IIC–同步串行半双工总线
目录
-
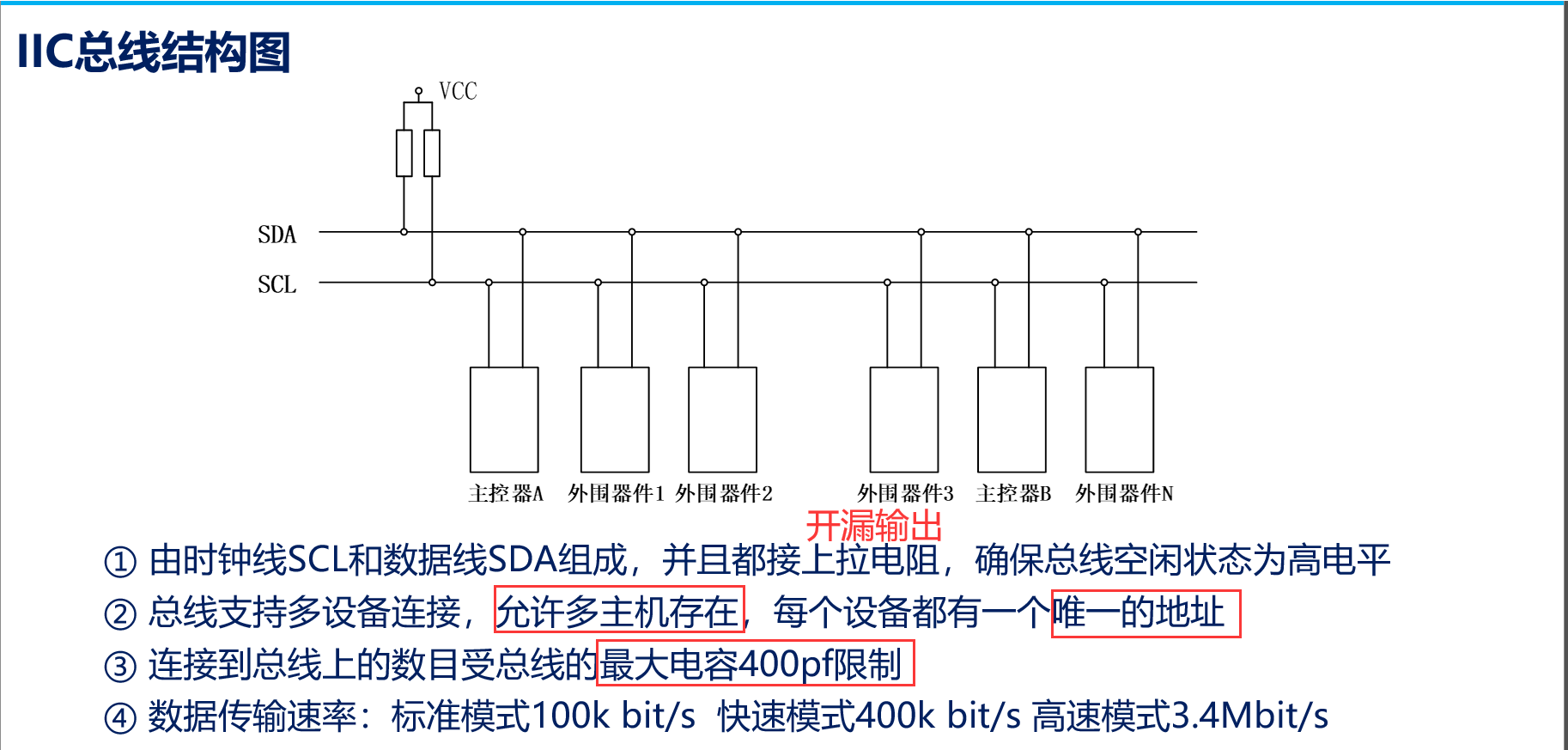
两根总线 SCL-串行时钟总线 SDA双向串行数据总线
-
“总线”指多个设备共用的信号线
-
在一个 I2C 通讯总线中,可连接多个 I2C 通讯设备,支持多个通讯主机及多个通讯从机。多为一主多从
-
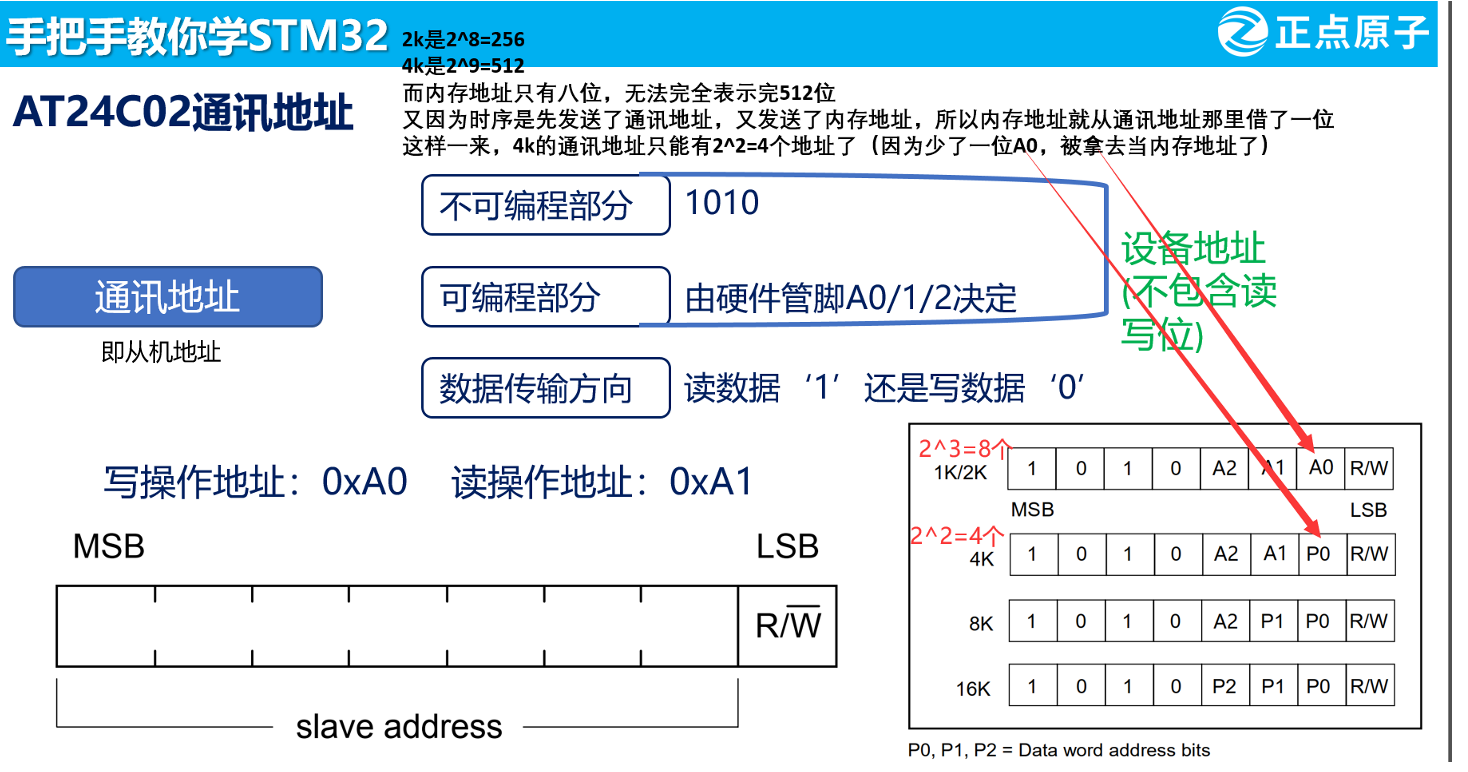
寻址机制: 通过一个地址, 在设计硬件的时候就已经设置好了, 通过SDA线进行发送, 有七位或者是十位
-
总线通过上拉电阻接到电源。当I2C设备空闲时,会输出高阻态(防止不同从机之间导通短路),而当所有设备都空闲,都输出高阻态时,由上拉电阻把总线拉成高电平。“线与”逻辑,一低全低,IO口使用开漏输出
-
多个主机同时使用总线时,为了防止数据冲突,会利用仲裁方式决定由哪个设备占用总线。
-
具有三种传输模式:标准模式传输速率为 1 00kbit/s ,快速模式为 400kbit/s ,高速模式下可达 3.4Mbit/s,但目前大多 I2C 设备尚不支持高速模式。
-
连接到相同总线的 IC 数量受到总线的最大电容 400pF 限制 。
软件IIC
时序总结
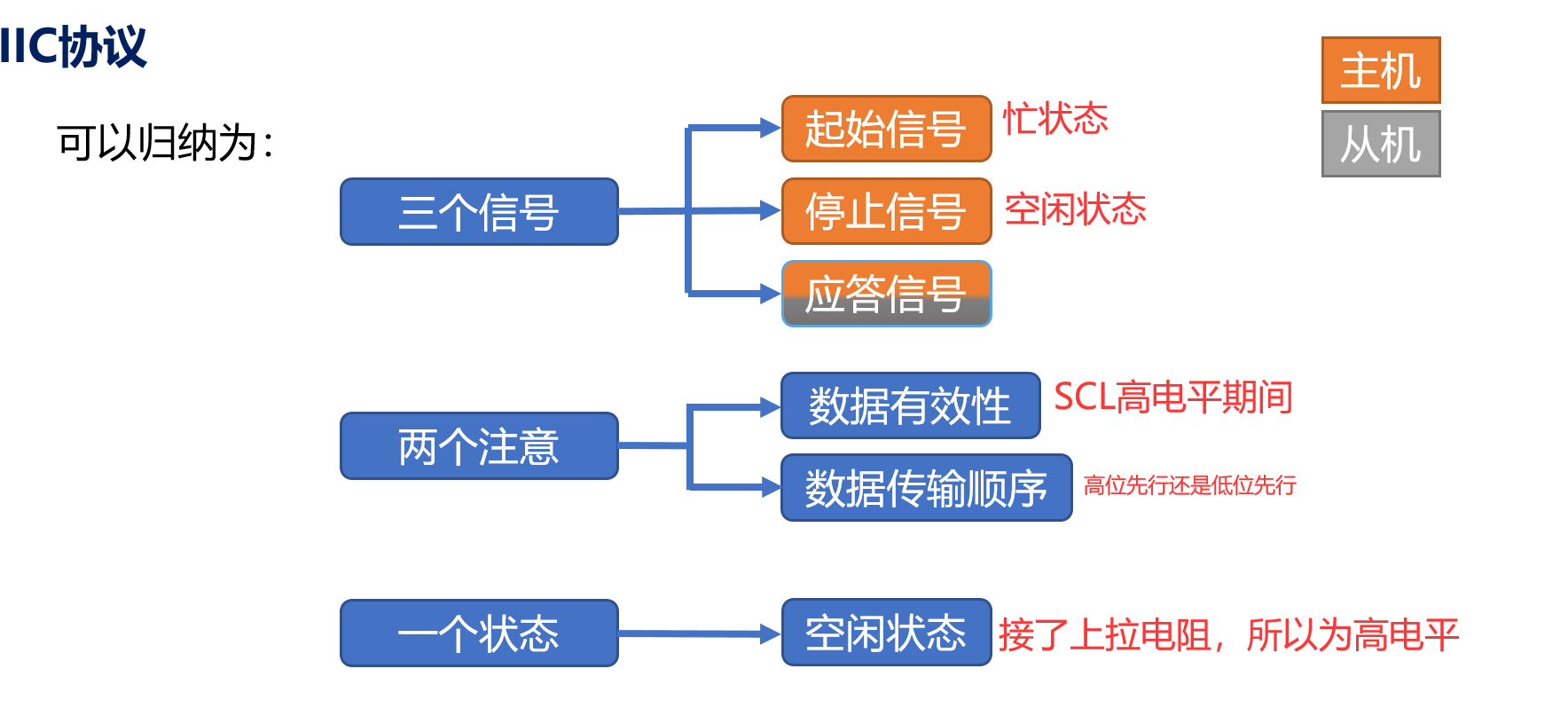
在SCL低电平期间,SDA可以随便改变,但是在SCL高电平期间,只要SDA发生了变化,那么就一定会产生起始或者终止信号,在发过起始信号后,SCL只在读取SDA的时候为高,其他时间都为低,应答就是发送/接收一个字节的一位,即去掉for循环的部分
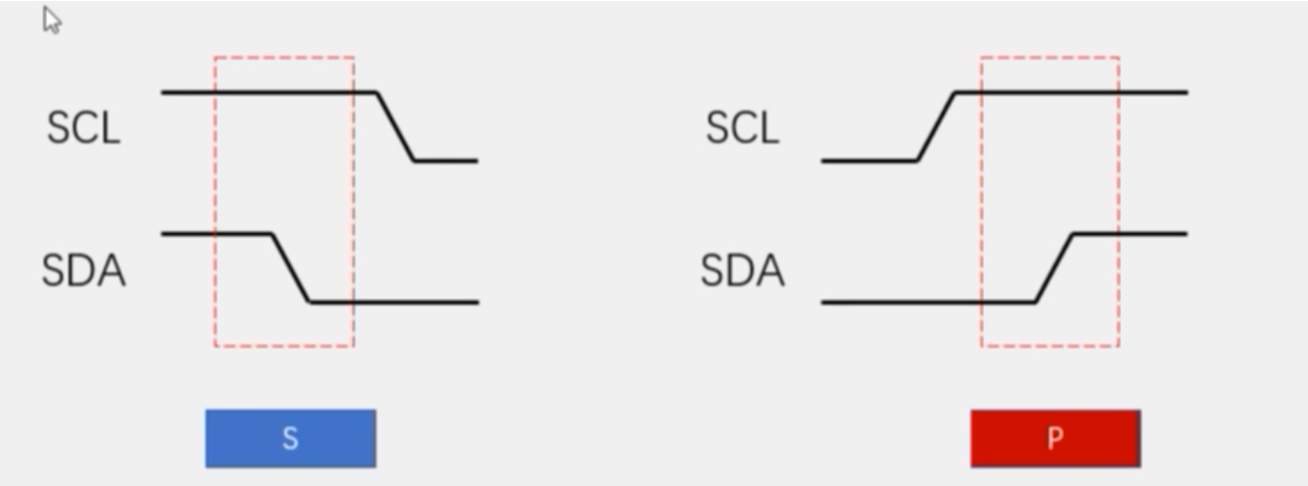
起始条件和终止条件
起始条件:在SCL高电平期间,SDA拉低
终止条件:在SCL高电平期间,SDA拉高
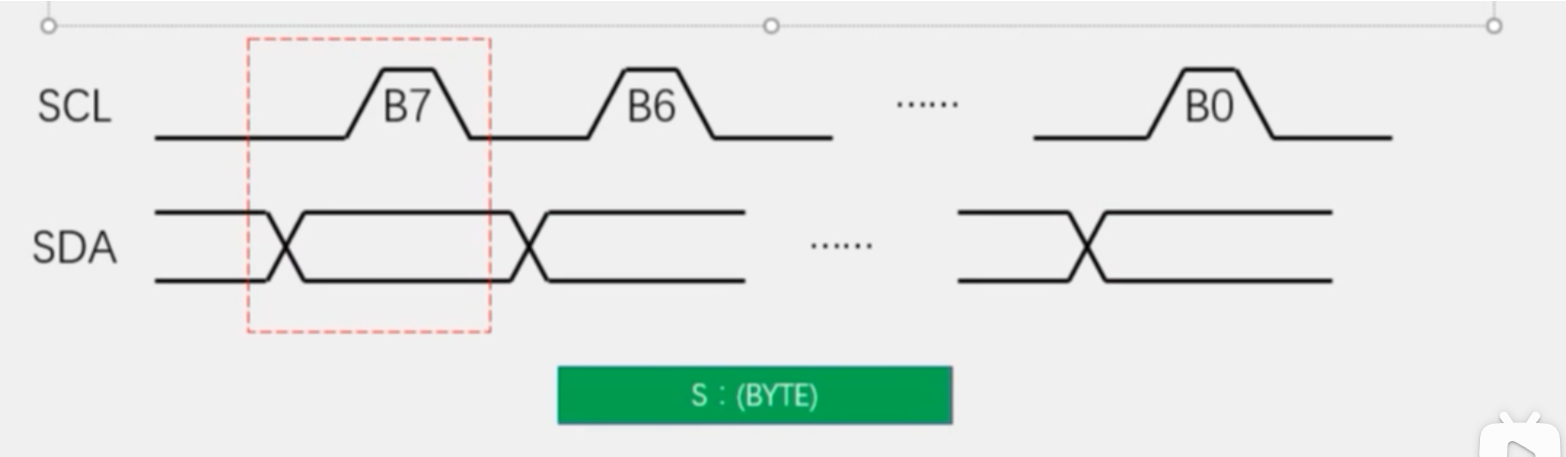
发送一个字节
SCL低电平期间,主机将数据位依次放在SDA线上(高位在前),然后拉高SCL,从机将在SCL高电平期间读取数据位,依次遵循上述过程8次,即可发送一个字节
注意:由于是在SCL高电平期间读取的数据,故在SCL高电平期间不允许SDA发生任何变化,否则就会被当作起始或终止信号
接收一个字节
在SCL低电平期间,从机将数据位依次放在SDA线上(高位在前),然后拉高SCL,主机将在SCL高电平期间读取数据位,依次遵循上述过程8次,即可接收一个字节
注意:
-
主机在接收之前,需要释放SDA,即把SDA置1,把控制权交给从机
-
由于是在SCL高电平期间读取的数据,故在SCL高电平期间不允许SDA发生任何变化,否则就会被当作起始或终止信号
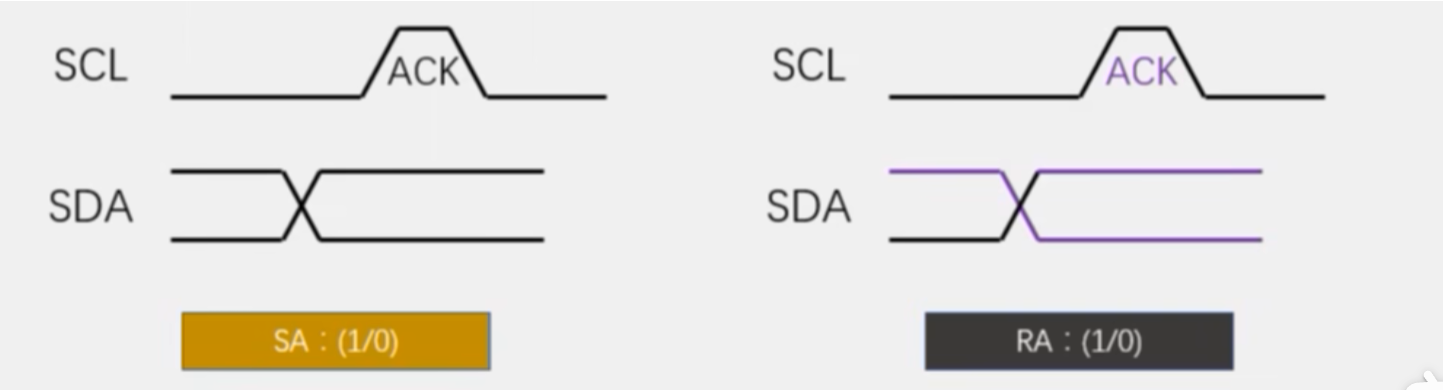
应答信号
发送应答:在接收完一个字节后,主机在下一个时钟发送一位数据,数据0表示应答,数据1表示非应答(同发送一个字节操作)
接收应答:在发送完一个字节后,主机在下一个时钟接收一位数据,判断从机是否应答,数据0表示应答,数据1表示非应答(主机在接收之前需要释放SDA,把控制权给到从机,同接收一个字节操作)
理解:在上拉电阻的影响下,SDA在默认情况下是高电平,从而从机拉低SDA表示从机给了应答
硬件IIC
协议层
同软件IIC
框图
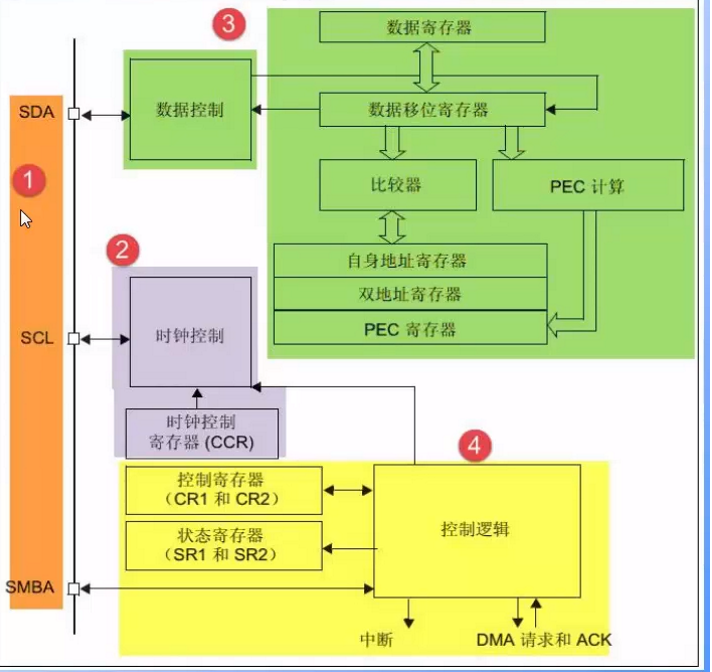
①通讯引脚, 还有一个引脚是为了兼容SMBus协议
②时钟控制逻辑, SCL线的时钟信号, 根据寄存器CCR控制, 在快速模式下可以选择时钟的占空比, 外设时钟源为PCLK1
③数据控制逻辑, 比较器用来比较自身的地址, PEC寄存器拿来数据校验, 很少使用
④整体控制逻辑.
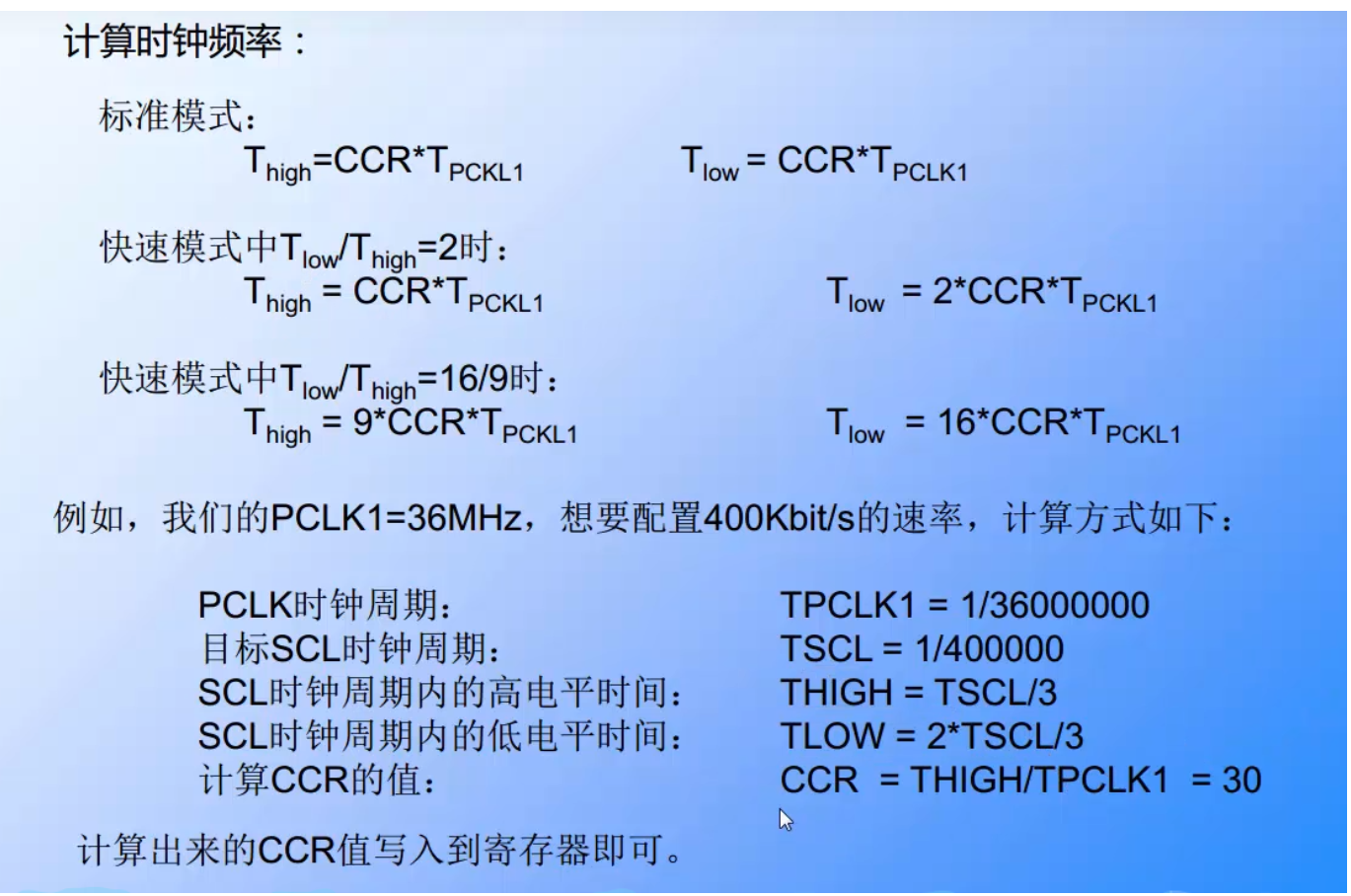
时钟频率计算
通讯过程
主机发送
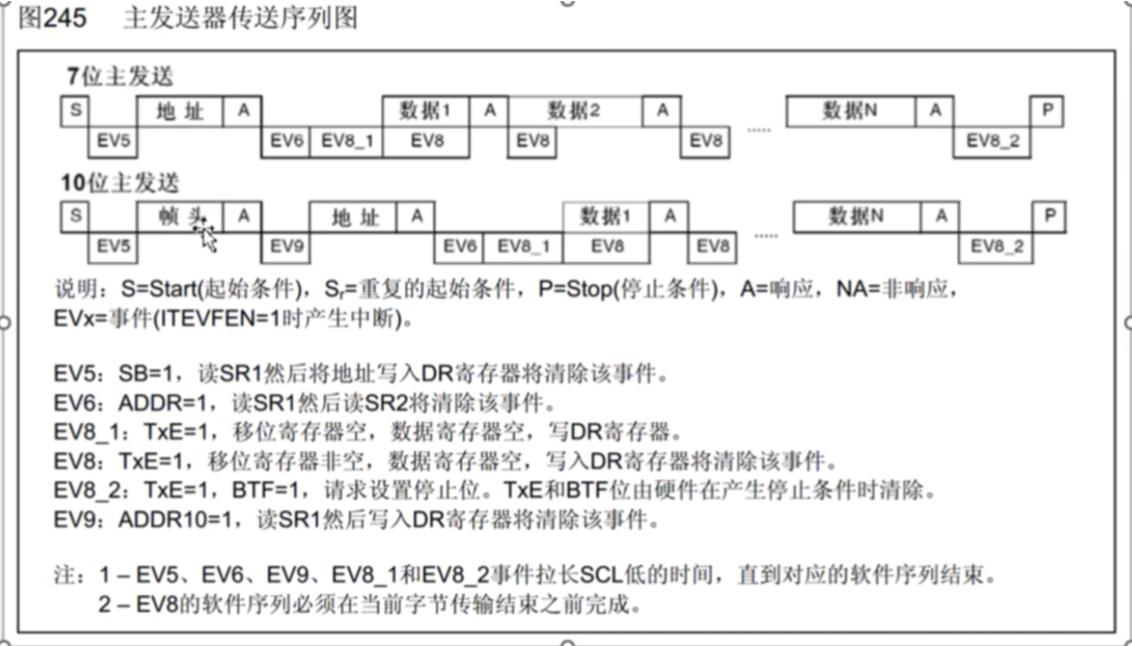
SB=1--起始位发送完成
ADDR=1---地址发送完成
TxE=1---数据寄存器为空
BTF=1---数据字节发送完成(移位寄存器为空)
主机接收
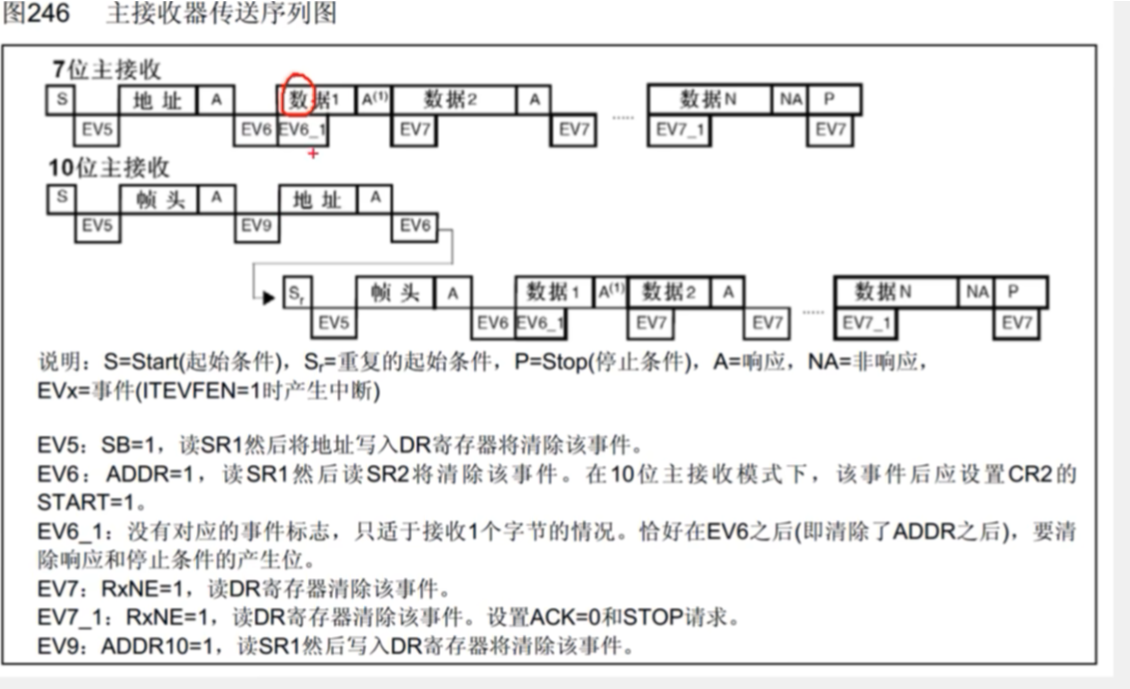
RxNE = 1: 接收的时候数据寄存器为非空
状态位需要清除,一般是读取相关寄存器后就会清楚,具体要看寄存器的描述
使用函数I2C_CheckEvent可以直接检查对应的事件, 这个函数自动清除事件
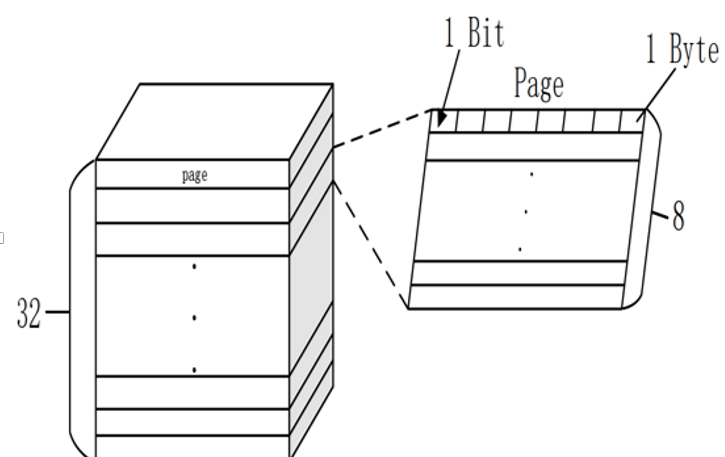
读写EEPROM(AT24C02)
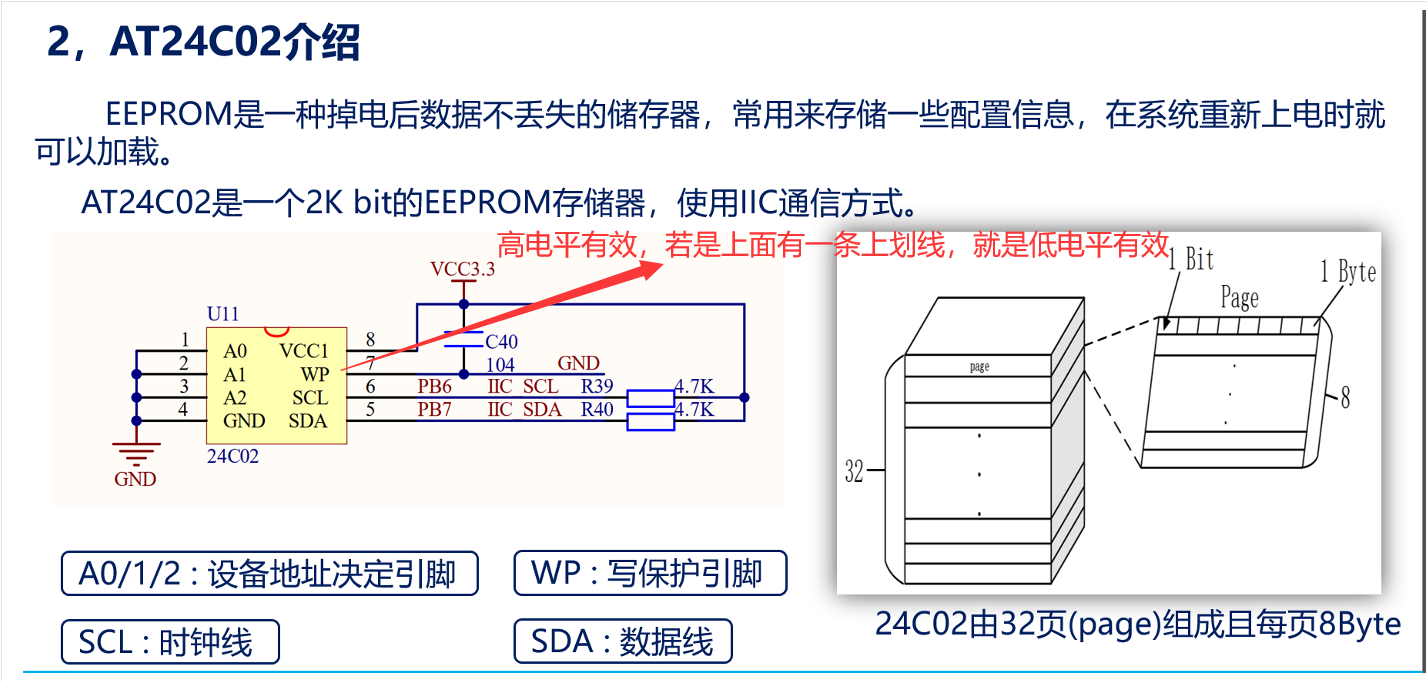

由手册可知,AT24C02的写入周期最多要5ms,但是为了保险起见,我们还是延时>5ms为好

读写时序
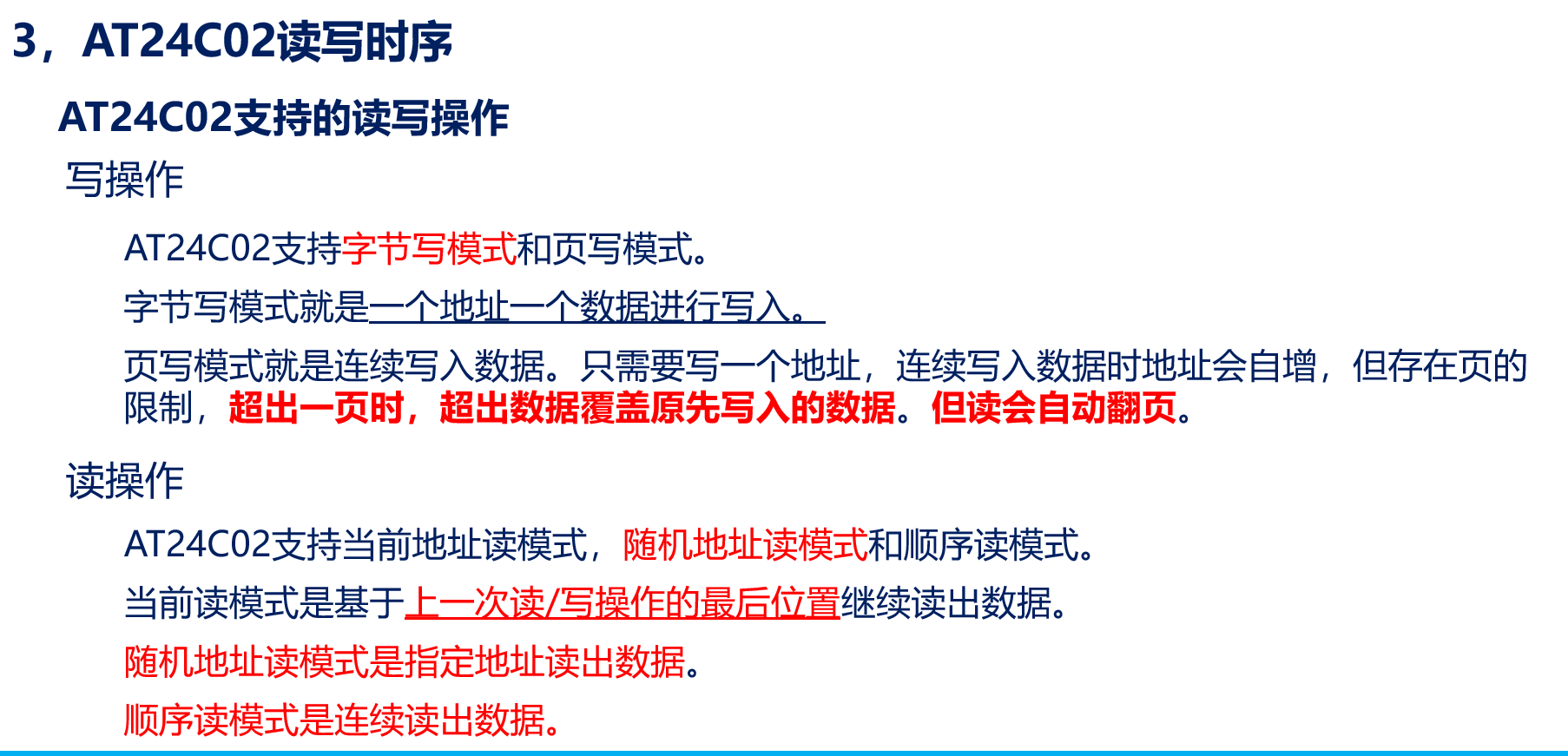
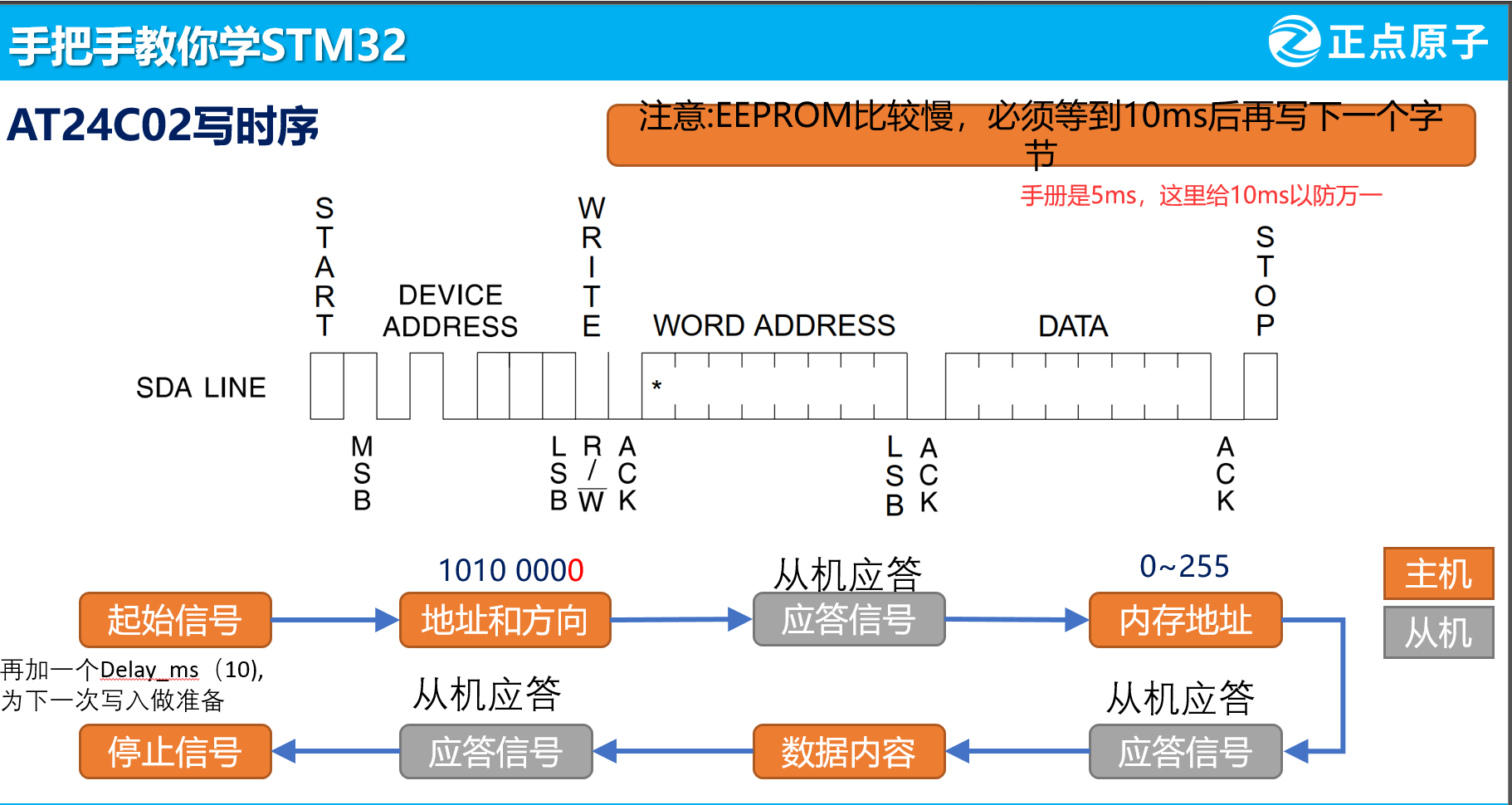
写时序
Byte Write
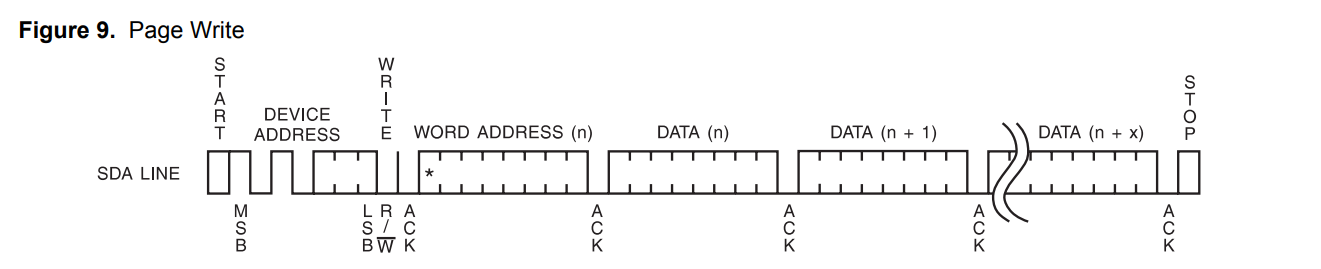
Page Write
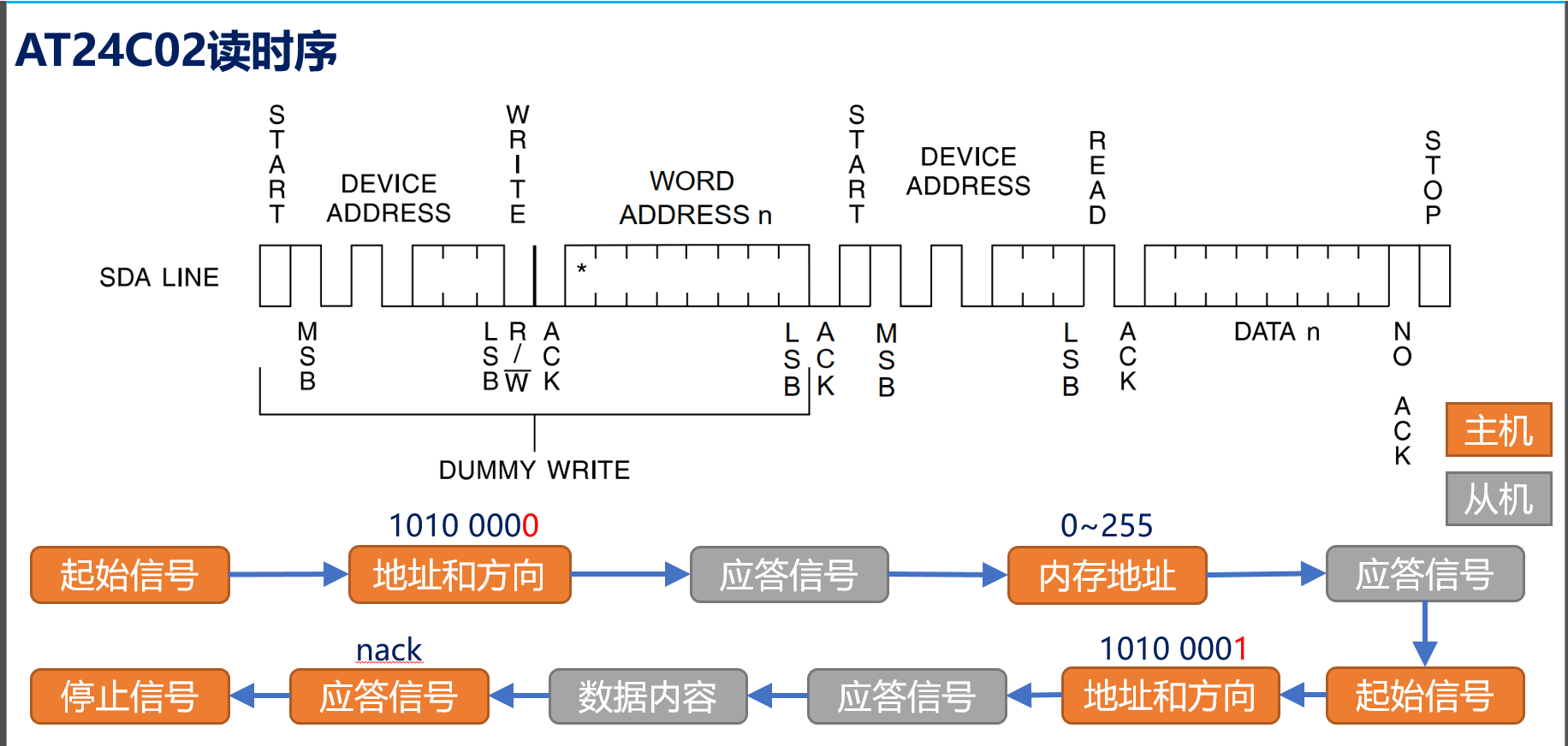
读时序
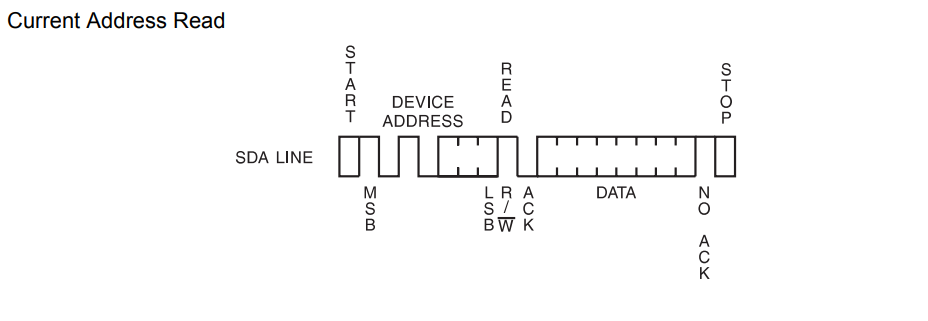
Current Address Read
芯片24C08内部有一个地址计数器,记录了上一个数据访问的地址,不论是读取还是写入。因此,若上一个操作的地址是n,那么么下一步执行读取当前地址所得到的数据就是n+1。当24C08收到Control Byte后,它在SDA总线上生成ACK信号以及8bit地址n+1,主控制器则在SDA上产生not ACK信号示意24C08停止继续传输,最后主控制器产生stop结束此次任务。
注意:AT24C02 EEPROM芯片不支持当前地址读取功能,而C04往后的就支持了
Random Read
随机读取并不是真的“随机”,而是读取指定地址是的数据,意思是允许主控器读取被控器任意地址的数据。
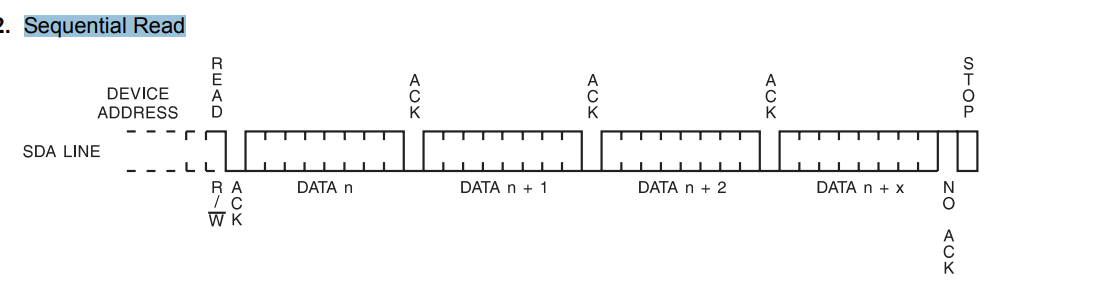
Sequential Read
顺序读
顺序读取是主机读取某一特定地址及其之后的若干个数据
顺序读取前面的逻辑和随机读取一致,直到最后一步:主机在接收到数据后并不发送not ACK而是发送ACK,这样从机继续向主控器发送数据,直到主机产生not ACK为止,最后主机会在发送not ACK之后发送stop结束任务。
代码实现
硬件
#ifndef __BSP_I2C_H
#define __BSP_I2C_H
#include "stm32f10x.h"
#define EEPROM_I2Cx I2C1
#define EEPROM_ADDRESS 0xA0
#define EEPROM_I2C_GPIO_SDA_PORT GPIOB
#define EEPROM_I2C_GPIO_SCL_PORT GPIOB
#define EEPROM_I2Cx_ADDRESS 0x51
#define EEPROM_I2C_GPIO_SCL_PIN GPIO_Pin_6
#define EEPROM_I2C_GPIO_SDA_PIN GPIO_Pin_7
void I2C_Config(void);
void EEPROM_Byte_Write(uint8_t addr,uint8_t data);
void EEPROM_Write(uint8_t addr,uint8_t *data,uint8_t num);
void EEPROM_ReadByte(uint8_t addr,uint8_t *data,uint32_t num);
void I2C_EEPROM_BufferWrite(uint8_t WriteAddr,uint8_t *pBuffer,uint16_t NumByteToWrite);
void EEPROM_WaitForWrite_END(void);
#endif
#include "bsp_i2c.h"
#include "bsp_led.h"
void I2C_Config()
{
//初始化EEPROM的GPIO引脚
//初始化I2C
GPIO_InitTypeDef GPIO_InitStructure;
I2C_InitTypeDef I2C_InitStruct;
//开启GPIO,I2C时钟
// RCC_AHBPeriphClockCmd(RCC_AHBPeriph_FSMC,DISABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_I2C1,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
//SCL
GPIO_InitStructure.GPIO_Pin = EEPROM_I2C_GPIO_SCL_PIN ;//PB6
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD;
GPIO_Init(EEPROM_I2C_GPIO_SCL_PORT,&GPIO_InitStructure);
//SDA
GPIO_InitStructure.GPIO_Pin = EEPROM_I2C_GPIO_SDA_PIN ;//PB7
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD;
GPIO_Init(EEPROM_I2C_GPIO_SDA_PORT,&GPIO_InitStructure);
I2C_InitStruct.I2C_ClockSpeed = 400000;
I2C_InitStruct.I2C_Mode = I2C_Mode_I2C; //I2C模式还是MBus模式
I2C_InitStruct.I2C_DutyCycle = I2C_DutyCycle_2; //占空比
I2C_InitStruct.I2C_OwnAddress1 = EEPROM_I2Cx_ADDRESS; //地址随便给,只要不和总线上其他设备一样
I2C_InitStruct.I2C_Ack = I2C_Ack_Enable;
I2C_InitStruct.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit;//7or10位地址
I2C_Init(EEPROM_I2Cx,&I2C_InitStruct);
I2C_Cmd(EEPROM_I2Cx,ENABLE);
}
//从EEPROM写入数据
void EEPROM_Byte_Write(uint8_t addr,uint8_t data)
{
I2C_GenerateSTART(EEPROM_I2Cx,ENABLE);//起始信号
while(I2C_CheckEvent(EEPROM_I2Cx,I2C_EVENT_MASTER_MODE_SELECT)==ERROR);//EV5 等待起始信号发送完成
I2C_Send7bitAddress(EEPROM_I2Cx,EEPROM_ADDRESS,I2C_Direction_Transmitter); //发送EEPROM从机地址
//因为EV8是指数据寄存器为空,此事件比较普遍,一般都会发生,所以此处略去
while(I2C_CheckEvent(EEPROM_I2Cx,I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED) == ERROR);//EV6 等待地址发送完成
I2C_SendData(EEPROM_I2Cx,addr); //发送要操作的地址
while(I2C_CheckEvent(EEPROM_I2Cx,I2C_EVENT_MASTER_BYTE_TRANSMITTING) == ERROR);//EV8
I2C_SendData(EEPROM_I2Cx,data); //发送数据
while(I2C_CheckEvent(EEPROM_I2Cx,I2C_EVENT_MASTER_BYTE_TRANSMITTED) == ERROR);//EV8_2
I2C_GenerateSTOP(EEPROM_I2Cx,ENABLE);
}
//页写
void EEPROM_Write(uint8_t addr,uint8_t *data,uint8_t num)
{
I2C_GenerateSTART(EEPROM_I2Cx,ENABLE);//起始信号
while(I2C_CheckEvent(EEPROM_I2Cx,I2C_EVENT_MASTER_MODE_SELECT) == ERROR);//EV5 等待起始信号发送完成
I2C_Send7bitAddress(EEPROM_I2Cx,EEPROM_ADDRESS,I2C_Direction_Transmitter); //发送EEPROM从机设备地址
//因为EV8是指数据寄存器为空,此事件比较普遍,一般都会发生,所以此处略去
while(I2C_CheckEvent(EEPROM_I2Cx,I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED) == ERROR);//EV6 等待地址发送完成
I2C_SendData(EEPROM_I2Cx,addr); //发送要操作的地址(字地址)
while(I2C_CheckEvent(EEPROM_I2Cx,I2C_EVENT_MASTER_BYTE_TRANSMITTING) == ERROR);//EV8
while(num)
{
I2C_SendData(EEPROM_I2Cx,*data);
while(I2C_CheckEvent(EEPROM_I2Cx,I2C_EVENT_MASTER_BYTE_TRANSMITTED) == ERROR);
data++;//数组地址++
num--;
}
I2C_GenerateSTOP(EEPROM_I2Cx,ENABLE);
}
//从EEPROM读取数据
void EEPROM_ReadByte(uint8_t addr,uint8_t *data,uint32_t num)
{
I2C_GenerateSTART(EEPROM_I2Cx,ENABLE);//起始信号
while(I2C_CheckEvent(EEPROM_I2Cx,I2C_EVENT_MASTER_MODE_SELECT) == ERROR);//EV5 等待起始信号发送完成
I2C_Send7bitAddress(EEPROM_I2Cx,EEPROM_ADDRESS,I2C_Direction_Transmitter); //发送EEPROM从机设备地址
while(I2C_CheckEvent(EEPROM_I2Cx,I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED) == ERROR);//EV6 等待地址发送完成
I2C_SendData(EEPROM_I2Cx,addr); //发送要操作的地址-字地址
while(I2C_CheckEvent(EEPROM_I2Cx,I2C_EVENT_MASTER_BYTE_TRANSMITTING) == ERROR);//EV8
I2C_GenerateSTART(EEPROM_I2Cx,ENABLE);//第二次起始信号
while(I2C_CheckEvent(EEPROM_I2Cx,I2C_EVENT_MASTER_MODE_SELECT) == ERROR);//EV5 等待起始信号发送完成
I2C_Send7bitAddress(EEPROM_I2Cx, EEPROM_ADDRESS, I2C_Direction_Receiver); //发送地址
while(I2C_CheckEvent(EEPROM_I2Cx, I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED)==ERROR);//EV6
while(num)
{
if(num==1)
{
I2C_AcknowledgeConfig(EEPROM_I2Cx, DISABLE); //提前设置不响应
}
while(I2C_CheckEvent(EEPROM_I2Cx, I2C_EVENT_MASTER_BYTE_RECEIVED)==ERROR); //EV7
*data = I2C_ReceiveData(EEPROM_I2Cx);
data++;
num--;
}
I2C_GenerateSTOP(EEPROM_I2Cx, ENABLE);
I2C_AcknowledgeConfig(EEPROM_I2Cx, ENABLE); //恢复自动响应
}
/**
* @brief 将缓冲区中的数据写到I2C EEPROM中
* @param
* @arg pBuffer:缓冲区指针
* @arg WriteAddr:写地址
* @arg NumByteToWrite:写的字节数
* @retval 无
*
***************整体思路************y********
1.先算地址是否对齐,若不对齐就算出对齐需要的数据个数->count
2.算出页数,不足一页的数据数
3.若是地址对齐了,若只有一页就直接写入
若有多页且存在非整页数,就先写入整页的数据
然后while循环地址一次加一页,页数依次减少,直到页数"小于"1,再把不足一页的写入
4.若是地址未对齐,若只有一页就直接写入,若有多页且存在非整页数,就先输入count个数据补齐地址
此时总个数和地址记得减去count个
此时对齐了,就重复步骤三的后部分就OKl了
*********************************************/
void I2C_EEPROM_BufferWrite(uint8_t WriteAddr,uint8_t *pBuffer,uint16_t NumByteToWrite)
{
uint8_t NumOfPage = 0,NumOfSingle = 0,Addr = 0,count = 0,I2C_PageSize = 8;
Addr = WriteAddr % I2C_PageSize;//判断是否地址对齐,Addr->多出来的地址,也可以说是字节个数
count = I2C_PageSize - Addr; // 需要填充的地址数目
NumOfPage = NumByteToWrite / I2C_PageSize; //页数
NumOfSingle = NumByteToWrite % I2C_PageSize; //不足一页的数据-非整页
/*地址对齐*/
if(Addr == 0)
{
//写的字节数小于一页所能写的最大字节数,即页数"小于"1
if(NumOfPage == 0)
{
EEPROM_Write(WriteAddr,pBuffer,NumOfSingle);
EEPROM_WaitForWrite_END();//等待写入完成
}
//写的字节数大于一页所能写的最大字节数,即NumOfPage != 0
else
{
//先把整页的写完
while(NumOfPage--)//a-- ***先使用后减减***
{
EEPROM_Write(WriteAddr,pBuffer,I2C_PageSize);
EEPROM_WaitForWrite_END();//等待写入完成
/*换下一页的地址*/
WriteAddr += I2C_PageSize;
pBuffer += I2C_PageSize;
}
//上面while循环写到NumOfPage = 0 时停下,若此时有不足一页的数据,就写完(上一次循环完成之前已经把地址换到了下一页了)
if(NumOfSingle != 0)
{
EEPROM_Write(WriteAddr,pBuffer,NumOfSingle);
EEPROM_WaitForWrite_END();//等待写入完成
}
}
}
/*地址没有对齐*/
else
{
//写的字节数小于一页所能写的最大字节数,即页数"小于"1
//经测验可知若写入的数据小于页容量,则不用地址对齐
if(NumOfPage == 0)
{
EEPROM_Write(WriteAddr,pBuffer,NumOfSingle);
EEPROM_WaitForWrite_END();//等待写入完成
}
//写的字节数大于一页所能写的最大字节数,即NumOfPage != 0
else
{
NumByteToWrite -= count; //
NumOfPage = NumByteToWrite / I2C_PageSize;
NumOfSingle = NumByteToWrite % I2C_PageSize;
if(count != 0)
{
EEPROM_Write(WriteAddr,pBuffer,count);//先写入count个数据-把地址补齐
EEPROM_WaitForWrite_END();
WriteAddr += count;//写入地址不齐
pBuffer += count;//地址补齐
}
/*下面的同上方地址对齐的一致*/
while(NumOfPage--)
{
EEPROM_Write(WriteAddr,pBuffer,I2C_PageSize);
EEPROM_WaitForWrite_END();//等待写入完成
/*换下一页的地址*/
WriteAddr += I2C_PageSize;
pBuffer += I2C_PageSize;
}
//上面while循环写到NumOfPage = 0 时停下,若此时有不足一页的数据,就写完(上一次循环完成之前已经把地址换到了下一页了)
if(NumOfSingle != 0)
{
EEPROM_Write(WriteAddr,pBuffer,NumOfSingle);
EEPROM_WaitForWrite_END();//等待写入完成
}
}
}
}
void EEPROM_WaitForWrite_END(void)
{
do{
I2C_GenerateSTART(EEPROM_I2Cx, ENABLE);
while(I2C_GetFlagStatus(EEPROM_I2Cx, I2C_FLAG_SB)==RESET);//EV5
I2C_ClearFlag(EEPROM_I2Cx, I2C_FLAG_SB);//清楚标志位
//发送地址, 这时候为读, 如果间隔较小会在这一步没有应答
I2C_Send7bitAddress(EEPROM_I2Cx, EEPROM_ADDRESS, I2C_Direction_Transmitter);
}
while(I2C_GetFlagStatus(EEPROM_I2Cx, I2C_FLAG_ADDR) == RESET);//检测是否收到EEPROM的写完之后的应答
//实现之后直接结束这一次==测试没有也行
//I2C_GenerateSTOP(EEPROM_I2Cx, ENABLE);
}
软件
#ifndef _BSP_I2C_GPIO_H
#define _BSP_I2C_GPIO_H
#include <inttypes.h>
#define EEPROM_I2C_WR 0 /* 写控制bit */
#define EEPROM_I2C_RD 1 /* 读控制bit */
/* 定义I2C总线连接的GPIO端口, 用户只需要修改下面4行代码即可任意改变SCL和SDA的引脚 */
#define EEPROM_GPIO_PORT_I2C GPIOB /* GPIO端口 */
#define EEPROM_RCC_I2C_PORT RCC_APB2Periph_GPIOB /* GPIO端口时钟 */
#define EEPROM_I2C_SCL_PIN GPIO_Pin_6 /* 连接到SCL时钟线的GPIO */
#define EEPROM_I2C_SDA_PIN GPIO_Pin_7 /* 连接到SDA数据线的GPIO */
/* 定义读写SCL和SDA的宏,已增加代码的可移植性和可阅读性 */
#define EEPROM_I2C_SCL_1() GPIO_SetBits(EEPROM_GPIO_PORT_I2C, EEPROM_I2C_SCL_PIN) /* SCL = 1*/
#define EEPROM_I2C_SCL_0() GPIO_ResetBits(EEPROM_GPIO_PORT_I2C, EEPROM_I2C_SCL_PIN) /* SCL = 0*/
#define EEPROM_I2C_SDA_1() GPIO_SetBits(EEPROM_GPIO_PORT_I2C, EEPROM_I2C_SDA_PIN) /* SDA = 1*/
#define EEPROM_I2C_SDA_0() GPIO_ResetBits(EEPROM_GPIO_PORT_I2C, EEPROM_I2C_SDA_PIN) /* SDA = 0*/
/* 读SDA口线状态 */
#define EEPROM_I2C_SDA_READ() GPIO_ReadInputDataBit(EEPROM_GPIO_PORT_I2C, EEPROM_I2C_SDA_PIN)
void i2c_Start(void);
void i2c_Stop(void);
void i2c_SendByte(uint8_t _ucByte);
uint8_t i2c_ReadByte(void);
uint8_t i2c_WaitAck(void);
void i2c_Ack(void);
void i2c_NAck(void);
uint8_t i2c_CheckDevice(uint8_t _Address);
#endif
/*
应用说明:
在访问I2C设备前,请先调用 i2c_CheckDevice() 检测I2C设备是否正常,该函数会配置GPIO
*/
#include "bsp_i2c_gpio.h"
#include "stm32f10x.h"
static void i2c_CfgGpio(void);
/*
*********************************************************************************************************
* 函 数 名: i2c_Delay
* 功能说明: I2C总线位延迟,最快400KHz
* 形 参:无
* 返 回 值: 无
*********************************************************************************************************
*/
static void i2c_Delay(void)
{
uint8_t i;
/*
下面的时间是通过逻辑分析仪测试得到的。
工作条件:CPU主频72MHz ,MDK编译环境,1级优化
循环次数为10时,SCL频率 = 205KHz
循环次数为7时,SCL频率 = 347KHz, SCL高电平时间1.5us,SCL低电平时间2.87us
循环次数为5时,SCL频率 = 421KHz, SCL高电平时间1.25us,SCL低电平时间2.375us
*/
for (i = 0; i < 10; i++);
}
/*
*********************************************************************************************************
* 函 数 名: i2c_Start
* 功能说明: CPU发起I2C总线启动信号
* 形 参:无
* 返 回 值: 无
*********************************************************************************************************
*/
void i2c_Start(void)
{
/* 当SCL高电平时,SDA出现一个下跳沿表示I2C总线启动信号 */
EEPROM_I2C_SDA_1();
EEPROM_I2C_SCL_1();
i2c_Delay();
EEPROM_I2C_SDA_0();
i2c_Delay();
EEPROM_I2C_SCL_0();
i2c_Delay();
}
/*
*********************************************************************************************************
* 函 数 名: i2c_Stop
* 功能说明: CPU发起I2C总线停止信号
* 形 参:无
* 返 回 值: 无
*********************************************************************************************************
*/
void i2c_Stop(void)
{
/* 当SCL高电平时,SDA出现一个上跳沿表示I2C总线停止信号 */
EEPROM_I2C_SDA_0();
EEPROM_I2C_SCL_1();
i2c_Delay();
EEPROM_I2C_SDA_1();
}
/*
*********************************************************************************************************
* 函 数 名: i2c_SendByte
* 功能说明: CPU向I2C总线设备发送8bit数据
* 形 参:_ucByte : 等待发送的字节
* 返 回 值: 无
*********************************************************************************************************
*/
void i2c_SendByte(uint8_t _ucByte)
{
uint8_t i;
/* 先发送字节的高位bit7 */
for (i = 0; i < 8; i++)
{
if (_ucByte & 0x80)
{
EEPROM_I2C_SDA_1();
}
else
{
EEPROM_I2C_SDA_0();
}
i2c_Delay();
EEPROM_I2C_SCL_1();
i2c_Delay();
EEPROM_I2C_SCL_0();
if (i == 7)
{
EEPROM_I2C_SDA_1(); // 释放总线
}
_ucByte <<= 1; /* 左移一个bit */
i2c_Delay();
}
}
/*
*********************************************************************************************************
* 函 数 名: i2c_ReadByte
* 功能说明: CPU从I2C总线设备读取8bit数据
* 形 参:无
* 返 回 值: 读到的数据
*********************************************************************************************************
*/
uint8_t i2c_ReadByte(void)
{
uint8_t i;
uint8_t value;
/* 读到第1个bit为数据的bit7 */
value = 0;
for (i = 0; i < 8; i++)
{
value <<= 1;
EEPROM_I2C_SCL_1();
i2c_Delay();
if (EEPROM_I2C_SDA_READ())
{
value++;
}
EEPROM_I2C_SCL_0();
i2c_Delay();
}
return value;
}
/*
*********************************************************************************************************
* 函 数 名: i2c_WaitAck
* 功能说明: CPU产生一个时钟,并读取器件的ACK应答信号
* 形 参:无
* 返 回 值: 返回0表示正确应答,1表示无器件响应
*********************************************************************************************************
*/
uint8_t i2c_WaitAck(void)
{
uint8_t re;
EEPROM_I2C_SDA_1(); /* CPU释放SDA总线 */
i2c_Delay();
EEPROM_I2C_SCL_1(); /* CPU驱动SCL = 1, 此时器件会返回ACK应答 */
i2c_Delay();
if (EEPROM_I2C_SDA_READ()) /* CPU读取SDA口线状态 */
{
re = 1;
}
else
{
re = 0;
}
EEPROM_I2C_SCL_0();
i2c_Delay();
return re;
}
/*
*********************************************************************************************************
* 函 数 名: i2c_Ack
* 功能说明: CPU发送一个ACK信号
* 形 参:无
* 返 回 值: 无
*********************************************************************************************************
*/
void i2c_Ack(void)
{
EEPROM_I2C_SDA_0(); /* CPU驱动SDA = 0 */
i2c_Delay();
EEPROM_I2C_SCL_1(); /* CPU产生1个时钟 */
i2c_Delay();
EEPROM_I2C_SCL_0();
i2c_Delay();
EEPROM_I2C_SDA_1(); /* CPU释放SDA总线 */
}
/*
*********************************************************************************************************
* 函 数 名: i2c_NAck
* 功能说明: CPU产生1个NACK信号
* 形 参:无
* 返 回 值: 无
*********************************************************************************************************
*/
void i2c_NAck(void)
{
EEPROM_I2C_SDA_1(); /* CPU驱动SDA = 1 */
i2c_Delay();
EEPROM_I2C_SCL_1(); /* CPU产生1个时钟 */
i2c_Delay();
EEPROM_I2C_SCL_0();
i2c_Delay();
}
/*
*********************************************************************************************************
* 函 数 名: i2c_CfgGpio
* 功能说明: 配置I2C总线的GPIO,采用模拟IO的方式实现
* 形 参:无
* 返 回 值: 无
*********************************************************************************************************
*/
static void i2c_CfgGpio(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(EEPROM_RCC_I2C_PORT, ENABLE); /* 打开GPIO时钟 */
GPIO_InitStructure.GPIO_Pin = EEPROM_I2C_SCL_PIN | EEPROM_I2C_SDA_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD; /* 开漏输出 */
GPIO_Init(EEPROM_GPIO_PORT_I2C, &GPIO_InitStructure);
/* 给一个停止信号, 复位I2C总线上的所有设备到待机模式 */
i2c_Stop();
}
/*
*********************************************************************************************************
* 函 数 名: i2c_CheckDevice
* 功能说明: 检测I2C总线设备,CPU向发送设备地址,然后读取设备应答来判断该设备是否存在
* 形 参:_Address:设备的I2C总线地址
* 返 回 值: 返回值 0 表示正确, 返回1表示未探测到
*********************************************************************************************************
*/
uint8_t i2c_CheckDevice(uint8_t _Address)
{
uint8_t ucAck;
i2c_CfgGpio(); /* 配置GPIO */
i2c_Start(); /* 发送启动信号 */
/* 发送设备地址+读写控制bit(0 = w, 1 = r) bit7 先传 */
i2c_SendByte(_Address | EEPROM_I2C_WR);
ucAck = i2c_WaitAck(); /* 检测设备的ACK应答 */
i2c_Stop(); /* 发送停止信号 */
return ucAck;
}
/**
* @brief AT24C02写入一个字节
* @param WordAddress 要写入字节的地址
* @param Data 要写入的数据
* @retval 无
*/
void AT24C02_WriteByte(unsigned char WordAddress,Data)
{
i2c_Start();
i2i_SendByte(AT24C02_ADDRESS);
i2c_WaitAck();
i2i_SendByte(WordAddress);
i2c_WaitAck();
i2i_SendByte(Data);
i2c_WaitAck();
i2i_Stop();
}
/**
* @brief AT24C02读取一个字节
* @param WordAddress 要读出字节的地址
* @retval 读出的数据
*/
unsigned char AT24C02_ReadByte(unsigned char WordAddress)
{
unsigned char Data;
i2c_Start();
i2c_SendByte(AT24C02_ADDRESS);
i2c_WaitAck();
i2c_SendByte(WordAddress);
i2c_WaitAck();
i2c_Start();
i2c_SendByte(AT24C02_ADDRESS|0x01);
i2c_WaitAck();
Data=i2c_ReadByte();
i2c_NAck();
i2c_Stop();
return Data;
}
ucAck;
}
```c
/**
* @brief AT24C02写入一个字节
* @param WordAddress 要写入字节的地址
* @param Data 要写入的数据
* @retval 无
*/
void AT24C02_WriteByte(unsigned char WordAddress,Data)
{
i2c_Start();
i2i_SendByte(AT24C02_ADDRESS);
i2c_WaitAck();
i2i_SendByte(WordAddress);
i2c_WaitAck();
i2i_SendByte(Data);
i2c_WaitAck();
i2i_Stop();
}
/**
* @brief AT24C02读取一个字节
* @param WordAddress 要读出字节的地址
* @retval 读出的数据
*/
unsigned char AT24C02_ReadByte(unsigned char WordAddress)
{
unsigned char Data;
i2c_Start();
i2c_SendByte(AT24C02_ADDRESS);
i2c_WaitAck();
i2c_SendByte(WordAddress);
i2c_WaitAck();
i2c_Start();
i2c_SendByte(AT24C02_ADDRESS|0x01);
i2c_WaitAck();
Data=i2c_ReadByte();
i2c_NAck();
i2c_Stop();
return Data;
}