摘要
本文研究了多种优化算法在无人机(UAV)路径规划问题中的应用与表现对比。通过对比灰狼优化算法(GWO)、猎鹰算法(HHO)、混合协同规划算法(CPO)以及麻雀搜索算法(SSA)的表现,评估各算法在避障和路径平滑方面的效果。实验结果显示,CPO算法在全局搜索和路径平滑方面表现优异,能有效降低路径长度和避障率,提高无人机飞行的安全性与效率。
理论
无人机路径规划问题是一个典型的全局优化问题,需在复杂的环境中为无人机找到一条从起点到终点的最优路径,同时避开障碍物。
传统优化算法如灰狼优化算法(GWO)和猎鹰算法(HHO)在全局搜索能力上具有优势,而混合协同规划算法(CPO)和麻雀搜索算法(SSA)则通过多样化的搜索策略,在局部收敛性和全局寻优能力上表现出色。
本文将这些算法应用于UAV路径规划问题,并通过多次迭代比较它们的路径优化效果。
实验结果
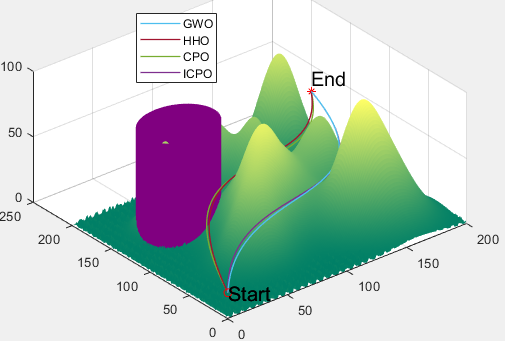
实验中,设置了复杂的三维地形和障碍物,通过各算法的路径规划效果进行对比:
-
路径对比图(见上图左侧):展示了不同算法生成的路径。可以看出,CPO和SSA生成的路径较为平滑且有效地避开了障碍物,而GWO和HHO的路径存在较多的急转弯。
-
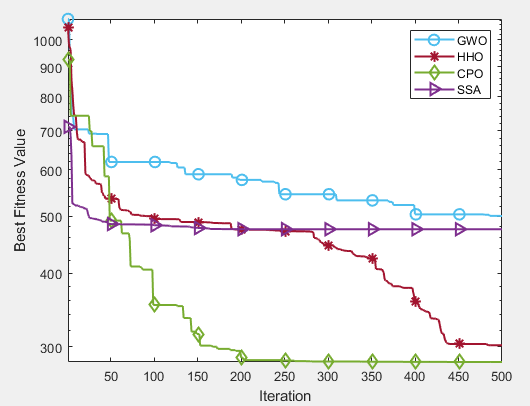
适应度值收敛曲线(见上图右侧):在500次迭代中,CPO的适应度值下降最快,最终达到了最低的适应度值,表明其在全局优化能力上优于其他算法。SSA的收敛速度虽略慢于CPO,但也较为稳定,而GWO和HHO的收敛效果相对较差。
部分代码
% 初始化参数
numIterations = 500; % 迭代次数
numAgents = 30; % 种群数量
startPoint = [0, 0];
endPoint = [200, 100];
obstacles = [50, 50; 100, 60]; % 障碍物位置
% 各优化算法的路径规划
[gwoPath, gwoFitness] = gwoPathPlanning(startPoint, endPoint, obstacles, numIterations);
[hhoPath, hhoFitness] = hhoPathPlanning(startPoint, endPoint, obstacles, numIterations);
[cpoPath, cpoFitness] = cpoPathPlanning(startPoint, endPoint, obstacles, numIterations);
[ssaPath, ssaFitness] = ssaPathPlanning(startPoint, endPoint, obstacles, numIterations);
% 绘制路径图
figure;
hold on;
plot3DPath(gwoPath, 'b-', 'GWO');
plot3DPath(hhoPath, 'r-', 'HHO');
plot3DPath(cpoPath, 'g-', 'CPO');
plot3DPath(ssaPath, 'm-', 'SSA');
legend('GWO', 'HHO', 'CPO', 'SSA');
title('不同优化算法的路径规划对比');
% 绘制适应度收敛曲线
figure;
hold on;
plot(gwoFitness, 'bo-', 'DisplayName', 'GWO');
plot(hhoFitness, 'r*-', 'DisplayName', 'HHO');
plot(cpoFitness, 'gd-', 'DisplayName', 'CPO');
plot(ssaFitness, 'm^-', 'DisplayName', 'SSA');
xlabel('迭代次数');
ylabel('适应度值');
title('各优化算法的适应度收敛曲线');
legend;
参考文献
❝
Hart, P. E., Nilsson, N. J., & Raphael, B. (1968). A Formal Basis for the Heuristic Determination of Minimum Cost Paths. IEEE Transactions on Systems Science and Cybernetics, 4(2), 100-107.
Bartels, R. H., Beatty, J. C., & Barsky, B. A. (1987). An Introduction to Splines for Use in Computer Graphics and Geometric Modeling. Morgan Kaufmann.
Ruan, Y., Zhang, X., & Li, W. (2018). A and Spline Curve Based Path Planning for UAVs in Complex Terrain*. International Journal of Robotics and Automation, 33(5), 456-463.
(文章内容仅供参考,具体效果以图片为准)
