2. 双目立体视觉测距原理
2.1 视觉坐标系
在双目立体视觉系统进行成像时,核心任务在于把空间中的三维坐标转换为像素坐标。该技术借助相机成像模型,将三维世界里的物体及其对应的二维图像实现映射。通常情况下,这一过程会涉及三个坐标系之间的转换,分别是图像坐标系、相机坐标系以及世界坐标系。其中,图像坐标系主要用来描述像素点在图像中的具体位置,相机坐标系为物体在相机视角下的相对位置和方向,而世界坐标系则表示物体在现实空间里的位置和方向。
(1)图像坐标系
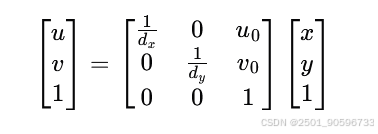
图像坐标系示意图如下图2.1所示。其中,



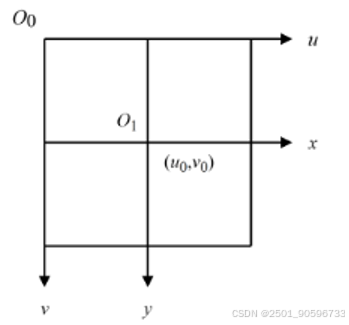
图2.1 图像坐标系
假设在坐标系



(2)相机坐标系
相机坐标系示意图如下图2.2所示,其中



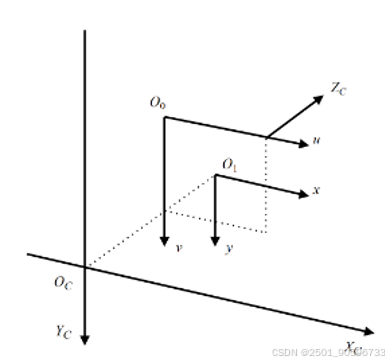
图2.2 相机坐标系
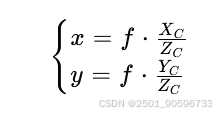
假设图像坐标中,某一点的坐标为(x,y),而在相机坐标系中,该点的坐标为(
(3)世界坐标系
世界坐标系表示三维世界的真实坐标,包括互相垂直的三个坐标轴


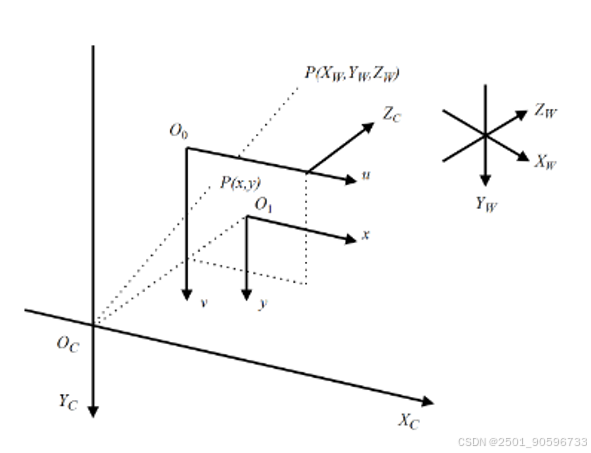
图2.3 世界坐标系
将某个点从在世界坐标系中的坐标转换为在相机坐标系下的坐标,其方法如下式所示。其中,R表示旋转矩阵,T表示平移变量。

PS:亲爱的读者朋友们,大家好!首先非常感谢您抽出宝贵的时间阅读我的这篇博客。我想在此特别说明一下,这篇博客仅仅是我在个人学习、探索以及实践过程中的一个记录。我深知自己并非该领域的绝对专家,知识水平和实践经验都有限。因此,我不能确保博客中所提及的所有信息、观点和方法都真实和准确。