一、 实验目的
-
理解操作系统核心功能–任务调度,以及调度系统的工作原理
-
实现一个单进程支持多线程的抢占式调度系统
-
实现一个单进程支持多线程的分时调度系统
二、 实验过程
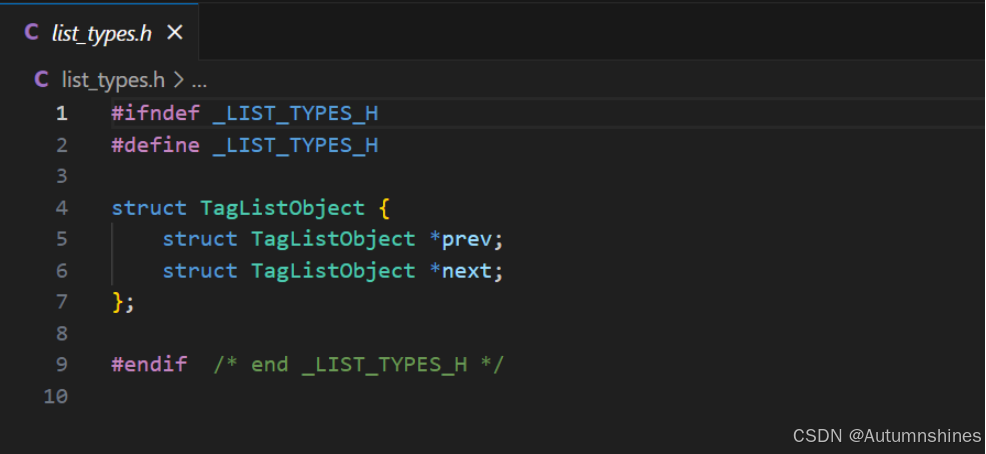
1、实现调度系统的基础数据结构:双向链表
① 在include目录下创建lists_type.h文件,定义双向链表结构
② 在include目录下创建prt_list_external.h ,定义链表的各种相关操作
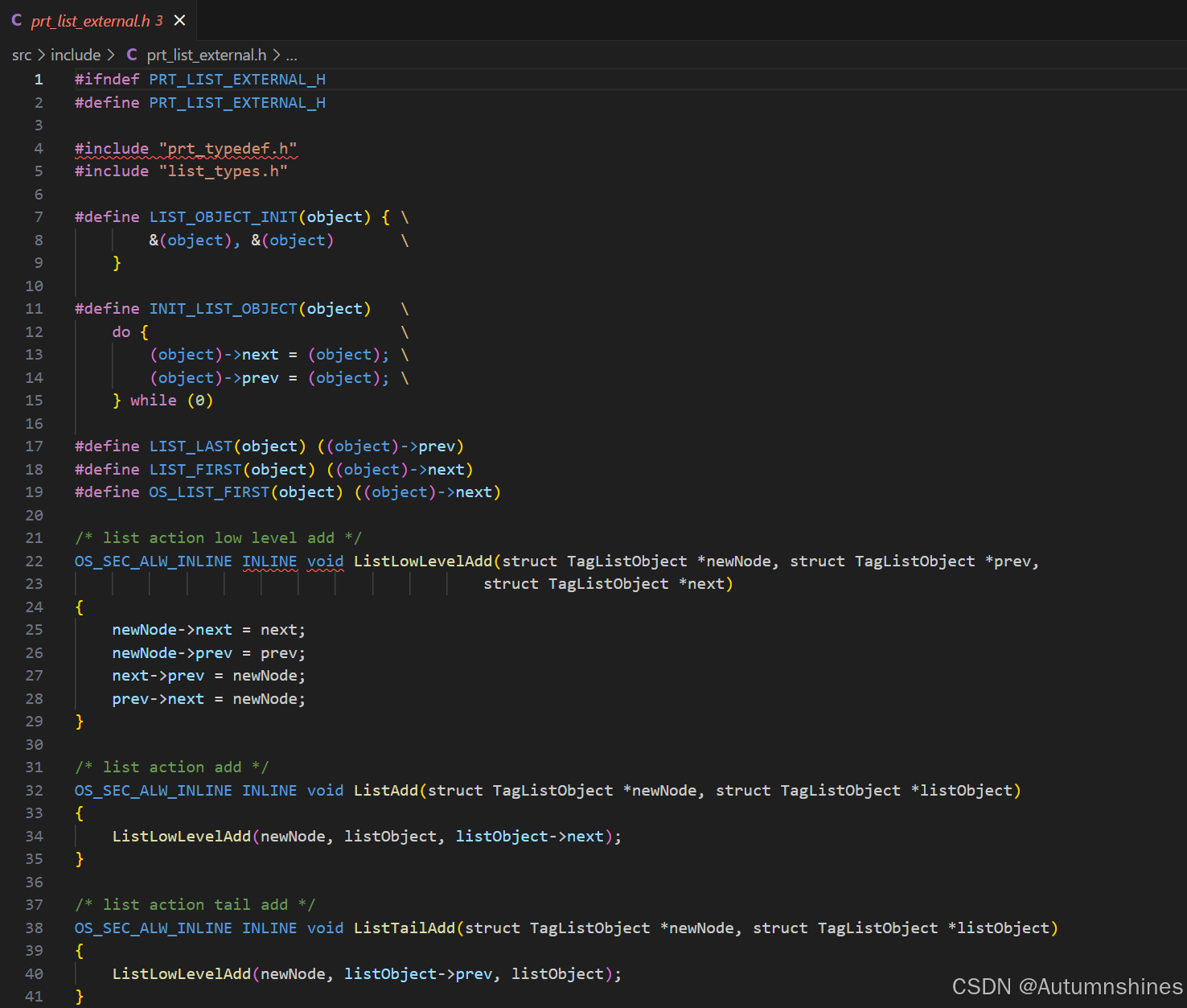
本文件中定义了一系列宏以及链表相关处理函数:
-
ListLowLevelAdd:本函数用于在两个已存在的节点prev和next之间插入一个新的节点newNode。
-
ListAdd:本函数将新的节点newNode添加到链表的头部,即listObject节点的后面。
-
ListTailAdd:此函数将新的节点newNode添加到链表的尾部,即listObject节点的前面。
-
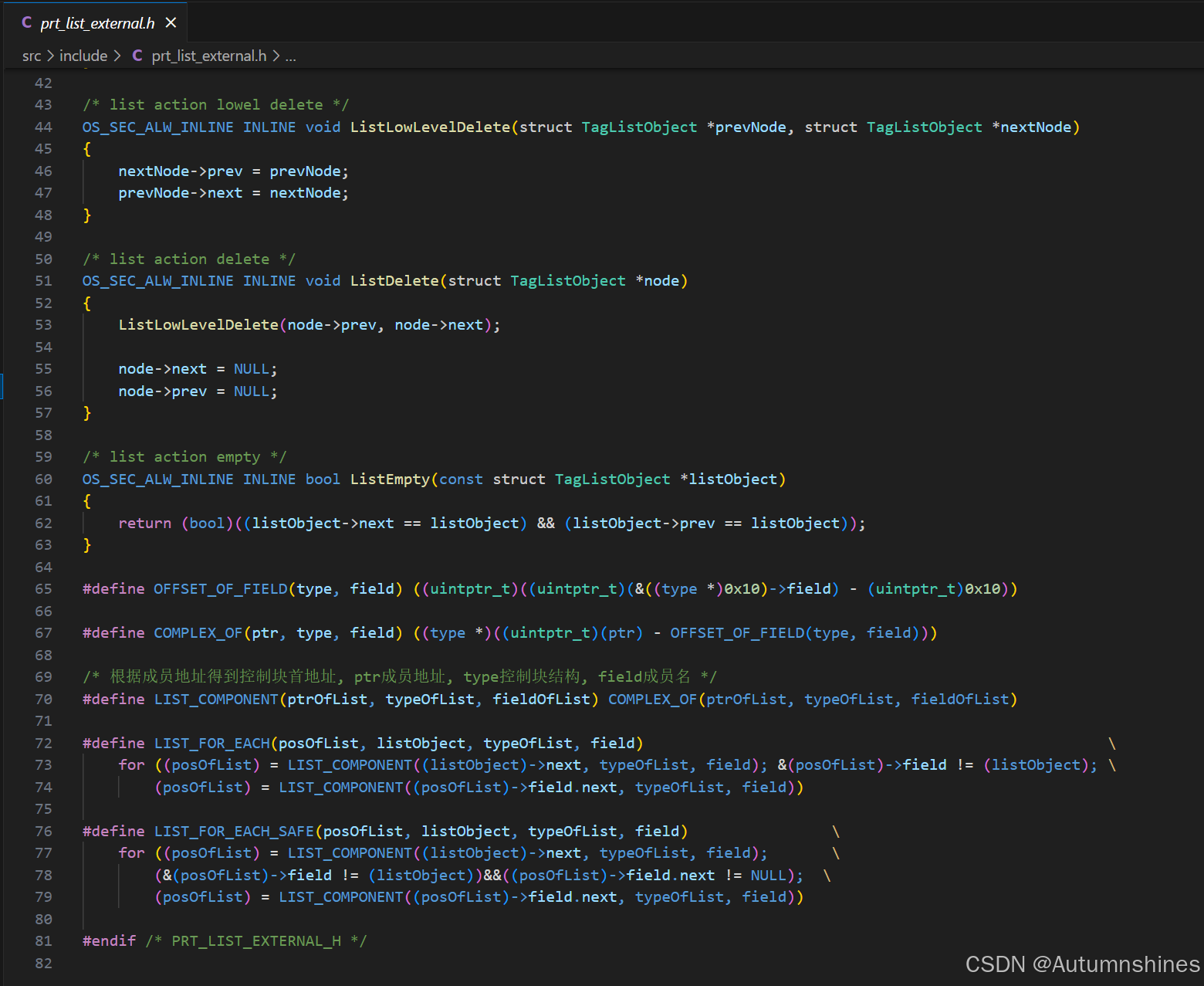
ListLowLevelDelete:这是一个删除函数,用于删除prevNode和nextNode之间的节点。
-
ListDelete:此函数删除指定的节点node,并将它从链表中移除。
-
ListEmpty:本函数检查链表是否为空。通过判断链表的next和prev是否都指向它自己来判断是否为空
-
OFFSET_OF_FIELD:这个宏用于获取结构体成员field在结构体type中的偏移量。
-
COMPLEX_OF:这个宏通过给定的成员field的指针ptr,获取控制块的首地址。(利用成员field的指针ptr减去field在type类型的控制块中的偏移量)
-
LIST_COMPONENT:这个宏是COMPLEX_OF宏的别名,根据成员地址prt获取控制块的首地址。
-
LIST_FOR_EACH和LIST_FOR_EACH_SAFE:这两个宏用于在链表中遍历每一个元素,主要目的在于简化代码。
2、实现调度系统的任务控制块
此处直接按照指导书上在对应目录下创建相应名字的文件,然后复制粘贴即可,下面仅是代码部分片段的分析。
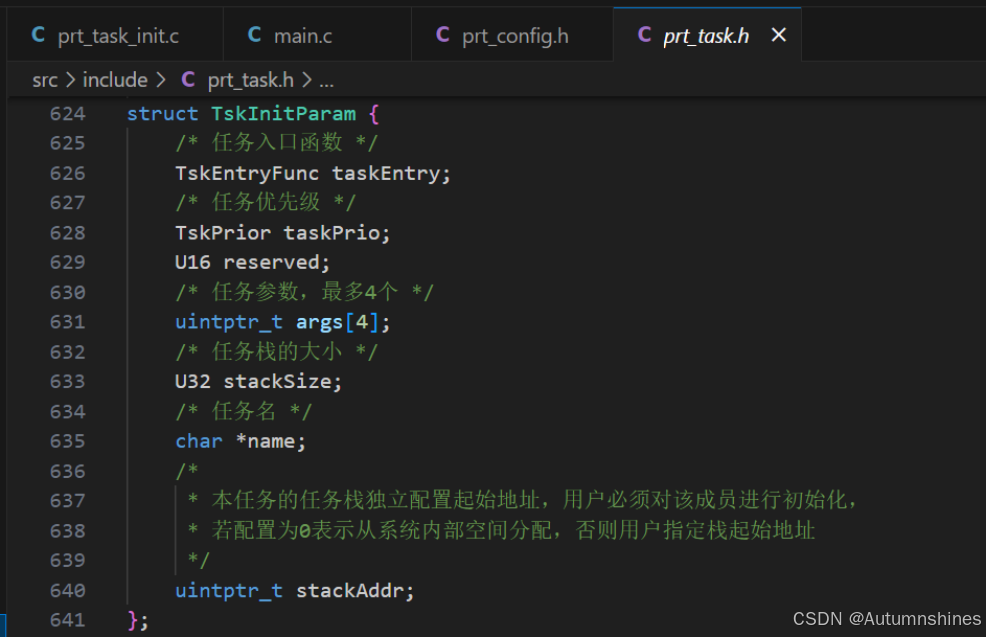
① 在include目录下创建文件prt_task.h,定义了一些相关宏定义以及任务创建时参数传递的结构体: struct TskInitParam。
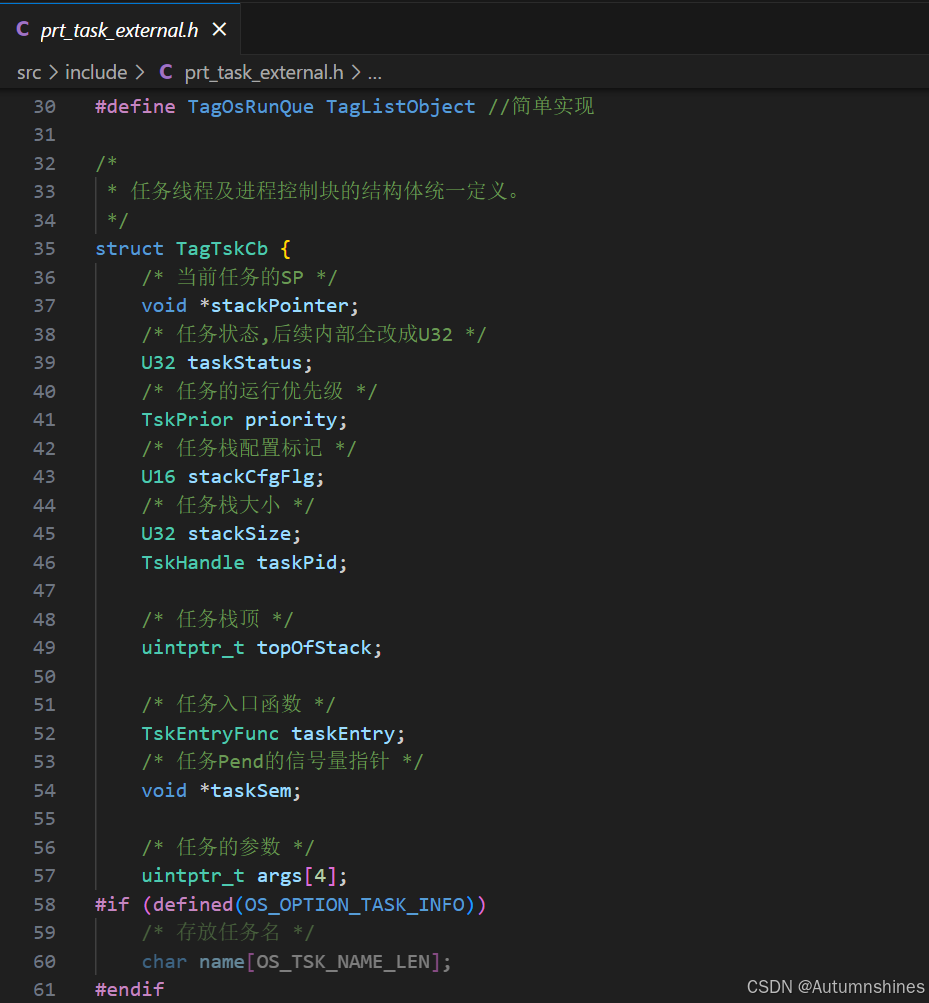
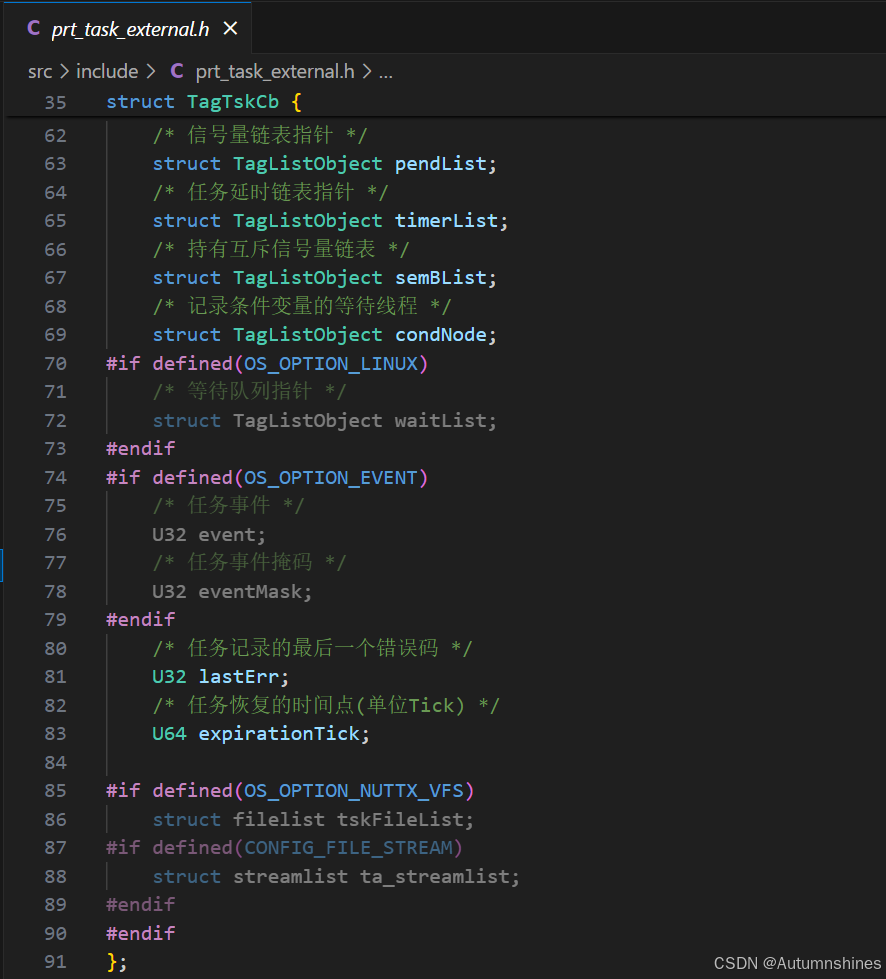
② 在include目录下创建文件prt_task_external.h ,定义任务调度中最重要的数据结构——任务控制块 struct TagTskCb。
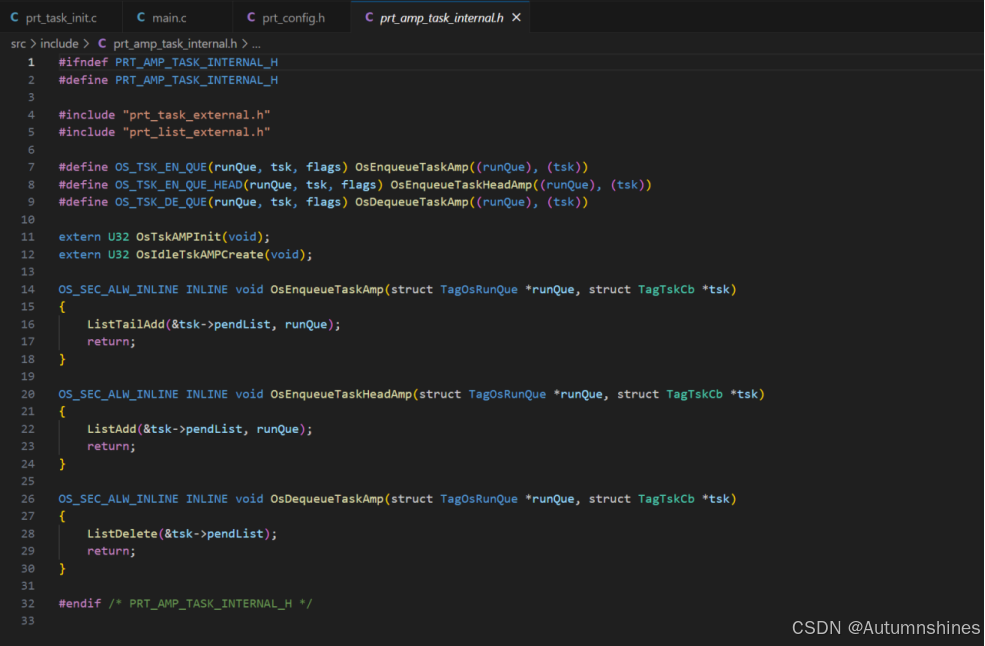
③ 最后在include目录下引入文件prt_amp_task_internal.h,定义了三个内联函数,用于将任务控制块加入运行队列或从运行队列中移除任务控制块。
3、实现调度系统中任务的创建
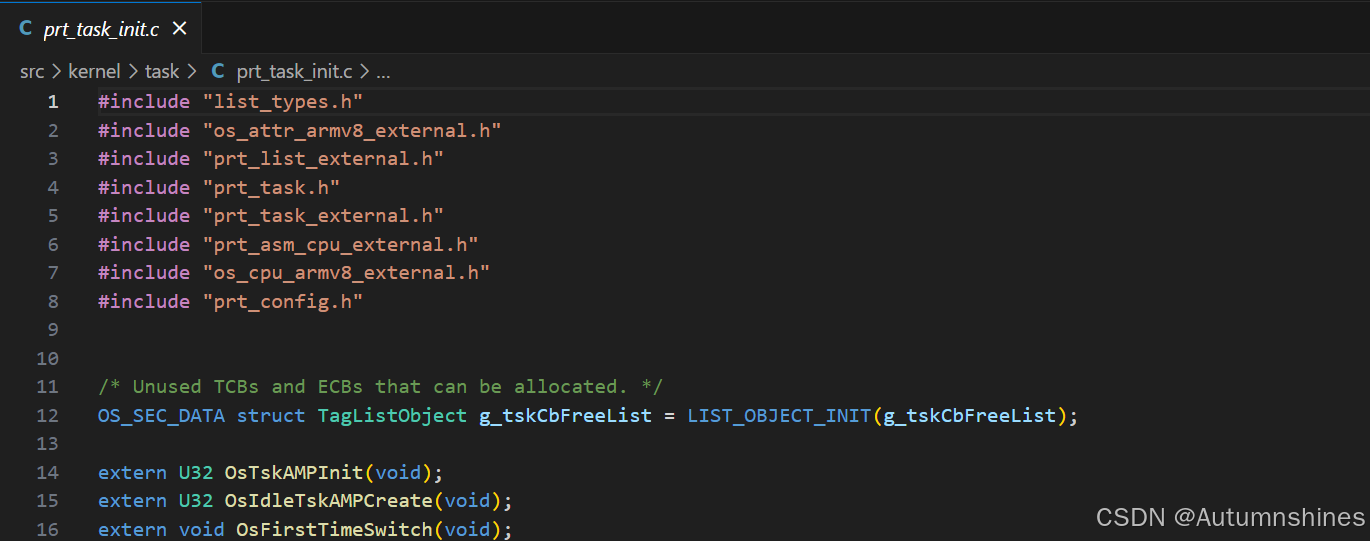
在src/kernel/task目录下创建文件prt_task_init.c,用于实现任务创建代码(下文代码如果没有明确说明所在文件,均在此文件中,某些代码段开头有// src/core/kernel/task/prt_task_internal.h之类的注释,部分同学可能会误以为是代码对应的位置,导致最后程序报错并且难以找到原因。)
① 相关变量与函数声明
② 极简内存空间管理

③ 任务栈初始化
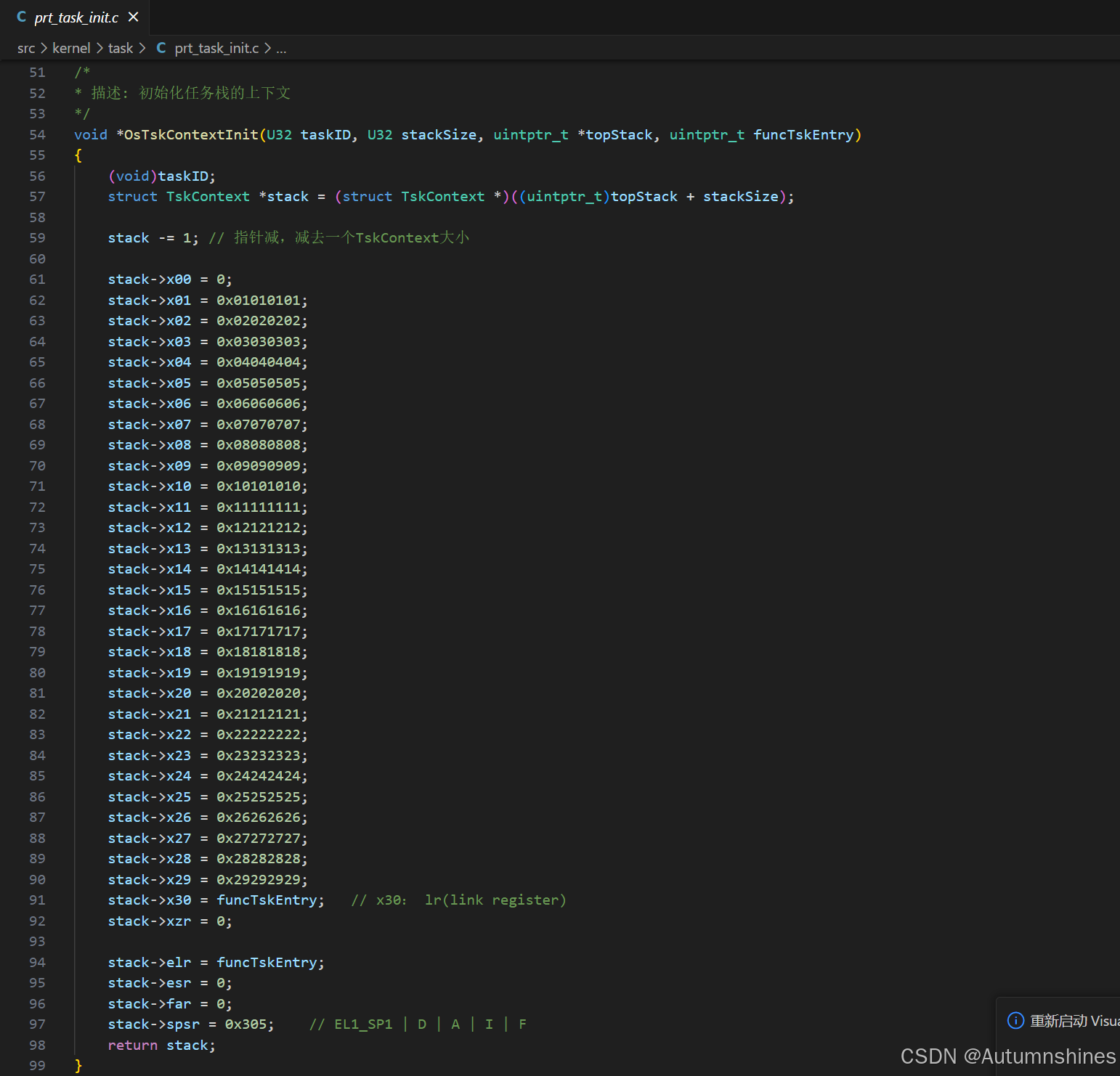
根据课程《操作系统》的相关学习,了解到当发生任务切换时,会产生上下文的恢复与保存,而当任务第一次执行时,内核栈是空的,无法进行上下文的恢复,因此我们需要先在内核栈中放置第一个任务的上下文内容,从而进行上下文恢复,此处最重要的是寄存器x30以及spsr(异常发生时的程序状态)的值。
④ 在include目录下的文件os_cpu_armv8.h加入任务上下文结构体TskContext的定义
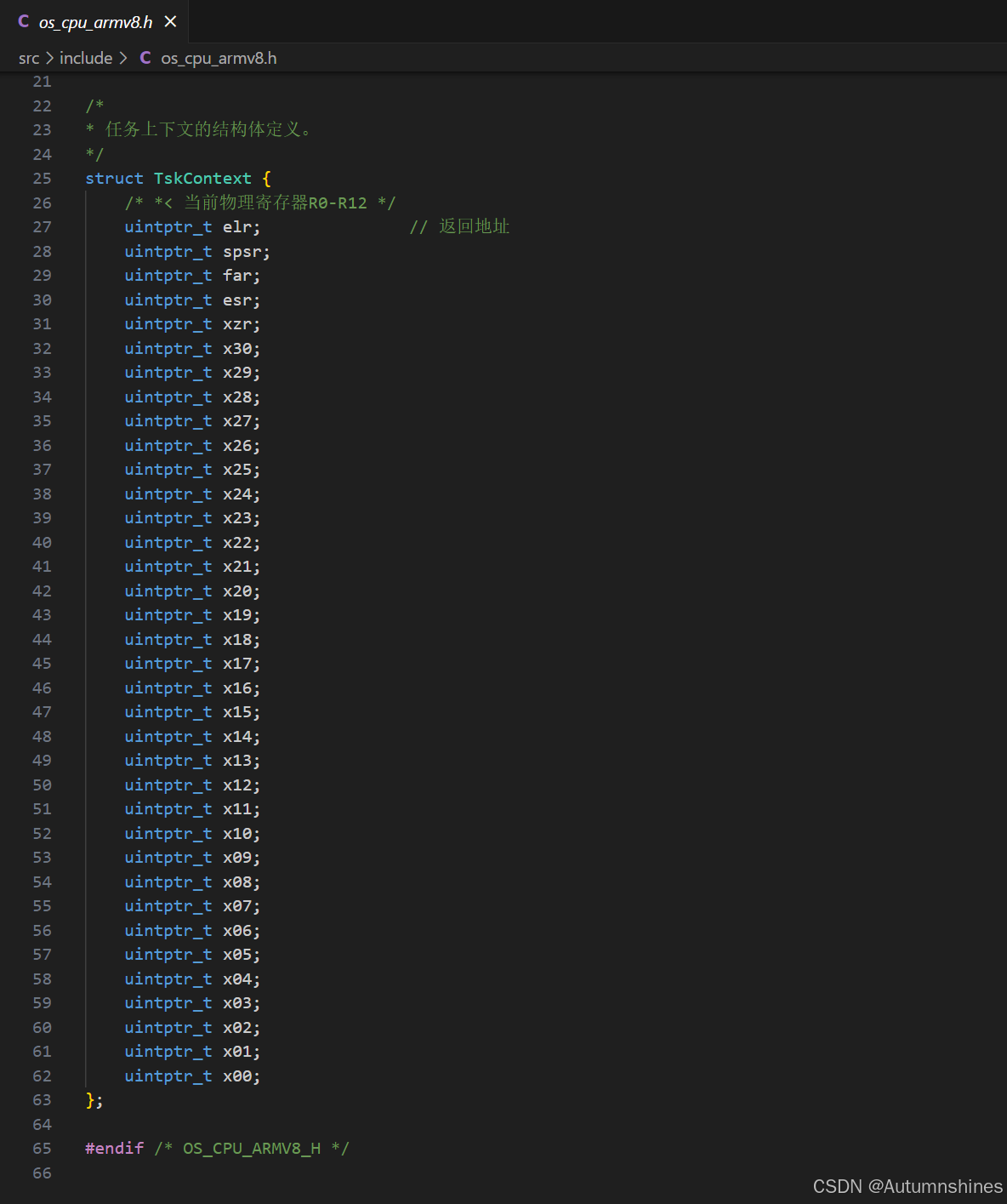
此处原先应该是在bsp目录下的文件os_cpu_armv8.h中被定义,但是由于上一个实验在include目录下定义了同名文件os_cpu_armv8.h,此处将二者合并,将上下文结构体定义在include目录下的os_cpu_armv8.h中
⑤ 实现任务入口函数
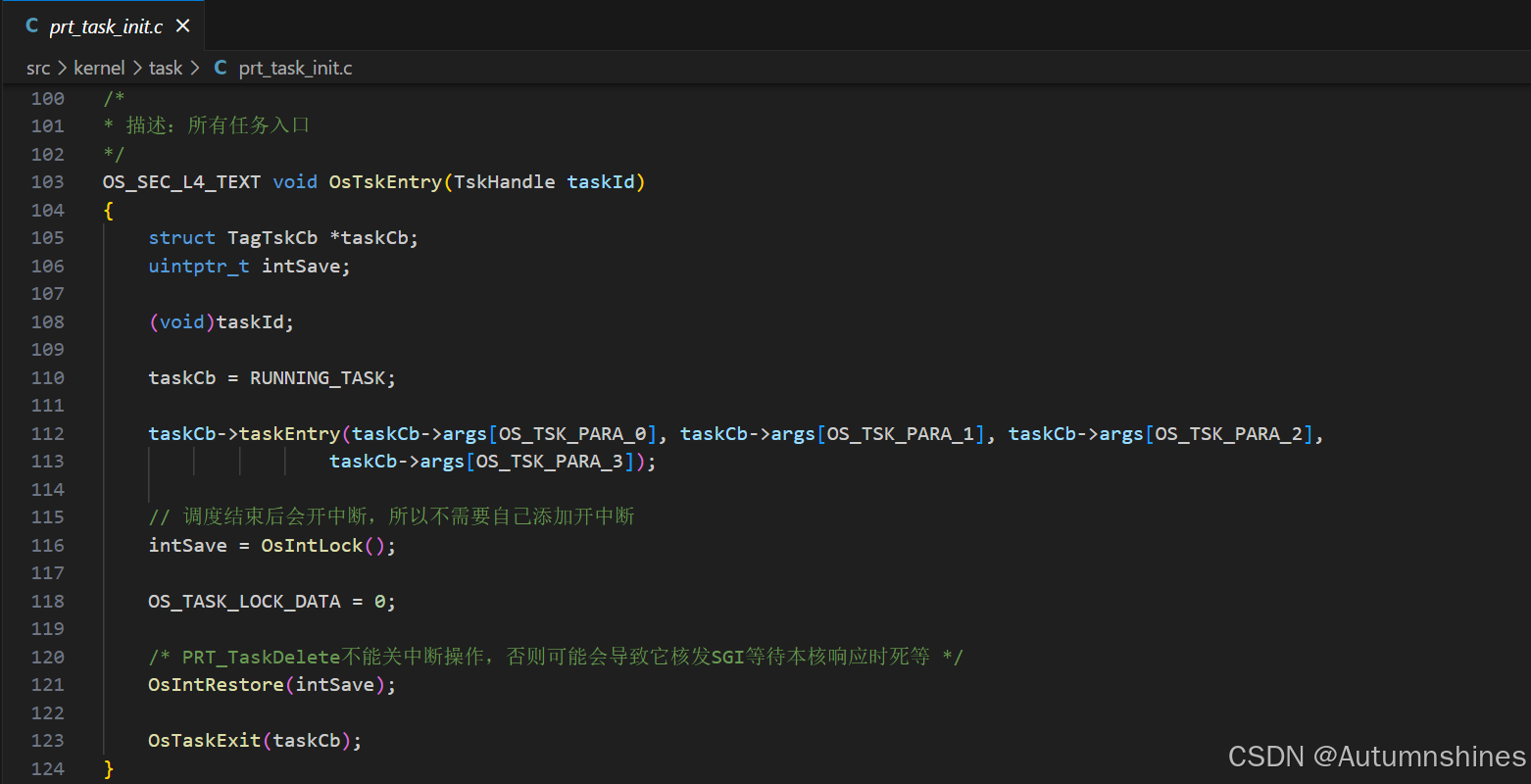
在任务入口函数中,首先定义了该任务的TCB任务控制块,然后关闭中断,以防止在任务调度过程中产生中断,同时用intSave保存中断状态,待调度结束后恢复原来的中断状态,当调度完成后,调用OsTaskExit函数释放TCB资源。纵观整个调度系统,找不到类似 OsTskEntry(taskId)这样的对 OsTskEntry进行的函数调用。事实是在通过 OsTskContextInit 函数进行栈初始化时传入,即任务第一次就绪运行时会进入OsTskEntry执行,这也符合任务入口函数的定义。
⑥ 实现任务创建
注意:这段代码的开头就是前文提到的可能致误的注释
对任务创建的函数进行分析:
-
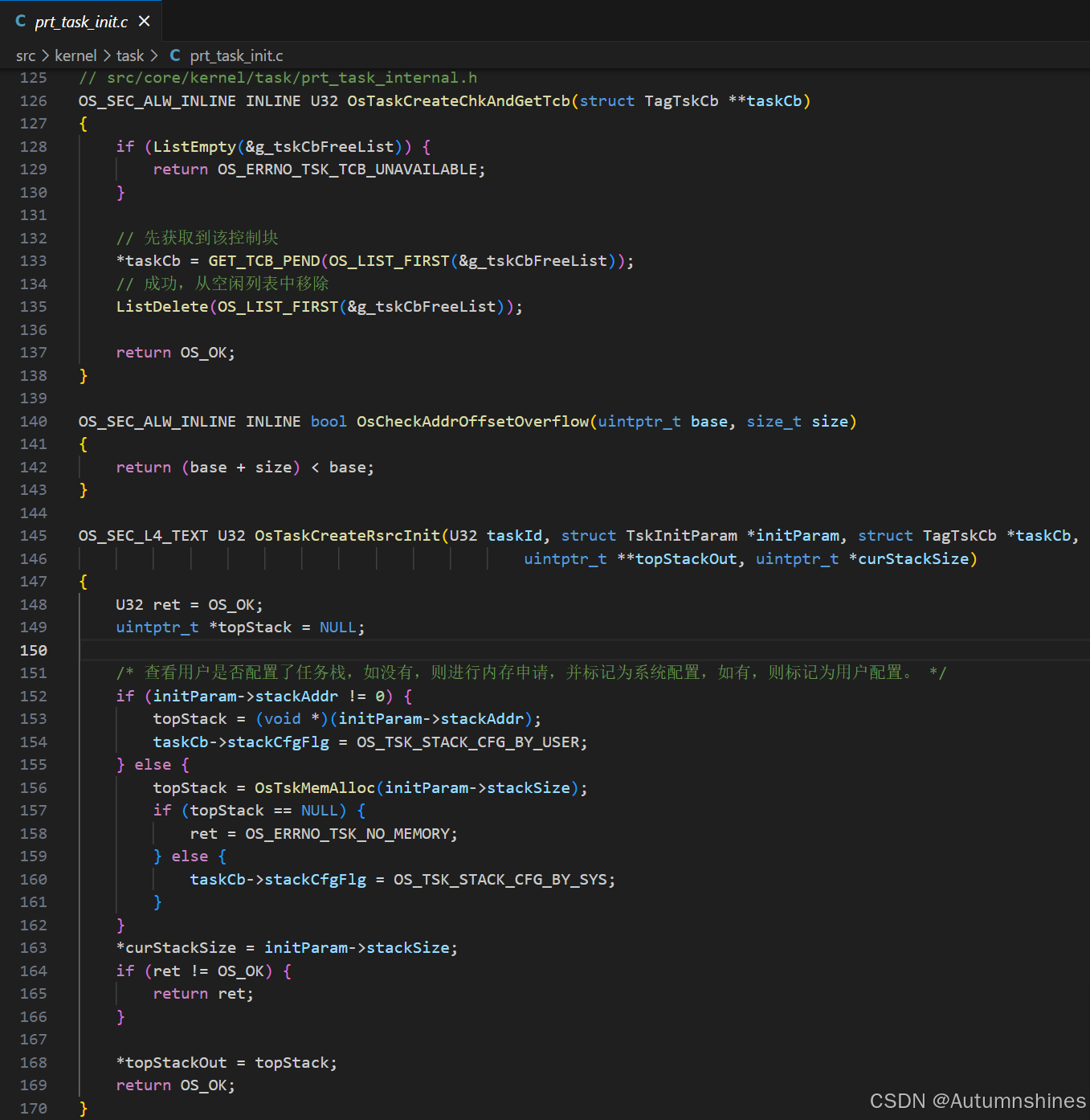
OsTaskCreateChkAndGetTcb 函数:检查空闲链表中是否还有任务块,如果有则从空闲链表 g_tskCbFreeList 中取出一个任务控制块,然后将该任务块从空闲链表中去除;
-
OsCheckAddrOffsetOverflow:检查地址加上分配大小是否会导致地址溢出。
-
OsTaskCreateRsrcInit函数:初始化任务资源。如果用户已经设置了任务栈,就使用用户配置的栈,否则通过 OsTskMemAlloc 为新建的任务分配堆栈空间。此函数返回任务栈的顶部地址和大小;
-
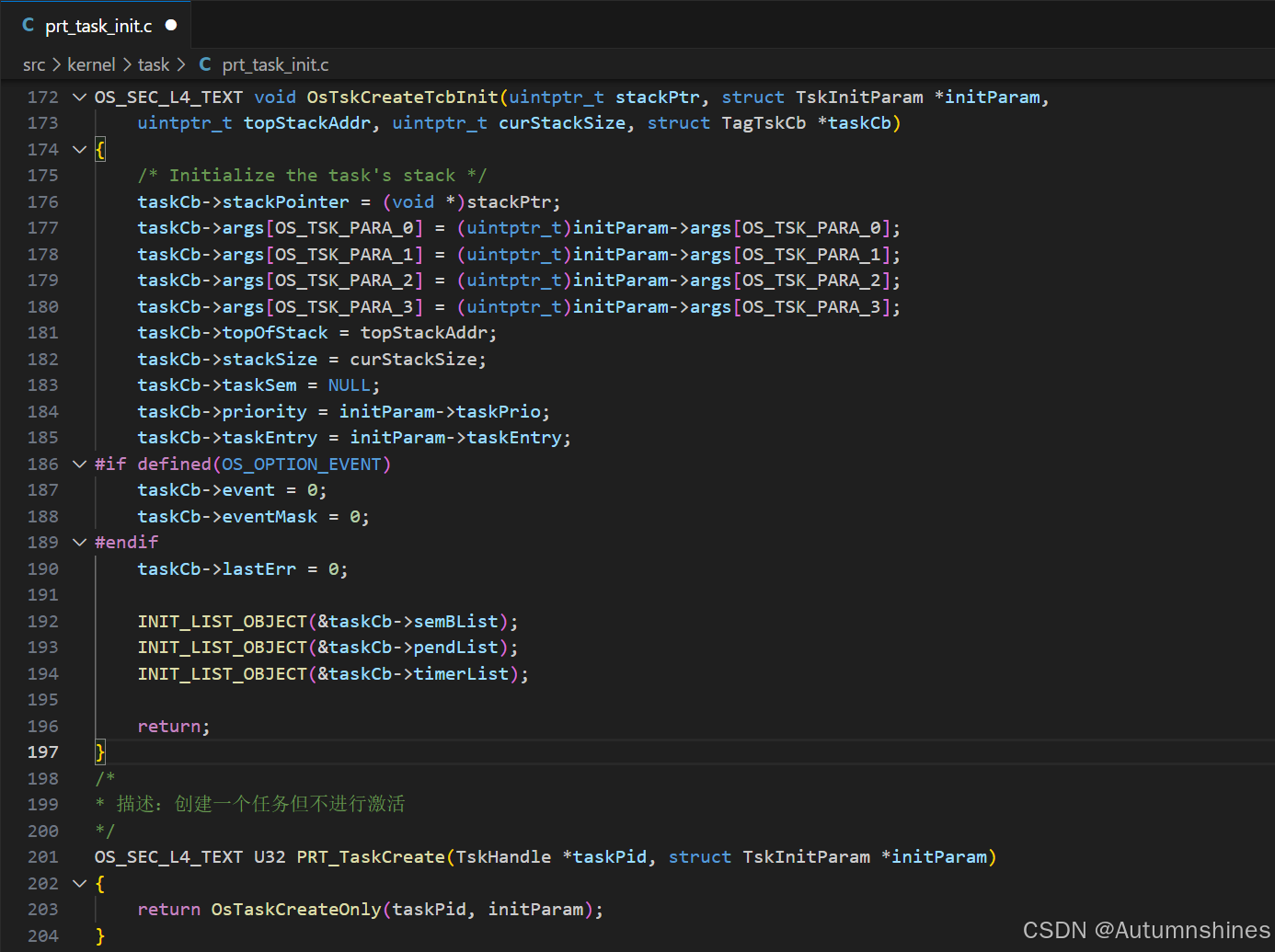
OsTskCreateTcbInit:初始化任务控制块TCB。设置任务的栈指针,参数,栈的顶部地址和大小,优先级,入口函数等信息。
-
创建一个任务:首先获取一个空闲的任务控制块,然后初始化任务资源,初始化任务控制块,最后设置任务状态为挂起,并返回任务ID(并不激活此任务)
-
OsTskContextInit 函数负责将栈初始化成刚刚发生过中断一样;
-
PRT_TaskCreate:这是一个简单封装函数,调用OsTaskCreateOnly函数
⑦ 实现解挂任务
下面对此部分的函数进行分析:
-
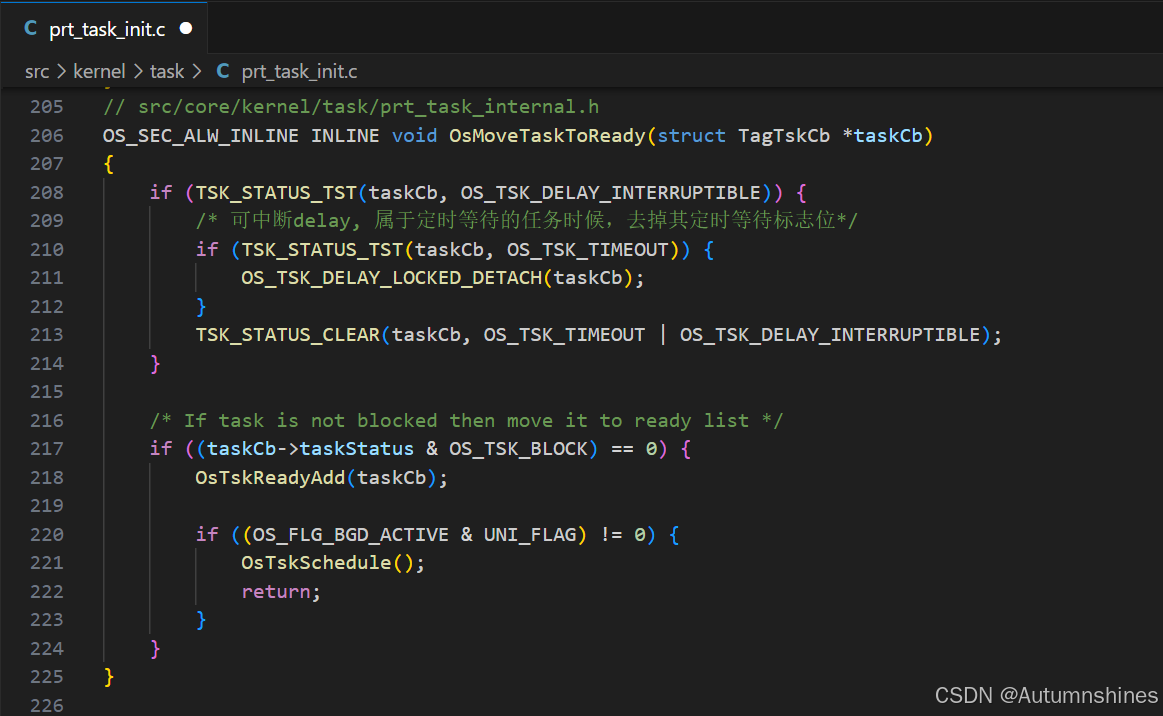
OsMoveTaskToReady: 此函数首先进行判断,如果任务处于可中断延迟状态并且超时,它会清除任务的延迟等待标志位,然后如果任务没有被阻塞,则将任务添加到就绪列表,同时检查UNI_FLAG中的OS_FLG_BGD_ACTIVE位是否被设置,若设置则引发调度程序。
-
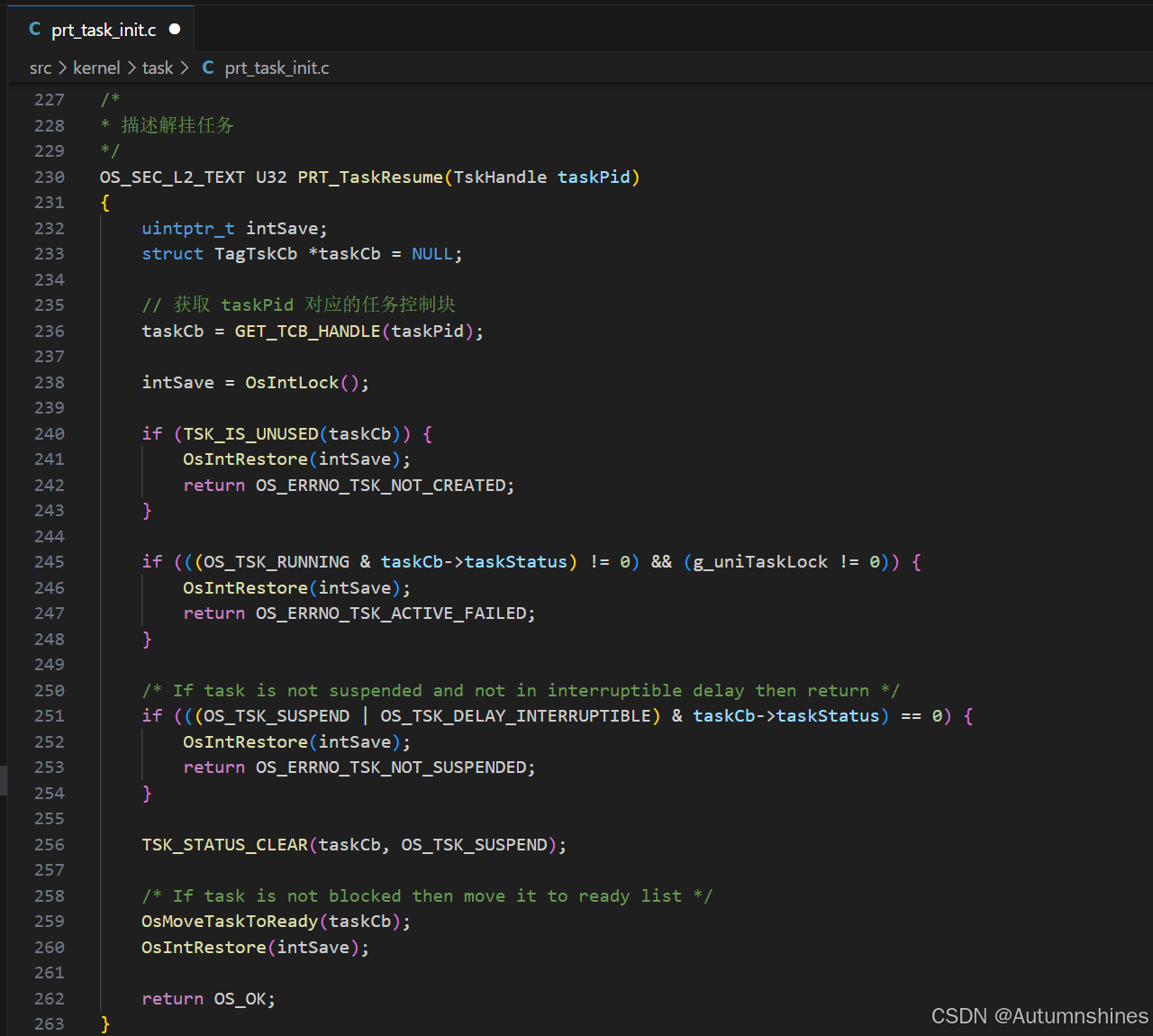
PRT_TaskResume: 此函数首先获取指定任务的控制块,然后检查任务是否正在使用。如果任务未创建或者正在运行且任务锁定,函数返回错误。如果任务没有被挂起或处于可中断延迟状态,函数同样返回错误。如果函数没有返回错误,则正常清除任务的挂起状态,并调用OsMoveTaskToReady将任务移到就绪列表。
⑧ 任务管理系统的初始化与启动
对该模块进行分析:
-
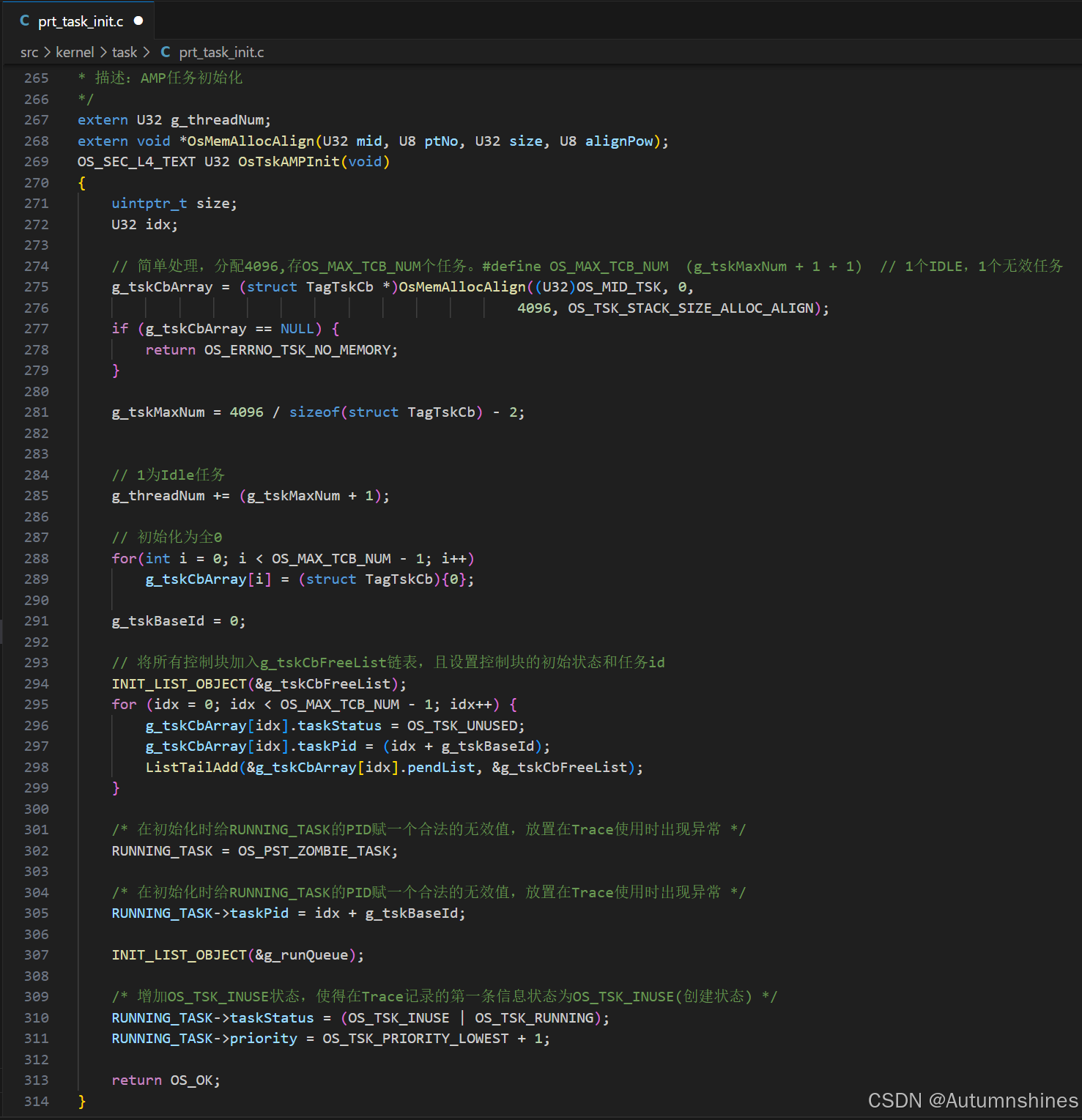
OsTskAMPInit: 这个AMP任务初始化函数首先分配了4096字节的内存用于存储TCB任务控制块数组,每个TCB用于存储一个任务的信息,同时任务和TCB的一一映射关系也表明数组中的元素个数即为任务的最大个数(减2的目的是预留一个空闲任务块、一个无效任务块)。然后将所有的任务控制块加入到空闲列表,并设置每个任务控制块的初始状态和任务ID,同时给RUNNING_TASK的PID赋一个合法的无效值,防止在Trace使用时出现异常,然后增加OS_TSK_INUSE状态,使得在Trace记录的第一条信息状态为OS_TSK_INUSE。最后,初始化运行队列,并设置了当前运行任务的状态和优先级。
-
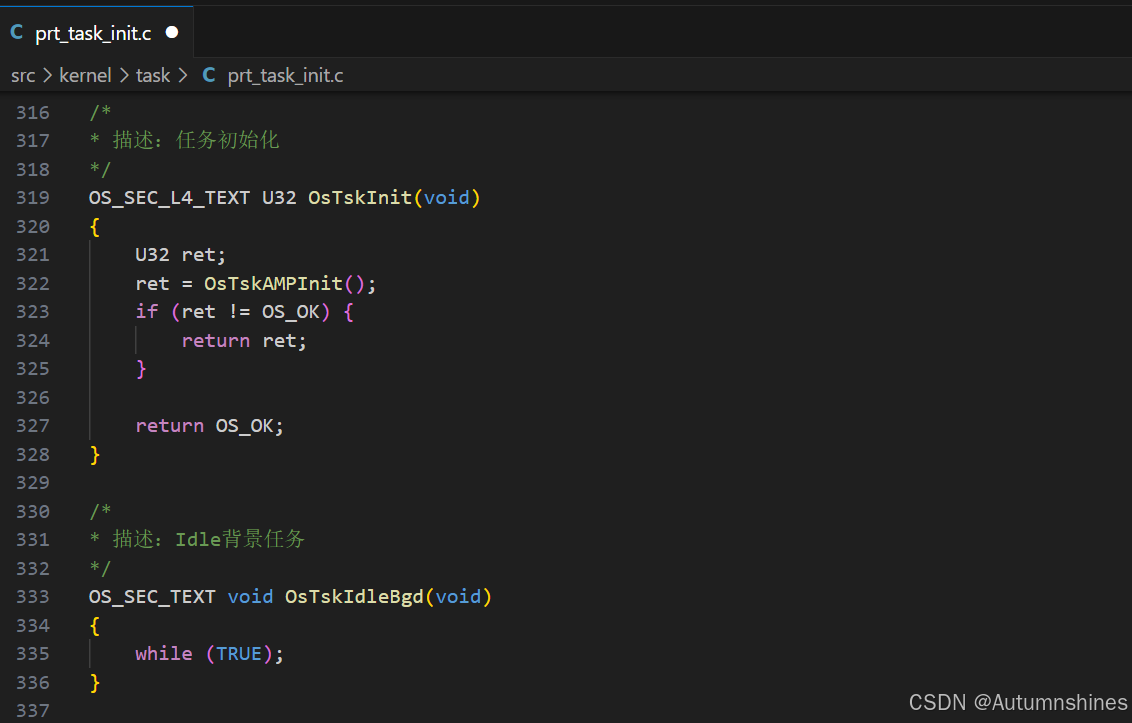
OsTskInit: 本函数是一个封装函数,调用OsTskAMPInit进行AMP任务的初始化,如果初始化成功则返回OS_OK。
-
OsTskIdleBgd: 本函数定义了Idle的操作:执行空循环,当系统没有其他任务需要运行时,会执行空闲任务IDLE。
-
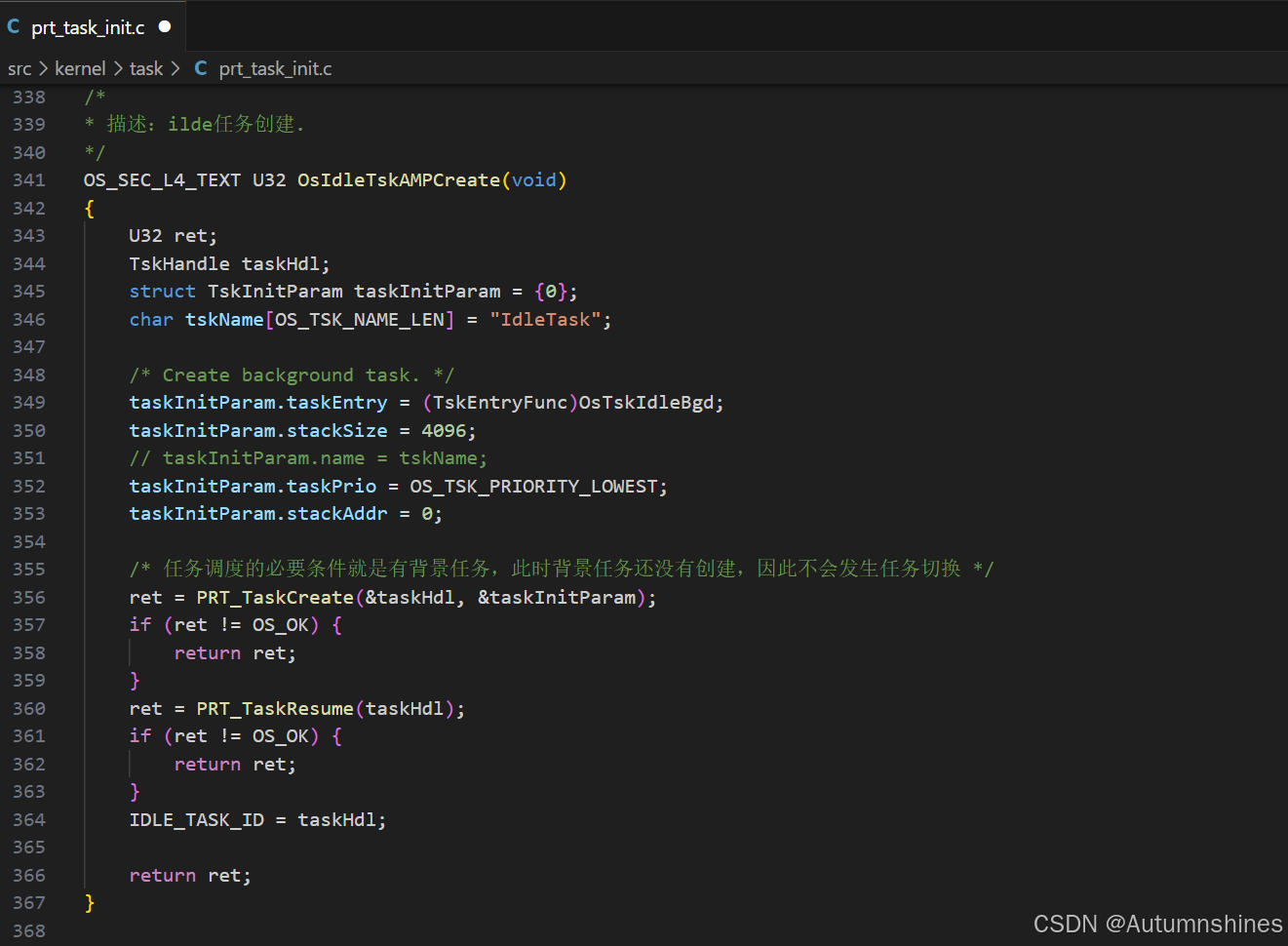
OsIdleTskAMPCreate: 本函数用于创建IDLE空闲任务,其首先设置了任务的参数,包括任务的入口函数、堆栈大小、优先级等,然后创建任务,并恢复(或解挂)这个任务。最后,将任务的ID保存到IDLE_TASK_ID。
-
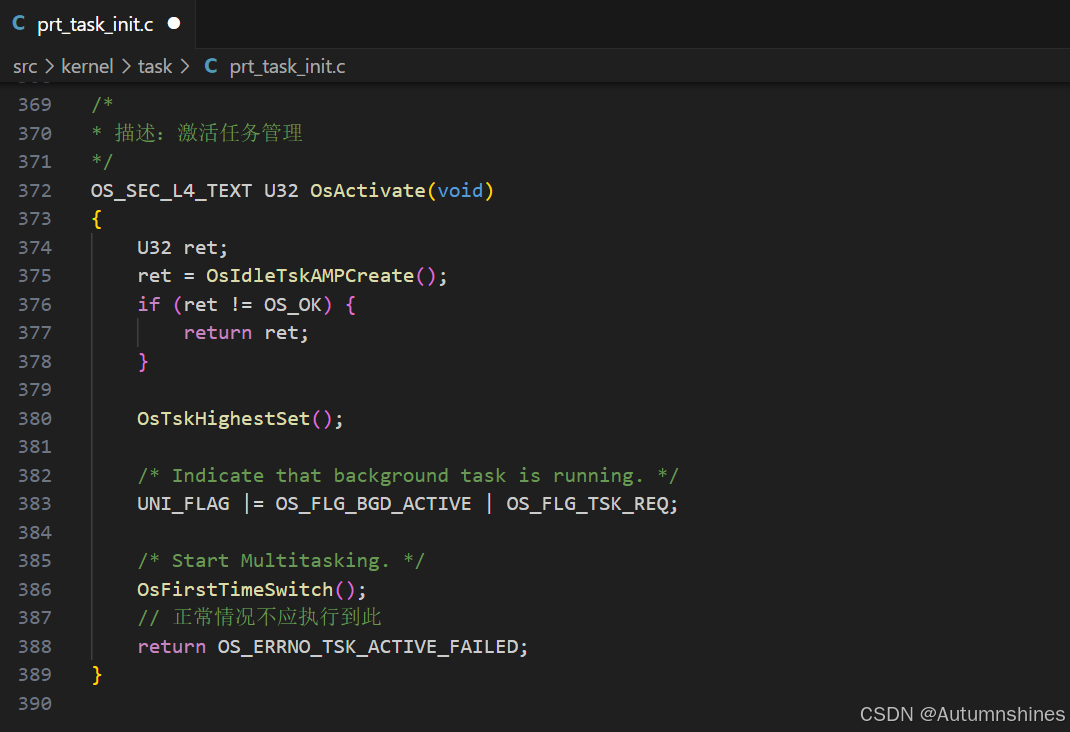
OsActivate: 本函数用于激活任务管理函数,其首先调用 OsIdleTskAMPCreate 函数创建IDLE任务,使系统在没有任务就绪时运行IDLE空闲任务,然后调用OsTskHighestSet 函数,在就绪队列中查找最高优先级任务并将 g_highestTask 指针指向该任务,设置最高优先级的任务,同时标记背景任务正在运行,并开始执行多任务管理。(如果函数能够正常返回,说明任务调度出现了问题)
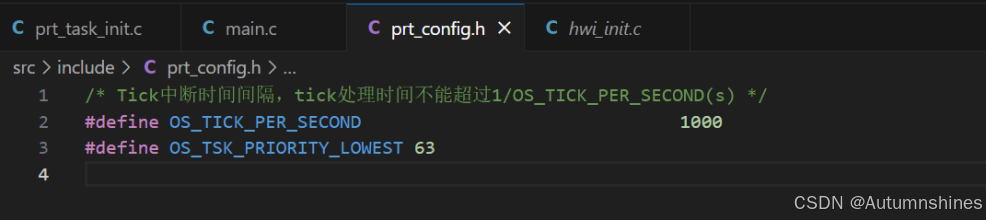
⑨ 在include目录下的文件prt_config.h 中加入空闲任务优先级定义
4、 任务状态转换
在 src/kernel/task中创建文件prt_task.c:
相关函数的分析:
-
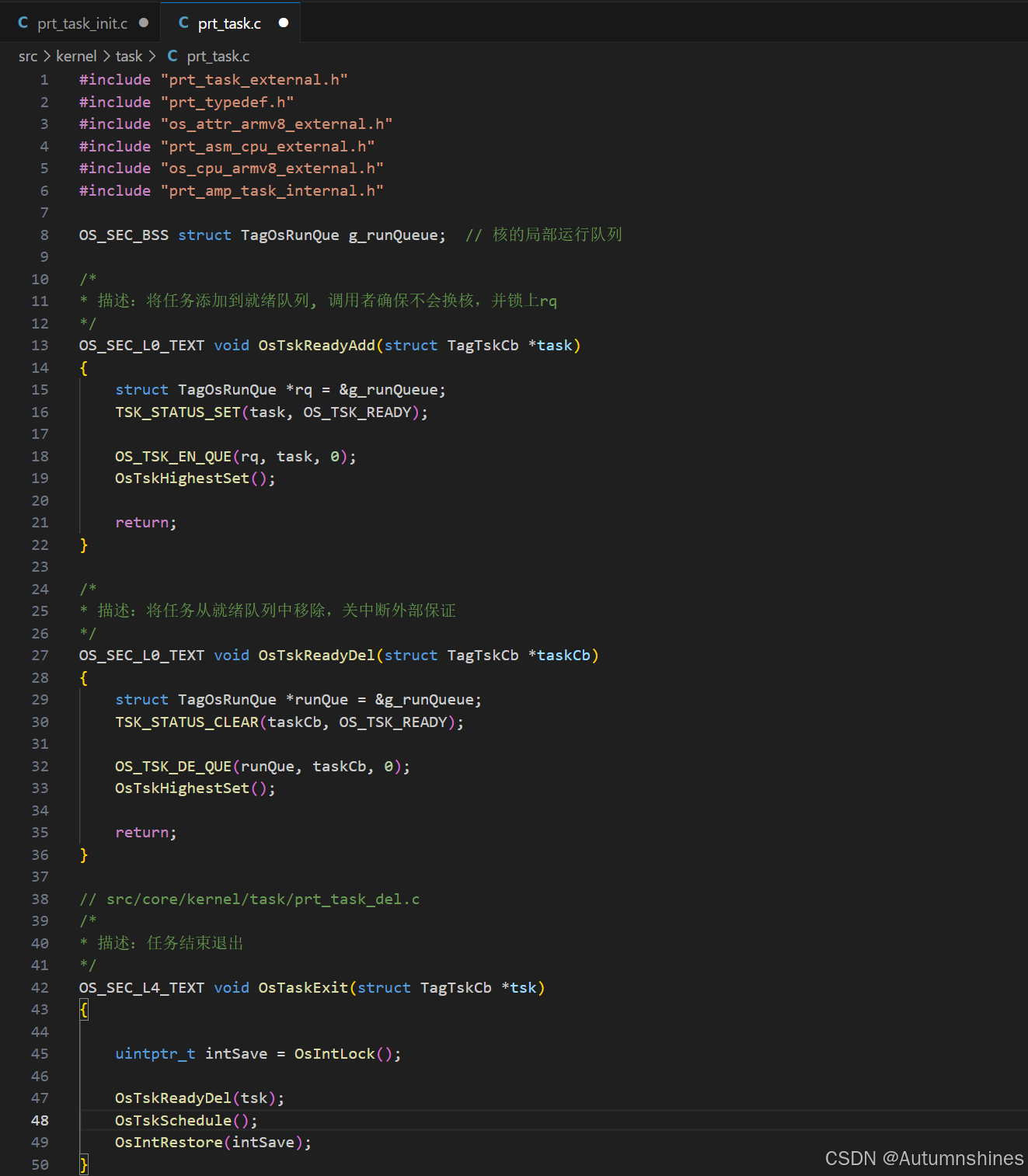
OsTskReadyAdd:本函数实现将一个任务添加到就绪队列中(与上文的另一个就绪添加函数相比,免去了一系列判断条件),它首先获取全局运行队列g_runQueue,然后设置任务的状态为就绪 (OS_TSK_READY),并把任务添加到运行队列中,最后调用OsTskHighestSet()将g_highestTask 指针指向最高优先级任务(每当就绪队列中的任务发生变化时,要重新找到当前最高优先级的任务)。
-
OsTskReadyDel:本函数实现将一个任务从就绪队列中移除,与添加函数相同,首先获取全局运行队列g_runQueue,然后清除任务的就绪状态 (OS_TSK_READY),并从运行队列中移除该任务。最后,它同样调用OsTskHighestSet()将g_highestTask 指针指向最高优先级任务。
-
OsTaskExit: 本函数实现任务退出,其首先锁定中断(防止退出过程引发中断),然后调用OsTskReadyDel()将任务从就绪队列中移除,最后调用OsTskSchedule()进行任务调度(因为一个任务运行结束之后,需要陷入操作系统来引发调度),最后恢复中断。
5、实现调度与切换
① 在src/kernel/sched目录下创建文件prt_sched_single.c
下面分析本文件中相关函数的功能:
-
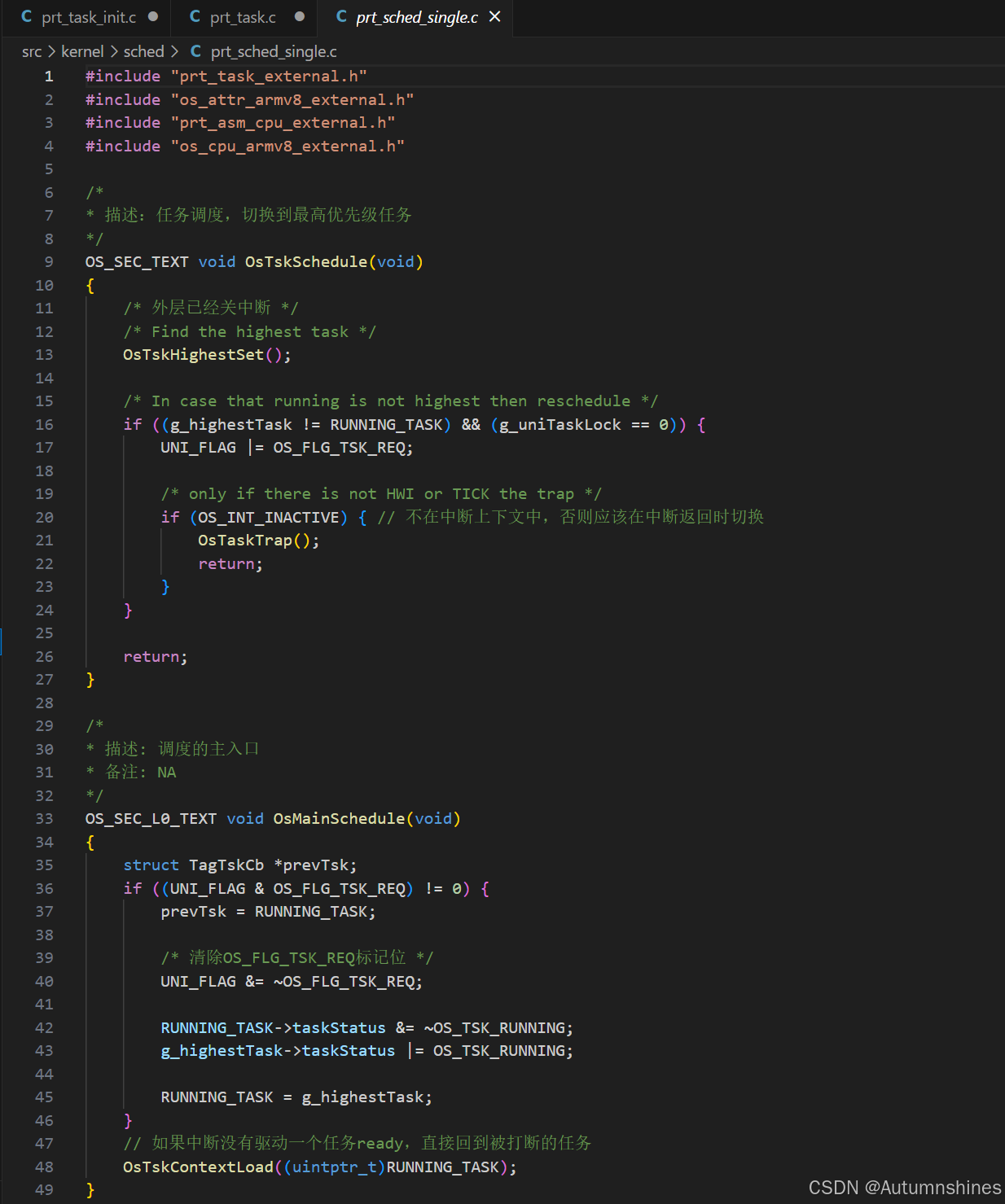
OsTskSchedule函数:本函数函数实现任务调度,首先调用OsTskHighestSet来设置g_highestTask 指针指向最高优先级任务,如果当前运行的任务不是最高优先级的任务,并且没有被锁定,就设置一个标志位,请求任务调度。如果当前不在中断上下文中,就调用OsTaskTrap来进行任务切换,否则就需要等待中断历程结束后才能进行任务切换。
-
OsMainSchedule函数:本函数是任务调度的主入口,当有任务调度请求时(检查标志位OS_FLG_TSK_REQ),会保存当前运行的任务,清除任务调度请求标志位,然后更新任务的状态,并切换到最高优先级的任务,最后调用OsTskContextLoad加载新的任务上下文。
-
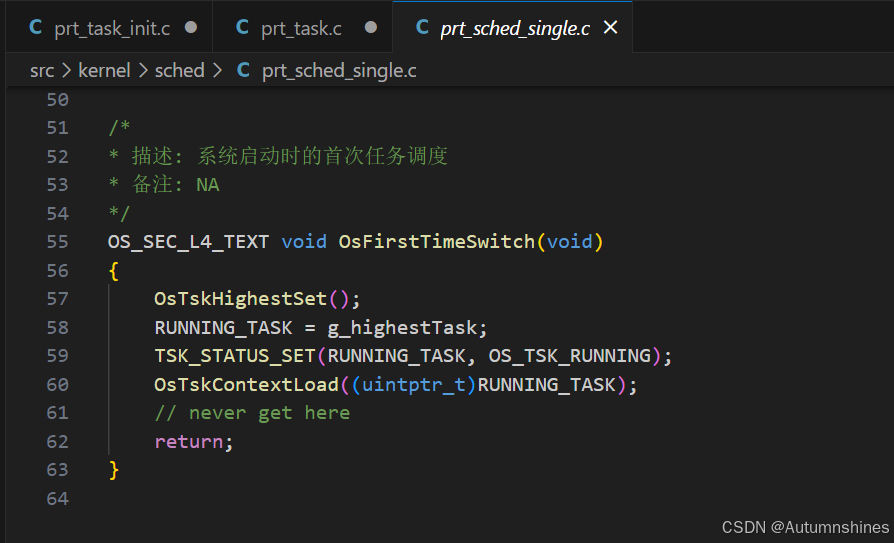
OsFirstTimeSwitch函数:本函数是系统启动时的首次任务调度,首先调用OsTskHighestSet设置g_highestTask 指针指向最高优先级任务,然后设置当前运行的任务为最高优先级的任务,并设置任务状态为运行。最后,调用OsTskContextLoad加载新的任务上下文。
② 在src/include/prt_task_external.h 中定义内联函数OsTskHighestSet 函数
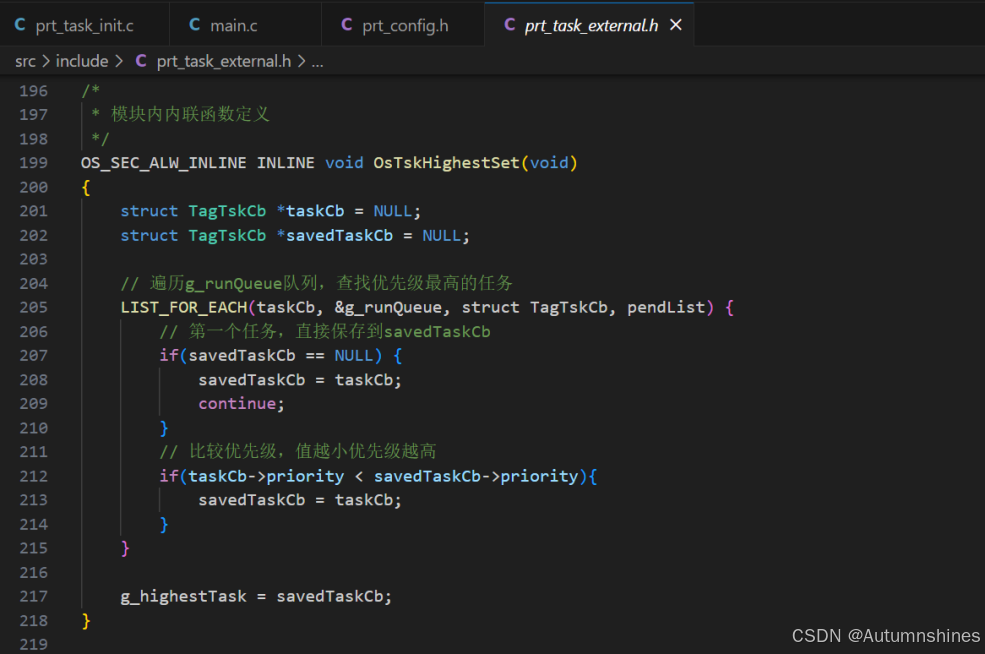
本函数在前文也已经使用,即遍历整个g_runQueue队列,查找最高优先级任务并将 g_highestTask 指针指向该任务,此处定义为内联函数可以提高性能。
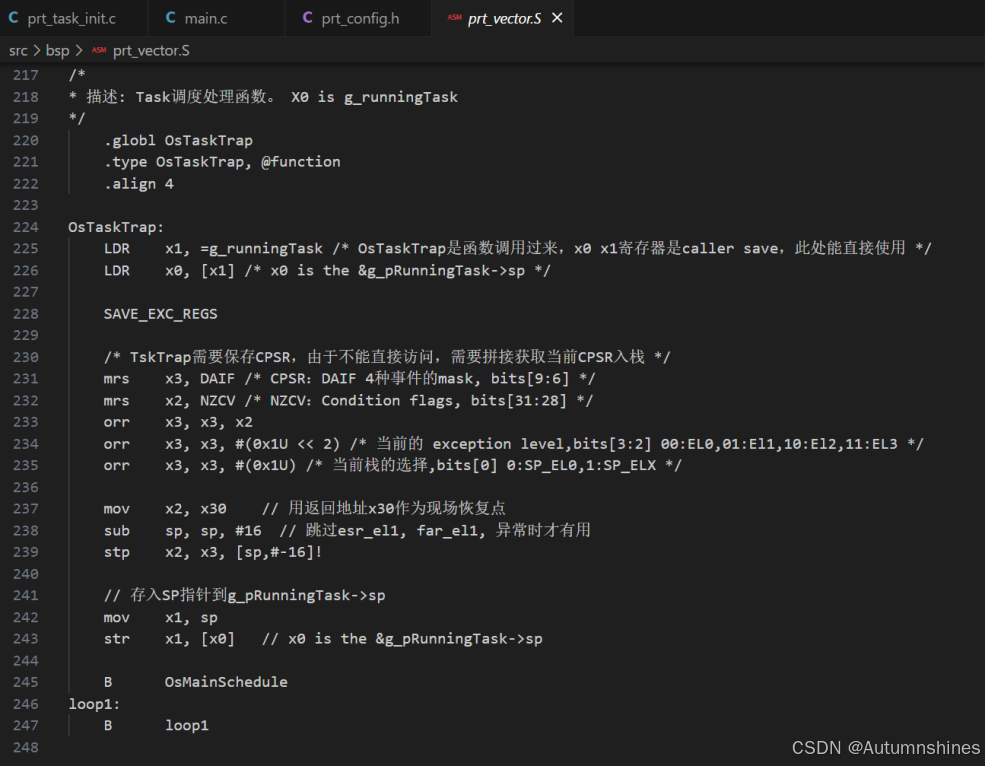
③ 在 src/bsp目录下创建文件prt_vector.S,实现OsTskContextLoad,OsContextLoad 和 OsTaskTrap。
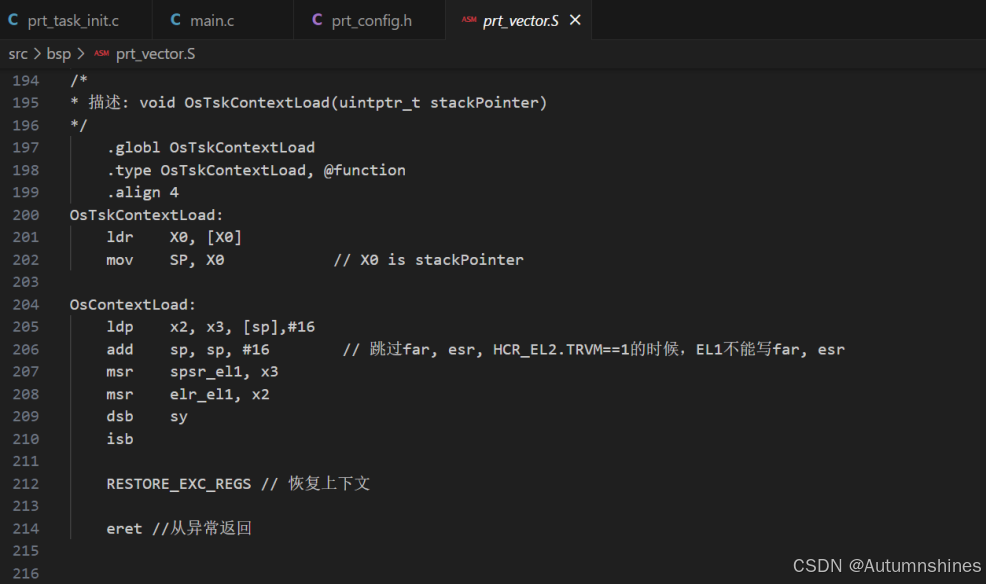
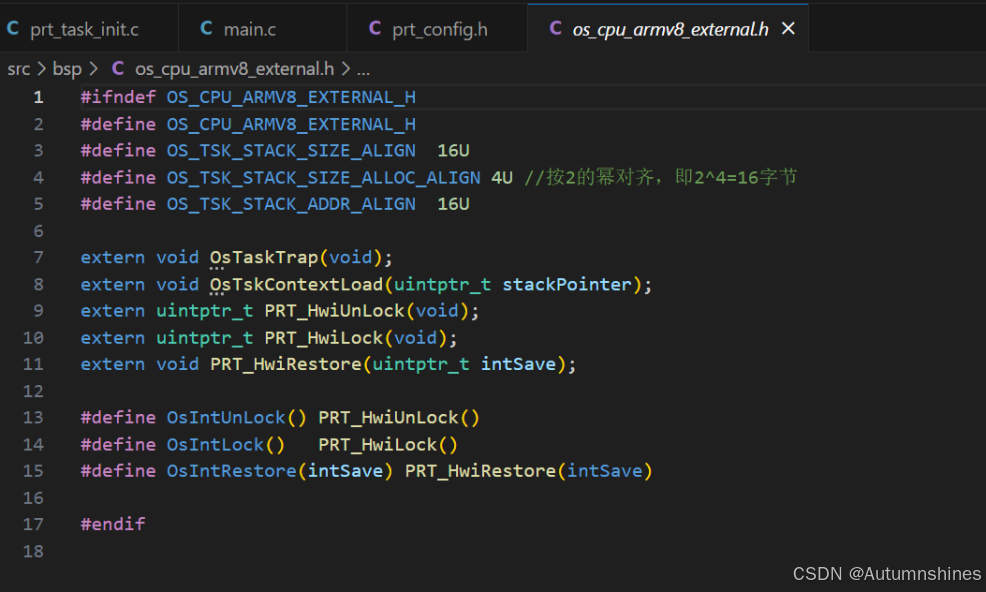
④ 在 src/bsp目录下的文件os_cpu_armv8_external.h加入 OsTaskTrap和OsTskContextLoad 的声明和关于栈地址和大小对齐宏。
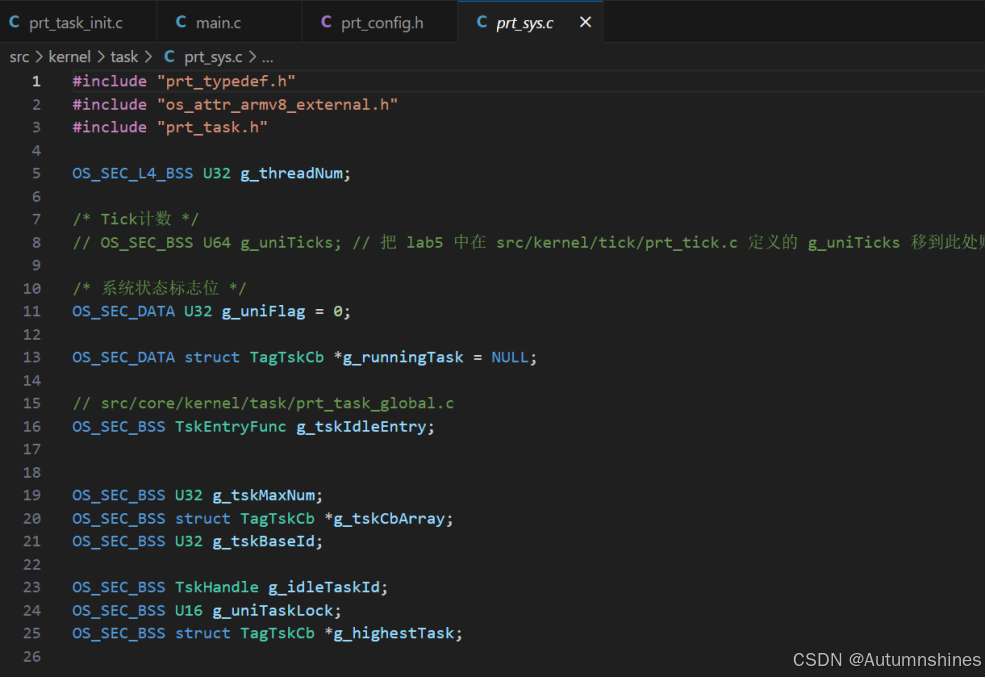
⑤ 最后在 src/kernel/task目录下的文件prt_sys.c中定义内核的各种全局数据,至此,调度系统构建完成
三、 测试及分析
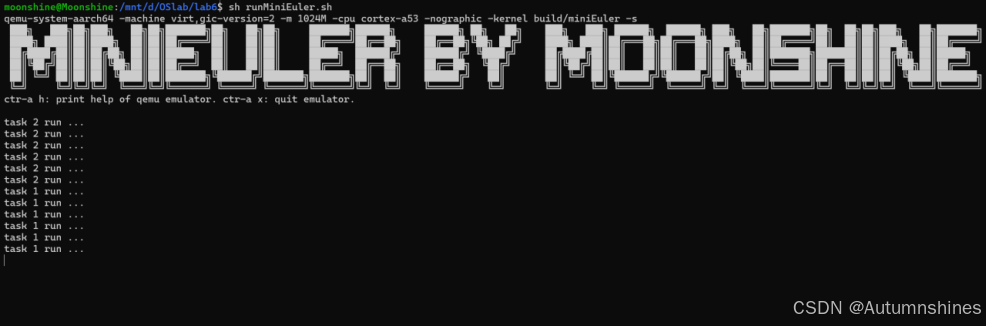
运行测试抢占式调度系统的任务调度,发现正常进行:
四、 Lab6作业
实现分时调度系统:
这里通过两种方法实现了分时调度,先介绍第一种较为取巧的方法:
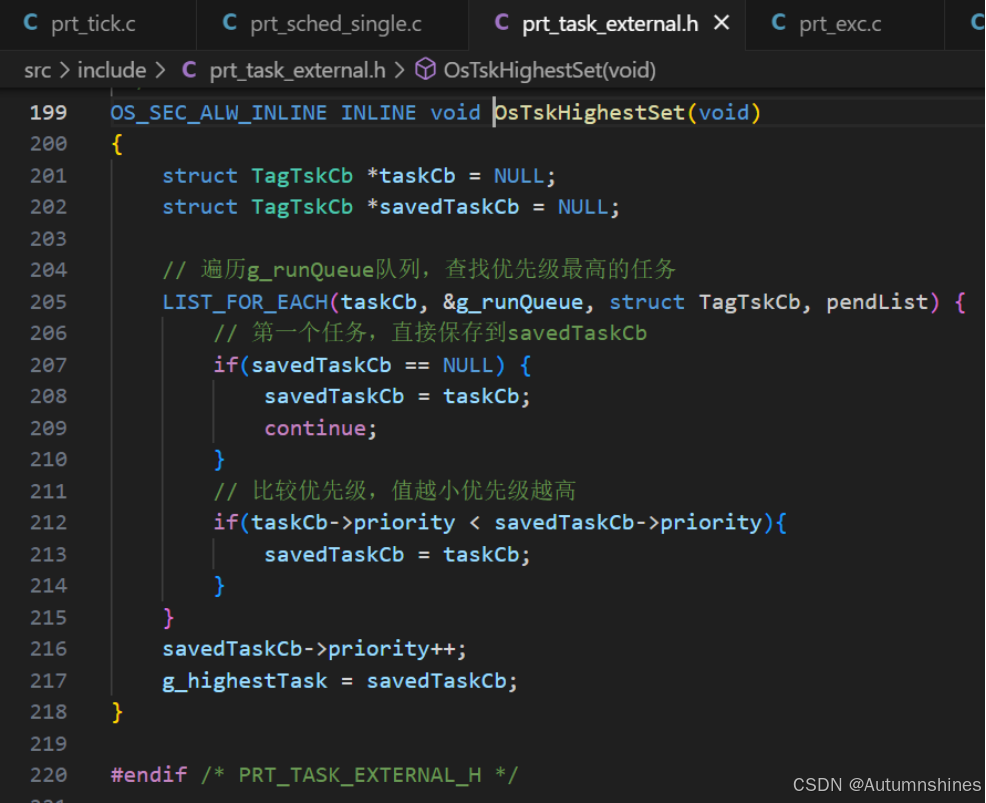
首先在OsTskHighwstSet函数中增加一项priority++的操作,由于每次调度都会调用该函数,这就使得每一次调度完成之后对应任务的优先级都减一。
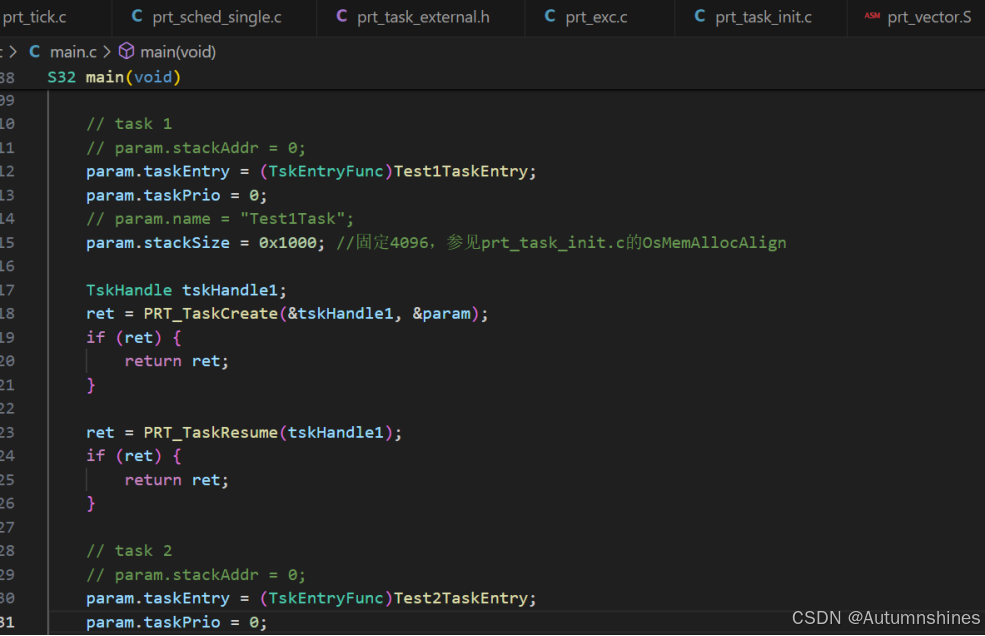
接着将两个任务的初始优先级均设置为最高(priority越小优先级越高)
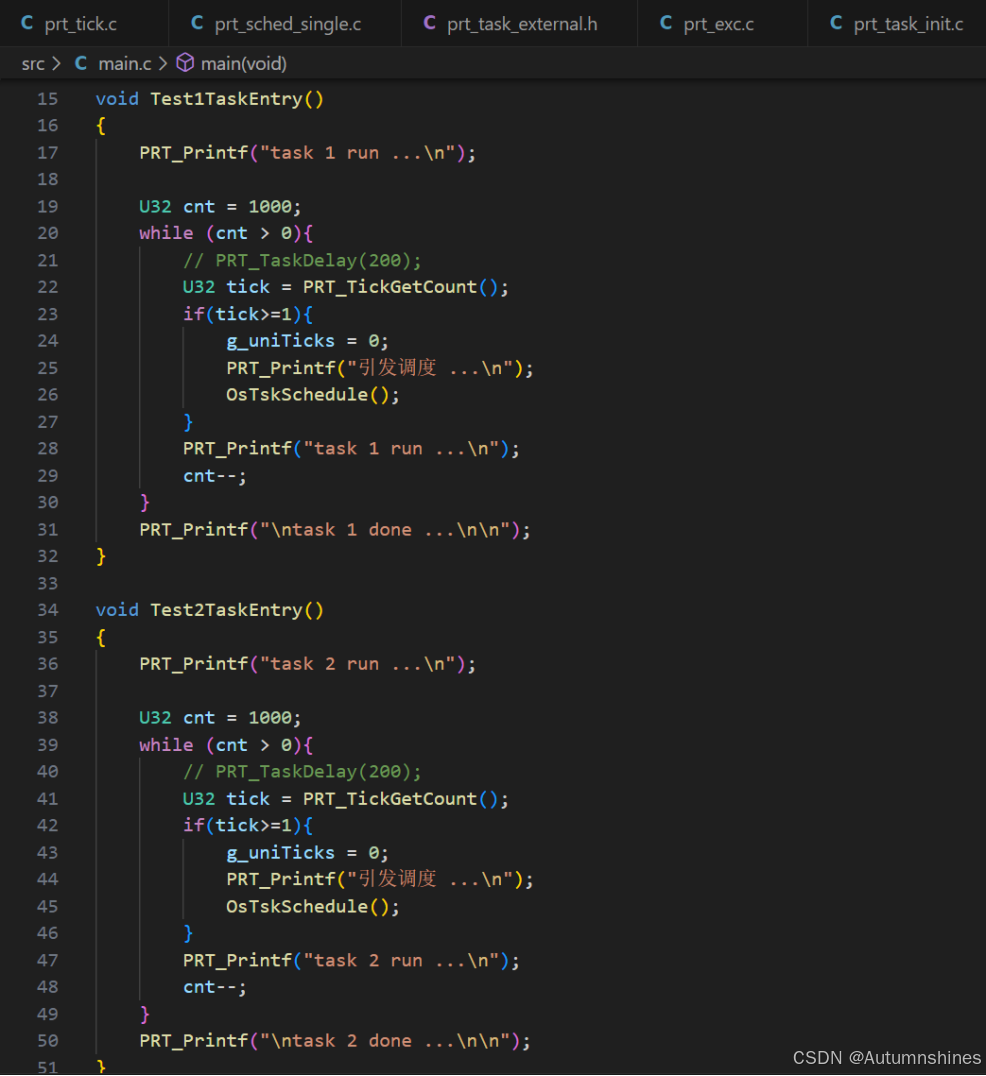
最后修改两个任务,将时钟信号转换为电平信号,每隔一段固定的时间就触发高电平,引发调度,这样就很好的实现了分时共享
演示效果:

第二种方法通过给每个进程设置时间片进行轮转调度:
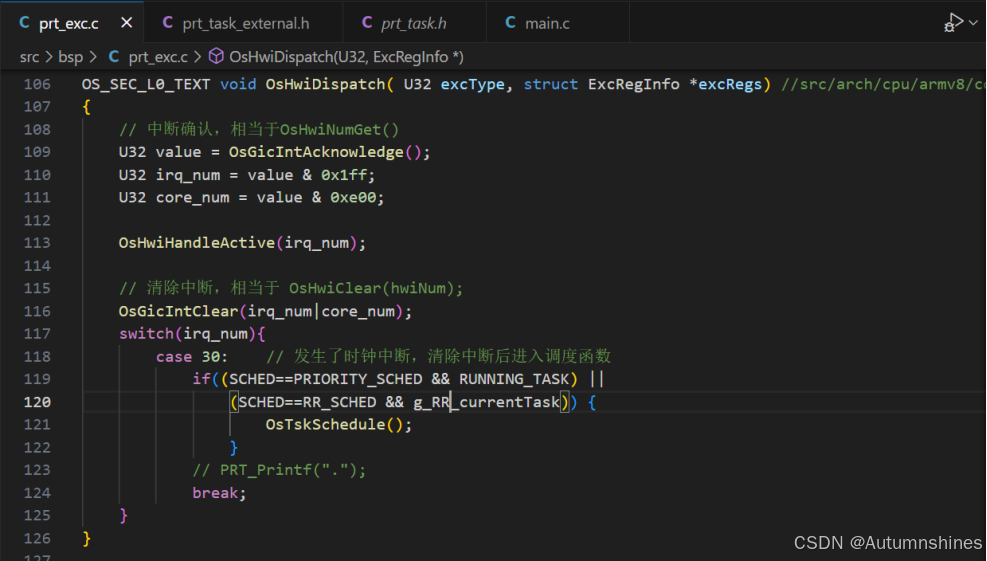
首先修改Dispatch调度函数,在中断清除之后新增设调度的情况,即当满足轮转调度或者优先级调度(当某个任务运行结束后,将最高优先级的任务调度运行)的条件,并且相应调度队列不为空时,调用OsTskSchedule函数发起调度
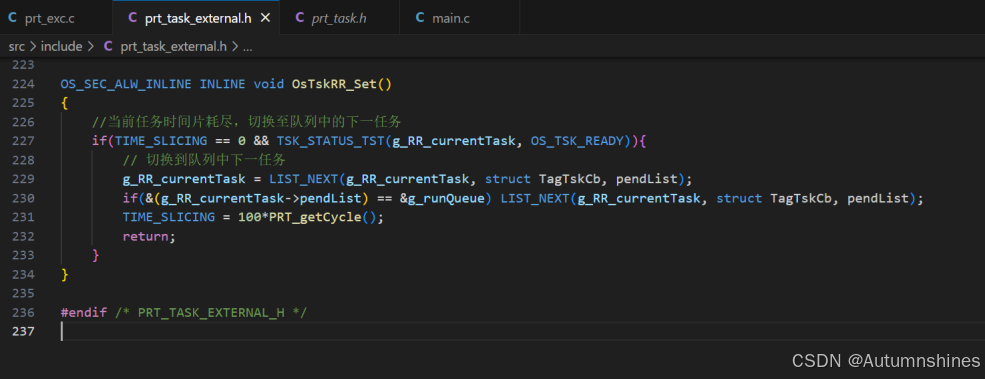
接着仿照优先级调度函数中找到运行队列中的最高优先级任务OsTskhighest_Set函数,定义轮转调度函数中寻找下一运行任务的函数OsTskRR_Set,其中定义了每一个任务的时间片长度为100个时钟中断的时间
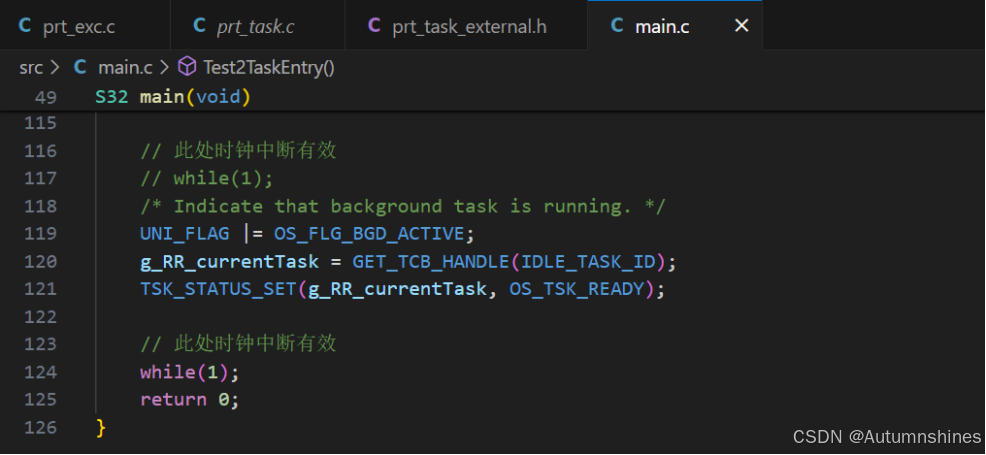
在main函数中对轮转调度队列进行初始化
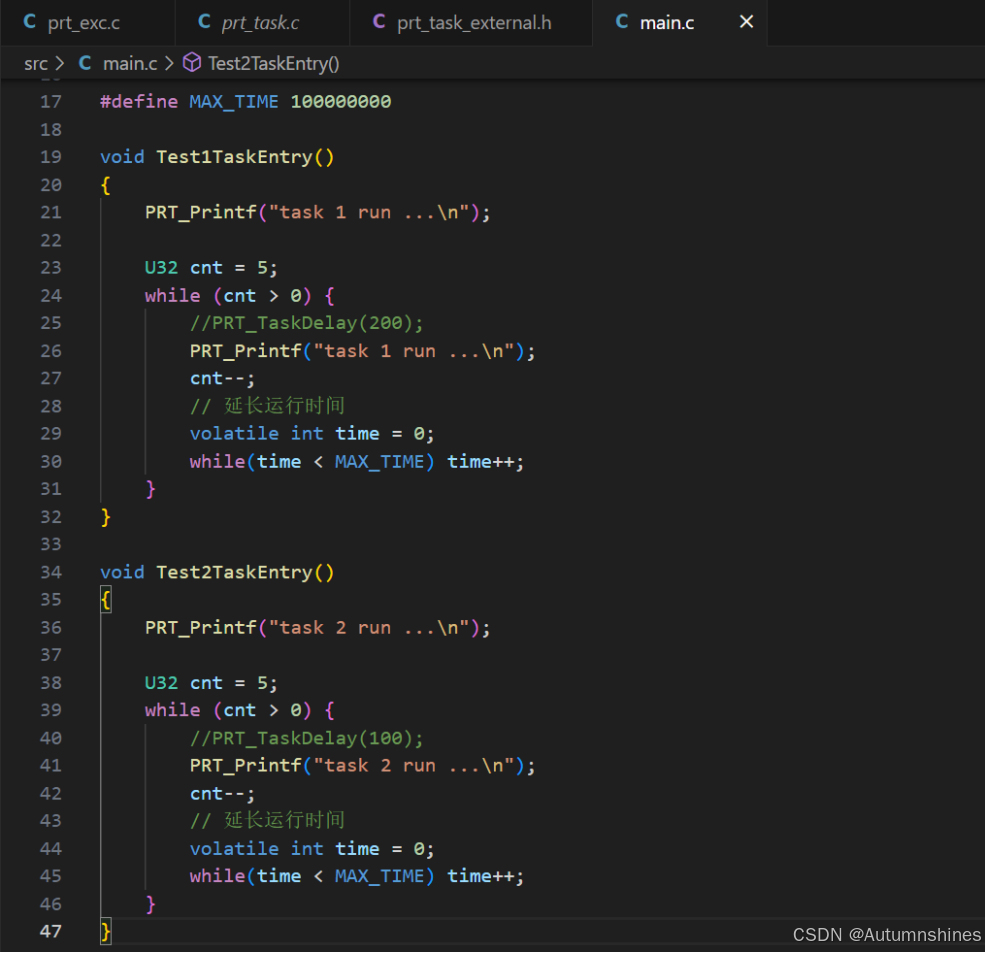
最后修改任务1、2,延长运行的时间,便于更加直观地看到轮转运行
演示效果:
五、 心得体会
-
对调度系统的工作原理有了更深刻的理解
-
对分时调度系统的工作原理有进一步的理解
-
更加熟悉调度系统的数据结构以及功能函数