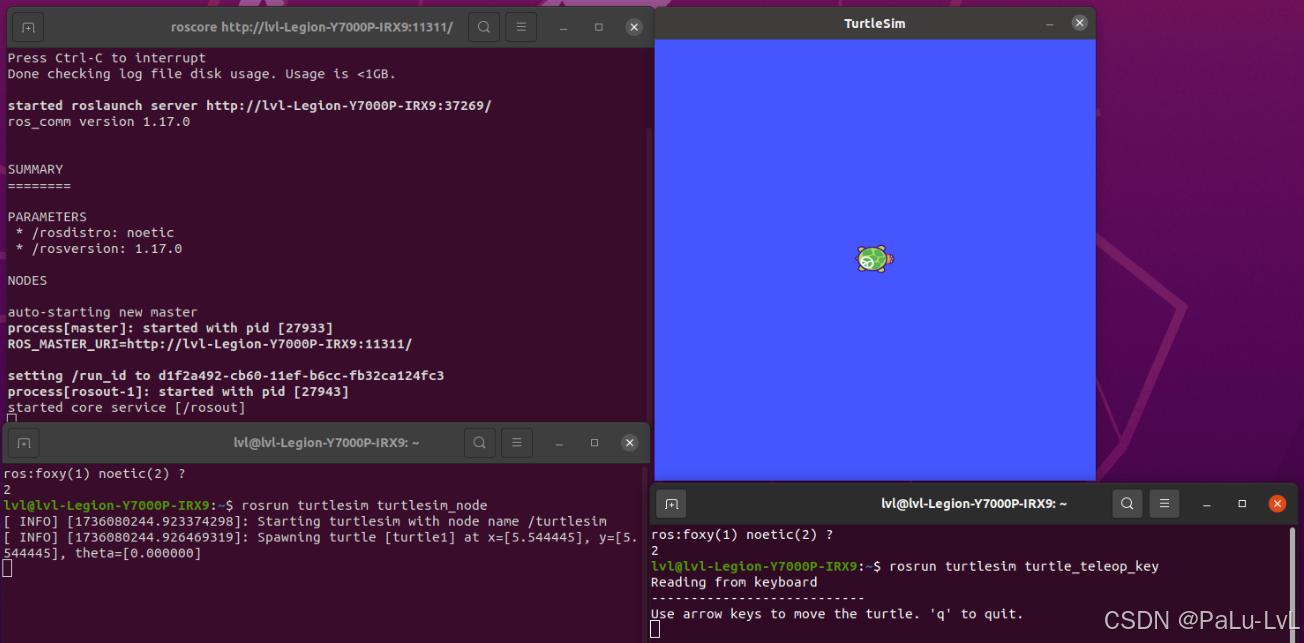
3.输入如下命令控制小乌龟的运动。
rosrun turtlesim turtle_teleop_key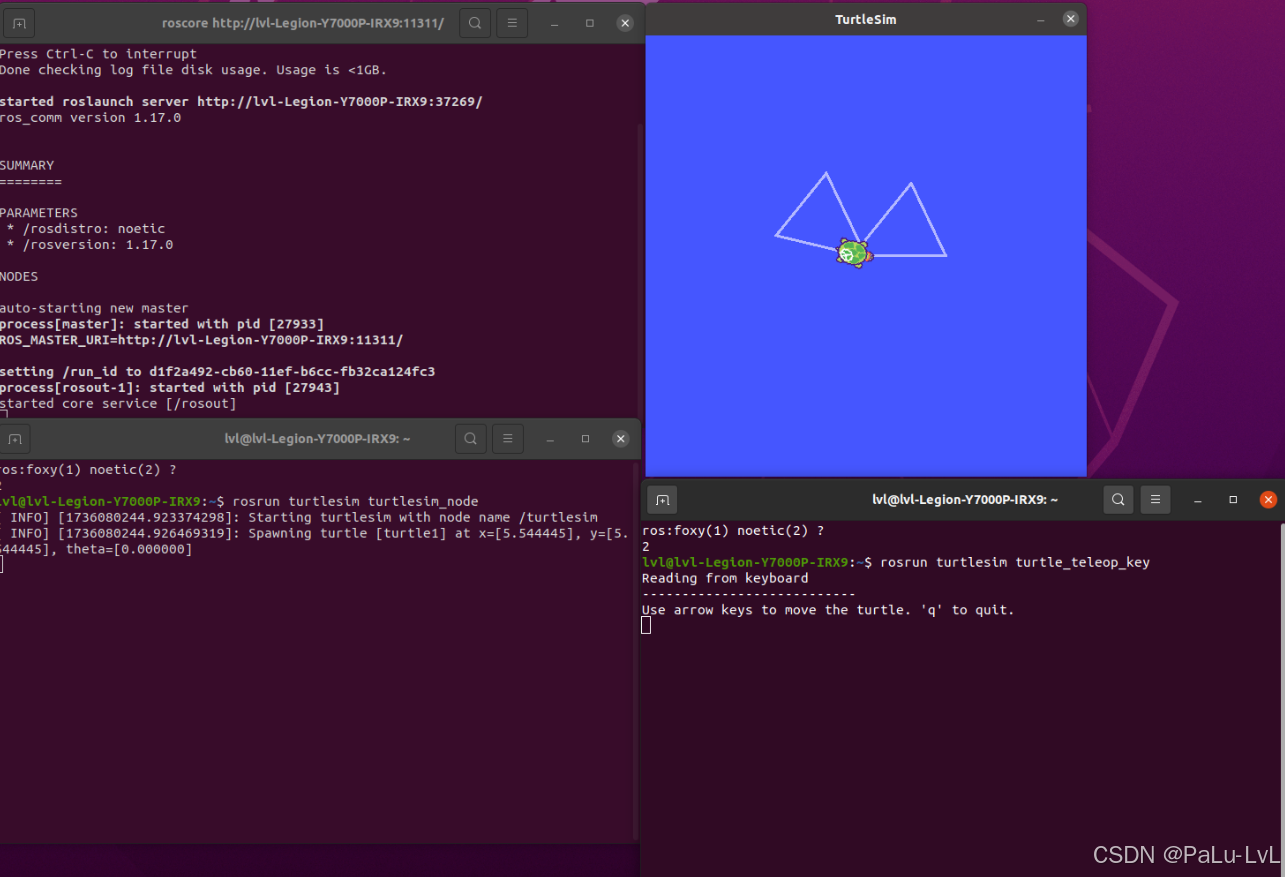
如果您的小乌龟成功走出路线来证明你已经配置成功了。
结束语
如果教程对大家有帮助请给我一键三连吧,您的鼓励是我前进的动力。